残疾人用电子脚踝的设计
2018-07-27华俊阳何恩光张乐天陈雅洁张雅晶
华俊阳 何恩光 张乐天 唐 骏 陈雅洁 张雅晶
(安徽科技学院 机械工程学院,凤阳 233100)
据统计,我国目前有8500万残疾人,其中肢体残疾人所占比重最大,有2400多万人。虽然目前动力型假肢对上肢和下肢截肢者的潜在好处很明确,但多数研究和商业活动都侧重于活动上肢装置。目前,我们所见到的多数脚踝假体皆是依赖于地形的变化和人的做功,再通过假肢内的机械结构来实现人体助行。因此,他们的机械性能不随行走速度和地形的变化而产生相应变化[1]。相反,正常的人体脚踝僵硬度在每个步态周期内是随人的步行速度而变化的[2-3]。此外,研究表明,人脚踝的主要功能之一是为身体的前进过程提供足够的能量[4-5]。因此,如果想要利用假体脚踝使残疾人行走与正常人无异,则该脚踝必须具备为人体行走提供能量的功能。
1 人体脚踝工作原理
正常的人体步行生物力学为人电子脚踝的设计和开发提供了基础。平地步行步态循环通常被定义为从一只脚的脚跟着地开始,到同一只脚的下一次脚跟着地为止[6]。步态周期的主要细分是站立阶段(60%)和摆动阶段(40%),如图1所示。摇摆阶段代表了当脚离地时步态周期的一部分。可以进一步将站立阶段分为三个子阶段:受控跖屈(CP),受控背屈(CD)和动力跖屈(PP)[3]。典型的脚踝扭矩对角度如图2所示,其中,段1~2、2~3和3~4分别表示在步态的CP、CD和PP阶段的脚踝扭矩角行为。

图1 水平地面行走时正常人脚踝的生物力学
2 电子脚踝结构设计
图3展示了用SolidWorks三维建模软件设计的电子脚踝三维模型。整个电子脚踝系统由四个主要机械元件组成:大功率输出电机(Maxon RE-max40)、变速箱(减速机和伞齿轮)、串联弹簧和碳复合板簧假脚。将前三个部件组合成一个旋转系列弹性致动器(SEA),以模拟人体踝关节的行为,而弹性钢板弹簧模拟人脚的功能。SEA通过控制系列弹簧被压缩的程度来提供精确的力控制。
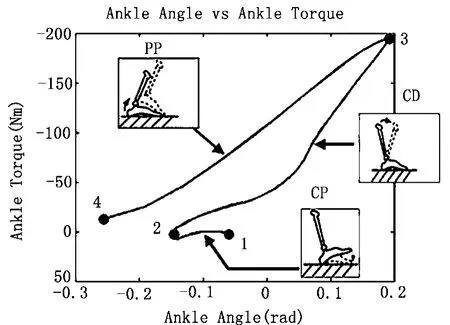
图2 水平地面行走时脚踝扭矩与角度的关系

图3 电子脚踝三维设计模型

图4 电子脚踝控制原理图
3 控制系统设计
本文设计了一个有限状态机来实现电子脚踝的基本控制系统,如图4所示。如同在正常行走中一样,电子脚踝靠线性扭转弹簧控制。在CD段中,简单地使用两个线性弹簧来近似人脚踝的非线性弹簧行为;当脚踝角度通过90°时,仿真器的刚度从一个值变化到另一个值(中等姿态)。在PP期间,除了扭矩源TPP之外,还模拟虚拟弹簧K的能量返回过程。在摆动阶段,电子脚踝被控制为具有低刚度的线性弹簧。系统的状态转换取决于脚踏开关和踝关节编码器的测量结果。
4 结论
利用人体生物力学原理设计了一种新颖的残疾人用电子脚踝来模拟正常的人体脚踝行为。通过对电子脚踝进行结构设计和控制系统设计,完善了电子脚踝的使用功能,不仅能帮助残疾人正常行走,而且兼有按摩功能,对残疾人下肢的康复保健具有辅助作用。