基于GAPSO的舰艇磁性参数求解方法
2018-08-28白玉栋朱兴乐
白玉栋,朱兴乐
(解放军91404部队,河北 秦皇岛 066001)
0 引 言
海洋三分量地磁场作为重要的地球物理信息,在地磁匹配导航、舰艇磁防护等领域有着重要的应用[1]。目前海洋环境下三分量地磁场测量常采用船载式测量方法[2-4],通常将三分量磁传感器安装于舰艇桅杆处,以实时监测地磁场变化。由于舰艇大都由钢铁材料建造,在地磁场作用下会产生舰艇磁性磁场,这对地磁测量会产生较强的干扰,因此需要将舰艇磁场有效补偿。由于舰艇磁场可通过磁性参数表示,这样舰艇磁场补偿问题就转化为舰艇磁性参数的求解问题。
国内外学者针对舰艇磁性参数的求解进行了相关研究。20世纪80年代日本采用船载三分量磁测仪(STCM)进行了大规模的船载地磁测量[5],根据舰艇航向360°变化下的测量值求解出了舰艇的磁性参数,将舰艇磁场补偿后其地磁测量精度达到了50±25 nT。文献[4]对水下航行器的路径进行了优化,采用差分进化(DE)算法获得了较高精度的磁性参数,可将磁测量误差降到数十纳特。文献[5]根据舰艇特定姿态下的磁测量表达式推算出了舰艇的磁性参数,但实际航行中舰艇姿态一般难以保持在稳定值。由于舰艇受风浪、涌流及重力的影响不可避免会发生晃动,通过使舰艇在摇晃状态下绕圈行驶可以使磁测量数据在三维空间上均匀分布,从而便于磁性参数的精确求解,在此基础上提出一种新的舰艇磁性参数解算方法。本文对舰艇摇晃状态下绕圈行驶的磁测量值进行模拟,采用GAPSO算法可求解得出舰艇的磁性参数,同时分析了姿态角测量精度对磁性参数解算的影响并对其结果进行了仿真验证,从而证明了该方法的正确性。
1 船载地磁测量模型
船载地磁测量中磁传感器测量值中包含地磁场、舰艇磁场与涡流磁场。地磁场Be随时间变化缓慢,可认为是定值,舰艇磁场分为感应磁场与固定磁场,其中舰艇感应磁场Bi与地磁场成比例变化,固定磁场Bp不随时间变化,由于舰艇航行过程中产生的涡流磁场一般很小,故可以忽略,则地磁测量表达式Bm可简化为:
Bm=Be+Bi+Bp
(1)
舰艇感应磁场Bi与固定磁场Bp具体可表达为:
(2)
Bp=[Bpx,Bpy,Bpz]T
(3)
式中:K为舰艇的感应磁化矩阵;kij为感应磁场i分量与地磁场j分量之间的比值,kij与Bpi均为定值,因此欲将舰艇磁场有效补偿需要求解出K与Bp中12个参数。
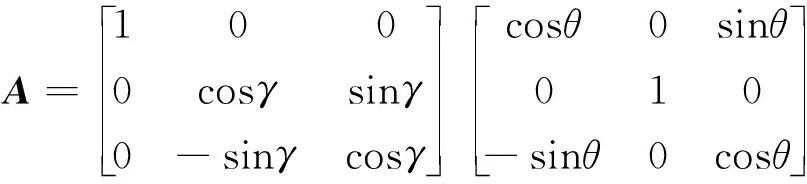
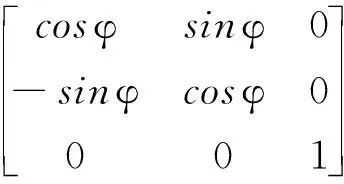
当舰艇在航行中受风浪及重力的影响会发生摇摆晃动,导致舰艇坐标系与地磁坐标系在三维姿态空间上分别产生横摇角γ、纵倾角θ、航向角φ,这3个角度统称为舰艇姿态角,则地磁三分量在舰艇坐标系下的投影因此改变,从而引起舰艇感应磁场Bi发生变化:
Bi=KABe
(4)
(5)
实际航行中,舰艇姿态角可由导航设备获得,在不考虑船体发生扭转弯曲的情况下,认为三分量磁通门传感器的姿态与舰艇姿态一致,则由式(1)、(2)、(4)可得实际磁测量值为:
Bm=ABe+Bi+Bp=(I+K)ABe+Bp
(6)
式中:I为单位矩阵。
由式(6)可得海洋三分量地磁场的解算表达式:
Be=A-1(I+K)-1(Bm-Bp)
(7)
在推算舰艇磁性参数前其三分量地磁场是预先测量的[3,5],将式(7)中解算的地磁场数值与预先测量值比较,即可判定舰艇磁性参数是否准确,本文就是根据这个思想求解舰艇的磁性参数。由式(7)可知姿态角及磁测量值Bm的精度直接影响舰艇磁性参数的解算,为此假定姿态角由高精度导航设备获得,且认为三分量磁通门传感器没有正交、标度、零偏等固有误差,以保证测量的精确性。
2 求解方法
舰艇的航行姿态决定着磁测量数据在空间上的分布,文献[6]表明均匀对称分布的测量数据有利于求解出较准确的结果。由于舰艇摇晃时其横滚角与纵倾角不断变化,当舰艇绕圈行驶可使其姿态在三维空间上均匀变化且磁测量值包含着更多的舰艇磁场信息,从而有利于磁性参数的精确求解,为此本文根据舰艇绕圈行驶下的测量值采用遗传-粒子群优化(GAPSO)算法求解舰艇磁性参数。
由于PSO收敛速度快但易陷入局部最优,GA全局收敛能力较强但搜索速度慢,为此以PSO为主线,将GA中的交叉变异步骤融入到PSO中,以充分利用各自的优点,形成快速收敛到全局最优解的混合算法[7]。定义GAPSO中个体为12维的求解向量,代表着需求解的舰艇磁化参数,将其代入式(7)可得出三分量地磁场的计算值Bc,当求解参数准确时Bc应与地磁预先测量值Be一致,由此定义求解的目标函数F为:
(8)
式中:q为磁测量数据个数,当目标函数F趋于零时可得出准确的舰艇磁化参数。
GAPSO算法流程图及主要步骤如下:
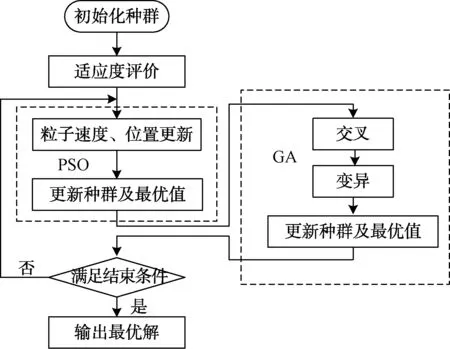
图1 GAPSO算法结构示意图
(1) 种群初始化。定义种群中粒子数为n,每个粒子含有12维,第i个粒子Xi=(x1,x2,…,x12),其中前9个参数代表K矩阵中元素,后3个代表Bp中元素,根据粒子的搜索范围对种群进行初始化。
(2) 适应度评估。根据目标函数F求出各粒子的适应度值,得出粒子个体历史最优值Pbest及群体最优值Gbest。
(3) 粒子位置速度更新。粒子根据Pbest及Gbest更新速度与位置,在第d维表达式为:
vi,d(k+1)=ω·vi,d(k)+c1·r1·(pbest-xi,d)+
c2·r2·(gbest-xi,d)
(9)
xi,d(k+1)=xi,d(k)+vi,d(k+1)
(10)
式中:k为迭代次数;c1与c2为加速因子;r1与r2为[0,1]内的随机数;ω为惯性权重系数,取较大值时有利于全局搜索,较小值有利于局部搜索。
搜索过程中ω的变化公式为:
ω(k)=ωstart-(ωstart-ωend)·(k/T)
(11)
式中:T为最大迭代次数;ωstart与ωend分别为ω取值范围的边界值。
(4) 遗传操作步骤。对种群进行交叉变异操作,按交叉概率pc从群体中选择2个个体Xi与Xj,并在第d个元素上按下式进行交叉[8]:
xidk+1=(1-r)xidk+rxjdk
(12)
xjdk+1=rxidk+(1-r)xjdk
(13)
根据变异概率pm选择个体并对其指定位置进行离散变异。
(5) 更新种群。将新产生的个体与父代比较,若适应度变大则更新种群,同时更新种群中个体历史最优值Pbest及群体最优值Gbest。
(6) 结束条件。当搜索达到最大迭代次数T则输出最优解,否则返回步骤(3)继续搜索。
3 计算结果与分析
3.1 测量值模拟
首先根据式(6)对磁测量值进行模拟计算,设定测量海域三分量地磁场Be=[36 000,19 000,28 000](nT),磁传感器所在位置处的舰艇感应磁化矩阵K=[0.12,0.015,0.01;0.02,0.08,0.025;0.009,0.012,0.15],固定磁性分量Bp=[500,-300,700](nT)。对舰艇的摇晃状态进行模拟,设定其横摇角及纵倾角成正余弦规律变化,横摇角γ=3sin(2πt/20)°,纵倾角θ=3cos(2πt/15)°,当舰艇绕圈行驶时其航向角变化为φ=6t°,测量时每秒采集1次,共测60组数据,则由式(6)得出磁传感器的测量值Bm1,为模拟磁通门传感器的测量误差对Bm1加入了幅值5 nT的高斯白噪声。若舰艇无磁性则磁测量值Bm2=ABe,定义ΔB=Bm1-Bm2,ΔB在三分量上的分布如图2所示。

图2 ΔB变化曲线
由图2可知,舰艇磁场导致的磁干扰在三分量上达到了数千纳特,因舰艇在垂向上摆动较小,故ΔB在Z分量上相对较小,其磁干扰强度说明船载测磁中有必要对舰艇磁场进行补偿。通过使舰艇在海面上绕圈航行,基本上使磁测量值在三维空间分布区域达到最大化,使之有利于求解出准确的舰艇磁性参数。
3.2 求解结果及验证
采用GAPSO混合算法对磁测量值求解磁性参数,算法初始条件设定如下:
(1) 种群中粒子个数n=50,每个粒子含有12个参数,前9个参数的求解范围为[-0.5,0.5],后3个参数求解范围为[-1 000,1 000],最大迭代次数T=10 000。
(2) PSO算法中参数:c1=c2=1.494 45,r1与r2为[0,1]区间中随机数,惯性权重系数ωstart=0.9,ωend=0.4,粒子速度范围为[-0.5,0.5]。
(3) GA算法中参数:交叉概率pc=0.6,变异概率pm=0.01。
船载测磁时舰艇姿态角由导航设备获得,但测量值并不能保证完全准确,其精确度对求解结果影响较大,因此本文对姿态角精度的影响进行了分析。令姿态角测量精度分别为0°、0.01°、0.03°、0.05°,则此4种测量条件下的求解结果如表1所示。

表1 舰艇磁性参数求解结果对比
由上述结果可知,姿态测量精度对舰艇磁性参数的解算有较大影响,当姿态角测量完全准确时,舰艇磁性参数解算值与设定值基本一致,Bp在三分量上的误差在5 nT左右。随着姿态角测量误差的增大,其解算精度不断变小,当姿态角精度为0.01°、0.03°和0.05°时,其Bp三分量解算误差最大幅度分别达到了10 nT、25 nT、70 nT,说明姿态角测量精度越高,解算的地磁场越接近地磁真值,因此需采用高精度的导航设备获得准确的舰艇姿态角,以将舰艇磁场有效补偿。由于导航设备精度越高价格越昂贵,综合考虑解算误差与价格因素,选定在姿态测量精度为0.03°条件下进行船载测磁验证。设定舰艇绕圈行驶的姿态角测量值γ=(2cos(2πt/30)+0.03r)°,θ=(2sin(2πt/25) +0.03r)°,φ=(2t+0.03r)°,r为[0,1]区间变化的随机量,每秒采集1次磁场数据,共测量100组,则由式(7)可计算得出地磁场解算值,定义ΔBe为解算值与真实值之差,则ΔBe在三分量上的结果如图3和表2所示。

图3 ΔBe变化曲线

最大值最小值平均值方差ΔBex24.45-22.52-2.679.62ΔBey32.94-34.12-1.6115.17ΔBez28.77-24.074.4512.12
由表2可知,将姿态精度0.03°下求解的舰艇磁性参数直接用于船载地磁测量,可有效补偿舰艇磁场的干扰,计算的地磁场与真实值间的误差在三分量上不超过40nT,其精度基本满足船载地磁测量的标准,说明上述舰艇磁性参数的求解结果是正确的,从而也验证了本文对舰艇磁性参数求解方法的正确性。
4 结束语
舰艇磁场是船载地磁测量中的重要干扰源,欲将舰艇磁场有效补偿需获得准确的舰艇磁性参数。本文提出了一种获得舰艇磁性参数的求解方法,使舰艇在摇晃状态下绕圈行驶,可将磁测量数据在姿态空间上均匀分布,采用GAPSO混合算法得出舰艇的磁性参数。分析了姿态测量精度对解算结果的影响,指出在姿态测量误差不超过0.03°的条件下,将船磁补偿后计算得出的地磁场在三分量上误差不超过40nT。该方法符合舰艇实际航行状态,易于操作,对实际船载地磁测量具有重要的指导意义。
