基于光电传感器的智能车寻迹系统
2018-08-22吴祥飞何恩节郑磊陈宏茂
吴祥飞,何恩节,郑磊,陈宏茂
(安徽科技学院电气与电子工程学院,凤阳 233100)
0 引言
智能汽车是一个集物联网信息处理、外界环境感知、行驶决策、路线规划等功能于一体的综合智能控制系统[1]。汽车智能技术以信息技术为核心,综合运用了计算机、传感器、人工智能以及自动控制等方面的技术,是现代尤为典型的高新技术综合体[2]。“飞思卡尔”智能车竞赛使用的智能车模作为智能汽车的缩微模型,要求智能车在预先未知路况的情况下,能够利用其本身的各种传感器判别复杂路况,并将所获取的路况信息做智能化处理,得以实现沿引导黑线以较高速度稳定行驶。路径识别和路况信息处理在智能车系统中起着尤为关键的作用,路况识别和行驶方案选取的好坏,直接关系到智能车性能的优劣。因此光电传感器的布局和电路设计,路径规划算法的优化是智能车总体设计方案的两大重点。
1 光电智能车整体结构
光电技术智能车按照功能可分为五个部分:主控模块、光电传感器模块、电源模块、速度检测模块、舵机驱动和电机驱动模块。光电智能车整体结构图见图1。

图1 光电智能车整体结构
1.1 主控模块
主控模块采用的中央控制单元为混合信号ARM Cortex-M4系列32位单片机MK60N256VLQ100,此单片机具有256KB的Flash,128KB的RAM,高精度16位ADC、12位DAC和100MHz的工作频率,其各性能都满足智能车对主控制器资源的要求[3]。K60最小系统见图2。
1.2 光电传感器模块
光电智能车通过加装各类光电传感器实现路径检测、路况判别、路线优化等功能。光电智能车使用的光电传感器有:红外光电传感器、光电编码器、红外遥控、光敏电阻。
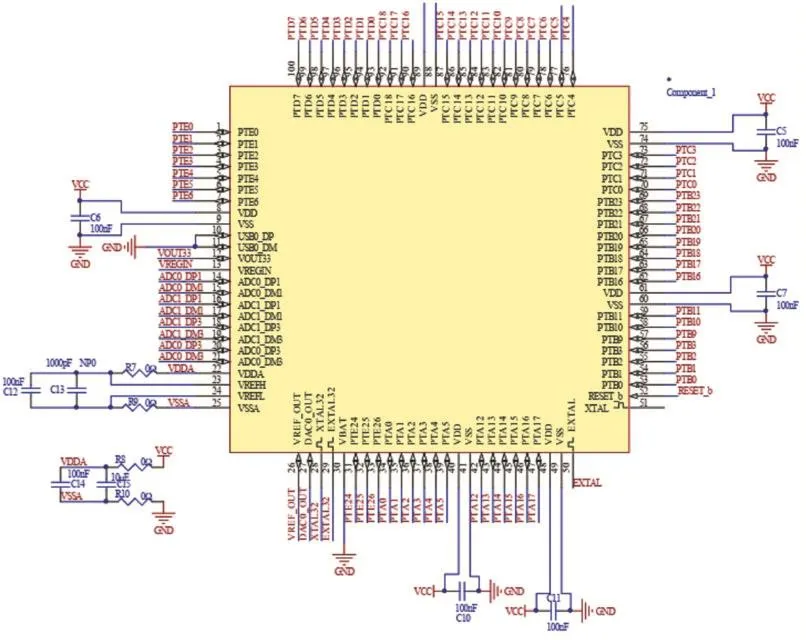
图2 K60最小系统
1.3 电机驱动模块
1.4 电源管理模块
电源模块采用LM1117-5V、LM117ADJ、LM1117-3.3V、MC34063等稳压芯片实现对光电智能车各模块供电,电源管理模块将供电电源(7.2V)经多路DC-DC转换后,为中央控制器(5V)、舵机(6V)、光电传感器(3.3V)、电机驱动(5V)等模块供电。另外,电源模块设
电机驱动模块是由大功率驱动芯片BTS7960搭建的全H桥驱动电路,BTS7960组成的全H桥电路具有过热过流保护、有效隔离电机驱动模块和其他模块和强劲的驱动和刹车效果等优良的性能。主控制器通过输出两路PWM控制信号来驱动BTS796芯片,实现驱动电机正反转。电机驱动模块见图3。计有防反接和静电保护的功能,可有效保护整个电路系统。电源模块见图4。
2 光电传感器
光电传感器通过把变化的光强度信号转换成变化的电信号实现探测。绝大多数的光电传感器由发送器、接收器和检测电路这三部分构成[4]。
发射端(半导体光源)通过对准目标发射连续或变光脉冲宽度的光束,给接收器传输持续或间断的光信号。接收端(半导体接收器)通过接收发射器发送来的光信号并将光信号转换为相应的电信号。发射的光束一般来源于半导体光源,有LED、LD及IR LED;而接收器则有 Photo-Diode、Phototriode、Photocell。通常,为了能够最大限度地提高光电传感器信噪比(SNR),在接收器的前面会装有透镜和光圈等光学元件,在接收器的后端则配有耦合、滤波、还原、放大功能的检测电路。
按光电传感器的工作方式可以将光电传感器分为槽型光电传感器、对射型光电传感器、反光板型光电开关和扩散反射型光电开关四种类型[5]。
2.1 红外遥控
红外遥控属于对射型光电传感器,其在光电智能车调试环节起到关键的作用,可为智能车的调试带来极大的便利[6]。为了提高光电智能车的调试效率、寻求最优算法和路线,在经过十字、环形、S弯、斜坡等复杂路况时,可利用红外遥控设置智能车的过道速度、内外轮差速、调速PID参数和舵机打角PID参数。
2.2 红外光电传感器

图3 电机驱动模块

图4 电源模块
为了能够及时准确获取光电智能车的位置信息,需要在车前部加装红外光电传感器。红外光电传感器属于扩散反射型光电开关,由一个发光二极管和一个光敏三极管组成。当发射端发射的光信号照射到黑色物体时,光信号会极大的减弱,致使接收端的响应电压小于阈值电压,则系统判别此时光电对管在黑线正上方。获取位置信息后,将偏心距ek带入舵机打角PID函数,实现稳定快速调整小车位置。
2.3 光敏电阻
红外光电传感器作为光电智能车最为关键的要素,其受外界光照强度的影响极大,在面对不同的路况和环境,给其设置固定的阈值是不能满足智能车的要求的。然而,通过加装光敏电阻则可实现阈值的自适应调节。光敏电阻将感知到的外界光强信号转化为电信号,这样就可以自适应调节红外对管的感光灵敏度。
2.4 光电编码器
光电编码器属于对射型光电传感器。想要实现智能车在不同路况按照设定速度稳定运行,则需要将其实际运行速度带入速度控制PID函数以实现半闭环控制。因为智能车在运行中存在机械损耗、道路摩擦、启停惯性和转向侧移,其实际运行速度不能始终严格按照设定速度运行,这样就需要通过加装高精度的光电编码器实时采集光电智能车实际运行速度信息[7]。
3 光电传感器硬件设计和布局
红外光电传感器采用TCRT5000反射式光电开关。当光敏三极管接收到红外信号后输出电压会发生变化,经LM324比较器整形后得到处理后的输出结果。比较电压的大小由光敏电阻受光光强决定[5]。TCRT5000电路原理图如图5。

图5 TCRT5000电路原理图
位置信息采集方式采取双排点阵采集方式。光电对管布局如图6所示(黑圈内数字为该光电对管的位权值 jk)。设定探测到黑线的光电对管位值m=1,未探测到的为零。前后排光电管偏心距为别为d1,d2,,小车重心与前排光电管距离为l1,舵机与后排光电管距离为l2,位置偏差Δ=d1+d2,小车重心偏离中心线偏心距。当Δ≤1cm时,判定路况为直线,ek=d。Δ>1cm时,判定路况为大弯,ek=d2。设定pwm0=1500为舵机舵盘转到最中间值。舵机打角算法采用PD算法,算法为pwm=pwm0+kp*ek+kd*(ek-ek-1) ,( kp、ki、kd、ek、ek-1分别为比例、积分、微分、本次偏心距、上次偏心距)[8-9]。

图6 光电对管布局

图7 控制系统流程图
4 速度控制
赛道复杂多变的智能车运行系统是典型的非线性系统,速度控制算法选取的是否合适直接影响到智能车运行系统的性能。利用定时中断模块对电机调速进行控制,每隔10ms对智能车速度进行一次更新。此处速度控制算法选取增量式PID算法,这样就需要光电编码器实时测量光电智能车的实际运行速度。光电智能车的设定速度为v,实际行驶速度v0。v=v0+kp*(ev-ev-1)+ki*ev+kd*(ev-2ev-1+ev-2)(kp、ki、kd、ev、ev-1、ev-2分别为比例、积分、微分、本次速度、上次速度、上上次速度)[8]。
5 结语
本文提出了一种基于光电传感器寻迹的智能车系统设计方法,采用MK60N256VLQ100单片机做主控制器。以CodeWarrior 10.7环境作为编程环境,在此环境下实现整个光电智能车系统开发、调试和优化。在结构方面,规划了点阵光电对管的合理布局,提高了智能车寻迹性能。在控制算法方面,加入舵机打角参量,增加了稳定性控制的因子;采用红外路径搜索算法和增量式PID控制算法,不仅保证了光电智能车在行驶过程中能够快速、准确地寻迹,而且使其可以在面对不同路况时采取不同的加减速策略。控制系统流程图见图7。实验结果表明,光电智能车系统响应速度快、稳定性好、动态性能好且整体控制性能良好。