基于三维摇杆的转台控制器设计
2018-08-09陈俐洁徐阳
陈俐洁 徐阳

摘 要:为满足某型船载探照灯和转台的实际控制需求,采用ATmega8微处理器设计了基于三维摇杆的新型控制器。实现了转台的方位、俯仰转动,并综合了转台的速度比例控制,同时还实现了探照灯的开、关及焦距调节等功能,达到了预期的控制指标。该设计在转台综合控制及操控性等方面开辟了新途径,同时也具有很强的实用价值。
关键词:探照灯 转台 三维摇杆 控制器 ATmega8
中图分类号:TB47 文献标识码:A 文章编号:1672-3791(2018)03(b)-0078-02
Abstract: In order to satisfy the actual control requirements of a certain type of ship searchlight and turntable, a new controller based on three dimensional rocker is designed by using ATmega8 microprocessor. The rotation and rotation of the turntable is realized, and the speed proportional control of the turntable is integrated. At the same time, the functions of opening and closing of the searchlight and focal length adjustment are realized, and the expected control index is achieved. The design has opened up a new way in the comprehensive control and manipulation of the turntable, and also has a strong practical value.
Key Words: Searchlight; Turntable; Three dimensional rocker; Controller; ATmega8
随着信息技术的飞速发展,探照灯被广泛应用于安防、照明等诸多领域,特殊的使用环境对其控制设备的可操作性、便捷性及可靠性等性能提出了更高的要求。鉴于摇杆操控性强、使用方便、开发容易等特点,本控制器采用三维摇杆实现探照灯及转台操控的特殊要求。
1 系统组成及控制原理
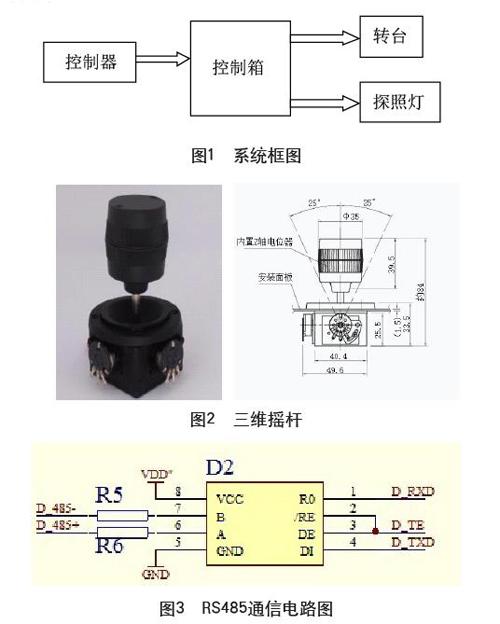
本船载探照灯转台系统包括探照灯、转台、控制箱、控制器四个部分,如图1系统框图所示。控制器上电后,通过开关灯按钮的开闭,可直接控制探照灯的开关;通过摇杆的转动可发出控制信号,控制箱接受控制信号并进行解析,再将控制命令发送给转台和探照灯,从而实现对转台的方位、俯仰以及探照灯焦距调节等控制。
2 硬件设计
2.1 主控芯片
本控制器采用ATMEL公司的ATmega8微处理器作为主控芯片。该芯片是基于RISC结构的增强型、低功耗AVR微处理器,数据吞吐能力达1MIPS/MHz,可有效缓解处理器功耗和处理速度之间的矛盾。此外,其内部集成了A/D变换、串口等硬件接口电路,可实现摇杆三维数据的模数转换,FLASH和EEPROM能够采用普通的下载器实现下载和上载,性价比极高。
2.2 三维摇杆
三维摇杆,如图2所示,有X、Y、Z三个轴向,设计采用X、Y轴分别控制转台的方位和俯仰,Z轴控制探照灯的焦距变换。硬件设计时,三个轴向上各连接了一组由电容和电阻构成的低通滤波器,对三个轴向的控制信号进行滤波,以消除干扰和抖动。摇杆的控制角度经过模数转换与转台速度的数字量建立对应关系,实现转台速度的比例控制。此外,在电路板上设置了零值按钮,用于摇杆三维动作的零值校准。
2.3 通信模块
RS485通信方式,传输距离远,结合Modbus通信规约,可实现高效、可靠的信息通讯,本设计采用MAX485芯片作为通信模块的核心芯片,来完成控制器与控制箱的相互通信,电路图如图3所示。
3 通信协议
3.1 串口通信格式
串口通信采用RS485主从通信模式,通讯波特率为9600bit/s,数据格式为1位起始位,8位数据,1位停止位,无校验位。
3.2 协议规则
Modbus协议是由Modicon公司在1979年开发出来的网络协议,是第一个真正意义上用于工业现场总线协议。它定义了设备与设备之间的信息传输方式,使控制器之间、控制器和其他设备之间可以进行通信和传输数据。本设计采用经简化后的Modbus通信RTU模式协议。通讯命令格式,如表1所示。其中,CRC0和CRC1为CRC校验值,用于确保传输数据准确可靠。
4 软件设计
4.1 摇杆数据处理
为有效滤除脉冲噪声,保护有效数据,软件设计将多次采集的摇杆模拟量数据通过A/D转换成数字量后,又进行了中值滤波处理,中值滤波算法如公式(1)所示。
4.2 功能设计
为有效提高CPU執行程序的效率,对摇杆的数据采集、数据发送与接收等处理均采用中断执行。控制器通过A/D中断程序每隔10ms采集一次模拟量,并将其送入相应的通道进行A/D转换,转换结束中断返回并将相应数据缓存;A/D转换的通道选择由定时器2中断完成;三维摇杆的3个控制动作数据的处理及开关灯控制均在定时器1的中断程序中完成;串口数据发送由T1中断启动,待数据发送完成后,终止串口中断。
4.3 主程序
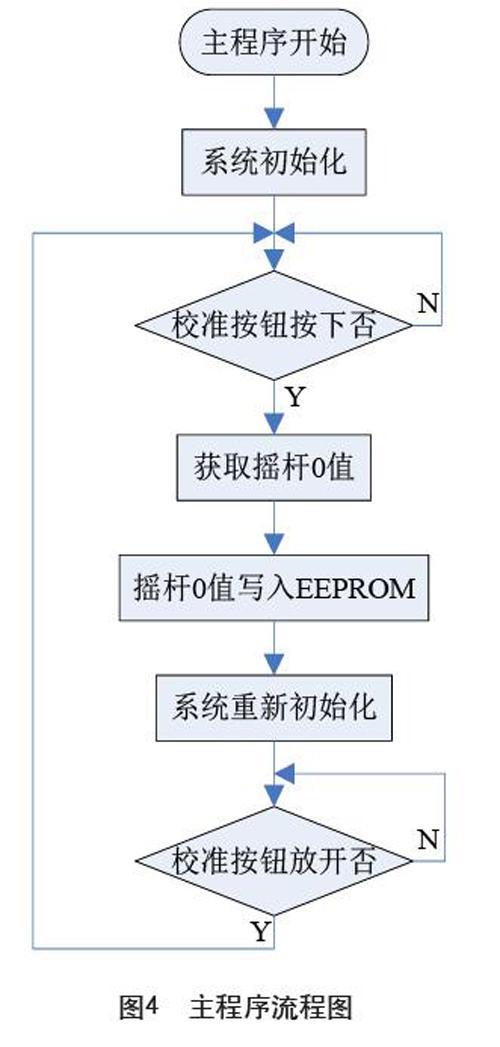
本控制器摇杆的采样、启动按钮及数据传输等过程均由中断程序处理,主程序仅对三维摇杆的零值校准进行处理。当校准按钮按下时,由主程序段处理摇杆位于复位状态下的数值,并将该值写入EEPROM,作为此后的初始值。之后,程序再次初始化,待校准按钮释放后重新进入校准按钮判断循环,主程序流程图如图4所示。
5 结语
本控制器已成功应用于某型船载探照灯转台控制系统中,经实践检验,该控制器能准确地实现转台方位和俯仰的转动控制,且可按摇杆的幅度比例控制转动速度,同时实现探照灯的开、关及焦距调节等功能,圆满完成了技术指标的要求。此外,本设计兼容了ATmega48、ATmega88芯片,还有进一步扩展功能及提升可靠性的空间。
参考文献
[1] 龙涛,张常年,李争平.基于AT90USB162的摇杆设计[J].北方工业大学学报,2012,24(3):11-16.
[2] 汪珺.基于单片机的数字摇杆控制器[J].现代经济信息,2014(21):374-376.
[3] 马潮,詹卫前,耿德根.ATmega8原理及应用手册[M].北京:清华大学出版社,2003.
[4] 刘紫燕,冯亮,詹志辉.Modbus协议RTU模式与TCP模式的通信转换设计[J].科学技术与工程,2013,13(18):5191-5196.
