平面阵列天线结构轻量化设计分析及优化
2018-08-25王伟,杨楠
王 伟,杨 楠
(西安铁路职业技术学院陕西西安710026)
随着天线通信知识和技术的迅速发展,以及国际上对天线的诸多研究方向的提出,都促使了新型天线的诞生,阵列天线[1]就是研究的新一种方向。阵列天线是一类由不少于两个天线单元规则或随机排列并通过适当激励获得预定辐射特性的特殊天线,它不是简单的将天线排成我们熟悉的阵列样子,而是根据馈电电流、间距、电长度等不同参数来构成阵列,以获取最好的辐射方向性。这就是阵列天线的优势所在,可以根据需要来调节辐射方向性。由天线阵列所产生的辐射电磁场是所有组成该天线阵的各个单元辐射场的总和(矢量和),由于各单元的位置和馈电电流的振幅和相位相对独立,因此均可以独立调整,这就使阵列天线具有各种不同的功能,而这些功能是单个天线无法实现的。
文中所研究的阵列天线是以某一工程为依据,其阵列天线的结构形式是由多个直线阵在一平面上的平面阵,该平面阵是由16个4×4单元构成。由于该天线工作范围为VHF频段,其精度要求并不是很高,所以为了降低成本,该天线的传动系统采用单链传动。单链传动与双链传动相比,单链传动负载力矩明显小于双链传动,为了使单链传动满足天线驱动要求,需对阵列天线反射体进行轻量化设计,并要求阵列天线反射体满足一定精度要求。
1 模型创建
依据某一具体工程,建立4×4阵列天线模型,该天线为VHF频段,天线结构主要分为两部分,分别是面阵反射体和座架,其结构形式如图1所示。
2 面阵反射体分析
面阵反射体的背架采用桁架结构,其顶面为5 200 mm×5 200 mm的正方形结构,用于支撑16个阵子单元,根据极化方向,该正方形桁架旋转45°放置,反射面精度要求0.8 mm,该天线要求方位和俯仰角速度为15°/s,角加速度为15°/s2,为了降低成本该天线的传动系统采用单链传动,因此反射体必须进行轻量化设计,设计依据为满足天线变形条件的基础上反射体质量最轻。文中利用ABAQUS有限元分析[2]软件的静态分析[3]方法计算了三组同一背架结构形式,但不同梁截面大小的反射体变形量,并根据计算结果确定了面阵反射体[4]的组成结构和型材属性。随后结合最大变形发生的位置进行局部加强和优化。
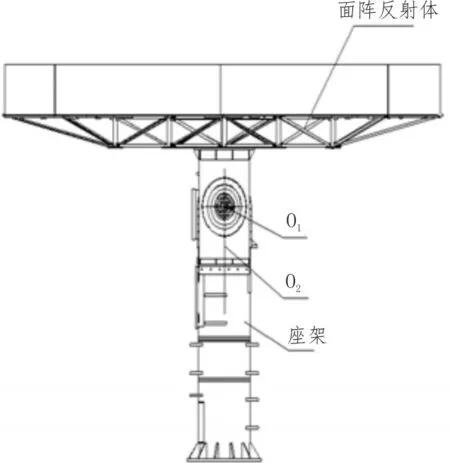
图1 平面阵列天线结构图
2.1 材料特性
该反射体背架结构采用角钢连接,其材料特性如下所示:
杨氏模量 EX=2.06×105 MPa
泊松比 NUXY=0.3
密度 DENS=7.85×10-6kg/㎜3
2.2 边界条件
桁架背架上放置16个阵子单元,每个单元质量8 kg,为了更加准确的将阵子产生的压力施加到桁架结构上,有限元模型建立时在桁架上[5]表面建立一点RP-1,作为参考点。在ABAQUS中将该点与桁架上安装阵子的位置相耦合,由于整个桁架上每个阵子对连接点施加压力产生的变形不是完全相同的,所以耦合方式为分布耦合。桁架朝天姿态下,该点施加F1=1 280 N竖直向下的集中载荷,从而模拟阵子天线对桁架施加的外载。桁架除了承受阵子天线对其产生的压力,还受到自身的重力变形,其自身重力不能忽略,所以在桁架整个模型上施加g=9.8 m/s2的重力加速度。
天线工作时通过座架将整个反射体支撑起来,所以在分析反射体时将放射体与座架相连的部分固定。文中采取边界条件定义的方式是将桁架和座架连接的区域与RP-2点相耦合[6],并将RP-2固定,从而实现桁架边界条件的定义,如图2所示。

图2 边界条件和载荷
2.3 结果分析
文中的面阵反射体桁架由两种型号的角钢组成,其中主要受力框架由稍大号型角钢组成,记为角钢1,而次要受力连接杆和阵列单元安装支架[7]均采用小一号角钢连接,记为角钢2。文中模拟的三组模型见表1所示。
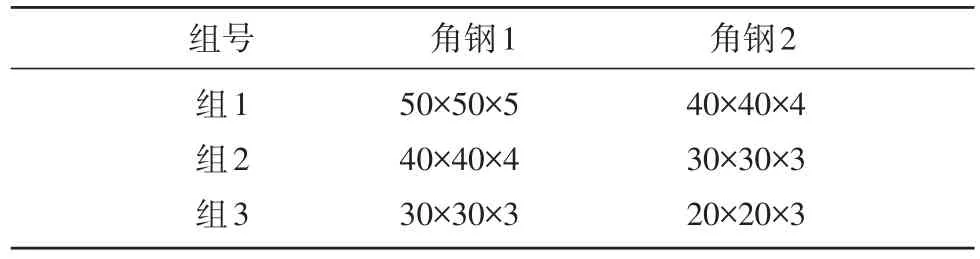
表1 型材规格
首先根据组2的分析结果验证模型的准确性,结果显示当桁架受到阵子和本身自重的合力作用下[8],RP-2的支反力为4 497 N。而在三维软件建模时整个桁架和所有阵子单元的总重量为462.1 kg,理论上施加在RP-2的支反力应为4 621 N,有限元分析结果和理论正确值的误差为5.1%,通过这个验证,可以确定该有限元分析的建立是准确可靠的。
针对以上3组模型对其有限元结果进行分析,组1、组2、组3在天线朝天状态下桁架变形分别如图3、4、5所示。结果显示三组模型变形最大处均发生在桁架安装阵子[9]的四个顶角,组1的最大变形量为0.715 mm,组2的最大变形量为1.12 mm,组3的最大变形量为2.95 mm。每组桁架变形较大的4个节点变形量也不尽相同,造成这一现象的原因主要由两点,首先该桁架结构并非完全对称结构,而是近似的对称结构;其次桁架下表面与天线座架连接后,点1和点2比点3和点4距离固定点[10]的距离比更小,因此点3和点4悬臂更长变形更大。
3组模型的结果对比如表2所示。
从对比结果看,组1的变形量最小,但是其反射体重量却是最大的,组3重量虽然最小但变形量达到2.949,为了满足天线单链驱动[11]的要求,应在满足精度要求的基础上尽量减轻重量,从而满足该天线快速响应要求[12]。所以对组2进行进一步优化,是其在重量变化很小的基础上提高其刚性。
4个顶角改进后的结构形式如图6所示,图中虚线为增加的两件连接杆,其结构为30×30×3的角钢,并根据转动惯量在桁架上增加角加速度15°/s2的惯性力矩,
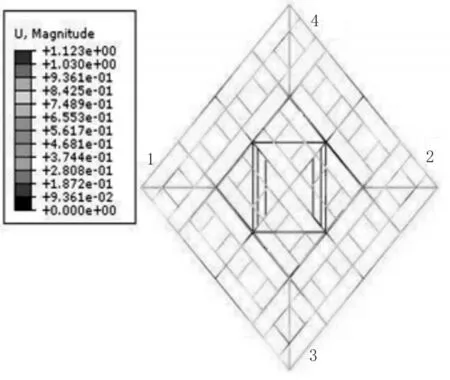
图3 组1变形结果
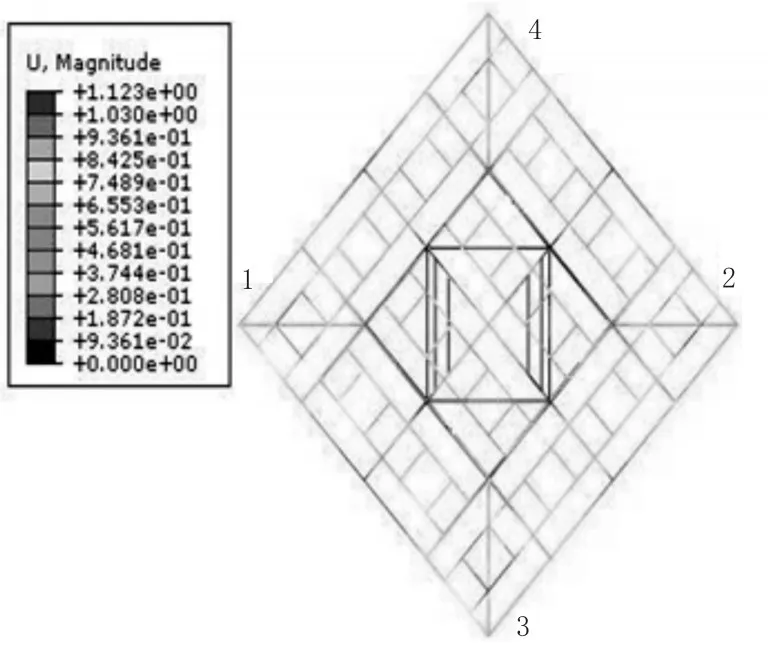
图4 组2变形结果
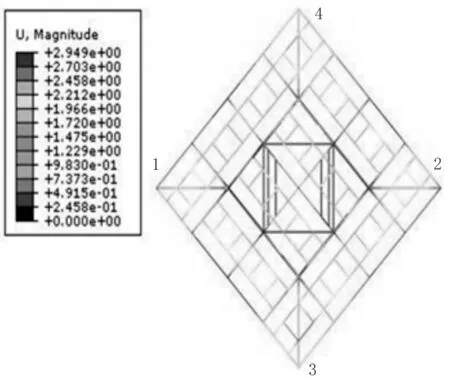
图5 组3变形结果
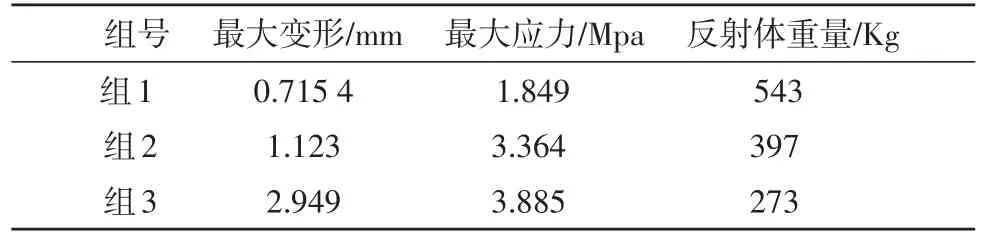
表2 结果对比
惯性力矩MJ=J·ε
式中:
J——系统转动惯量;
ε——角加速度。
根据模型在三维软件计算反射体的转动惯量如下:
JA=1 956 kg.m2;JE=1 468 kg.m2
由此可得方位惯性力矩:

俯仰惯性力矩:

改进后在朝天状态下增加方位惯性力矩的变形结果如图7所示,变形最大值由原先的1.123 mm降低为0.836 mm,位置点4的刚性明显提高[13],其变形量仅为0.45 mm,变形最大处位于安装阵子单元的四个边,整个桁架变形更加均匀,变形值均方根为0.42 mm,满足反射面精度要求。
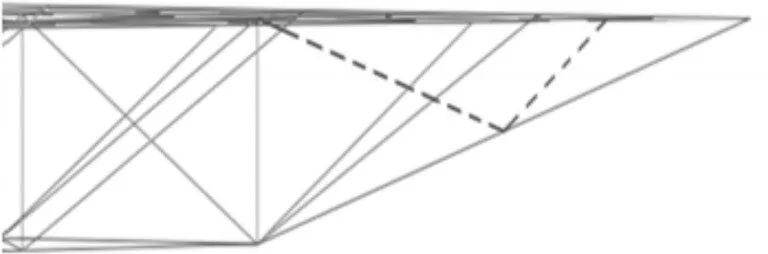
图6 结构优化示意图

图7 优化后朝天状态下变形图
改进后在指平状态下增加方位惯性力矩的变形结果如图8所示,变形最大值为2.99 mm,位置4变形量为2.41 mm,位置1为1.11 mm,位置2为是1.1 mm。变形最大位置为位置3、4桁架的顶角处,而其它安装阵子的位置变形量并不是很大,变形值均方根为0.82 mm,小于0.9 mm,满足设计要求。
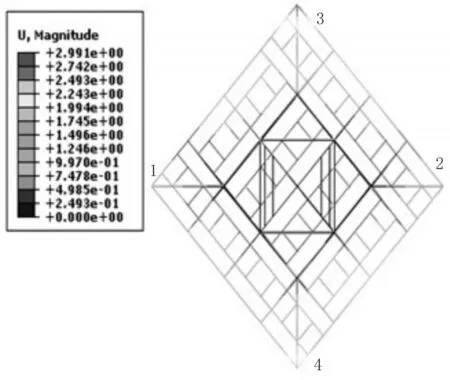
图8 优化后指平状态下变形图
3 传动系统校核
结构确定后对其方位和俯仰的传动装置进行校核,使天线满足方位和俯仰的驱动要求。
3.1 负载力矩
方位转动需要克服方位轴承的摩擦力矩和惯性力矩,由于该天线位于天线罩内,因此不考虑风力矩[13]。
根据以往工程经验估算,该天线方位摩擦力矩MfA=100 kg·m ,俯仰摩擦力矩MfE=90 kg·m 。
方位总负载:
俯仰总负载:
3.2 传动校核
为了在保证质量前提下降低成本,因此在原有的天线座基础上将双链传动改为单链传动,选择电机额度转速1 200 r/min,转速可调,功率2.2 KW,减速机速比70,,末级大小齿轮速比为6,电机在额定功率工作时,其方位和俯仰的转速为ωA=ωE=1 200×360/60/420=17.1°/s,满足转速要求。
电机输出扭矩
输出扭矩TA=TE=1.75×70×6=735 kg.m
完全满足负载要求。
4 结 论
文中利用有限元分析方法对平面阵天线反射体进行设计和优化[14],通过对比三组不同桁架截面梁分析结构,确定了以组2的角钢建立反射体桁架,并对其局部变形较大的位置进行结构优化设计,最终确定了该面阵天线的具体结构。随后将该结构的惯性力矩[15]添加在模型上并再次进行分析,确定了最终反射体桁架均方根精度为0.42 mm,重量为397 kg,满足天线精度要求。最后对该天线的传动系统进行分析,确保传动系统满足要求[16]。文中形成了从初步构建模型、有限元分析[17]、确定初步模型、优化并分析确定最终模型、校核该模型的整个设计方法[18],最终为产品的实现提供可靠依据。
根据本文分析所设计出的平面阵天线反射体是满足传动和电气性能要求的。
