面向森林资源观测的成像卫星任务规划算法设计
2018-07-27刘建银王忠伟
刘建银,王忠伟
(中南林业科技大学 物流与交通学院,湖南 长沙 410004)
森林作为一个生态系统,是地球表面生态系统的主体和生物多样化的基础,它不仅能够为生产生活提供宝贵的木材原料,还能够调节气候、涵养水源、保持水土、改善土壤、净化空气、消除噪音,特别是在防止风沙、冰雹、旱涝等自然灾害方面发挥着重要作用。对森林资源进行科学管理与合理开发,可产生巨大的社会、生态和经济效益[1]。
在保护森林资源的大背景下,如何科学地对森林资源进行生态采伐是十分重要的。其中的基础和核心就是要做好森林资源的观测与统计。我国国土辽阔,森林资源丰富,截止2017年,森林总面积已超过2.58亿hm2,森林覆盖率达21.93%。与此同时,我国森林资源存在地区分布不均、南北结构差距大的特点。通过森林调查及时掌握资源状态,全面获取林业的地理、生物、生态和相关信息,是进行森林开发和生态采伐的基本前提。由于森林资源还处于不断变化之中,优选调查手段,应用先进的调查技术显得尤为重要。传统的森林资源调查方法主要使用地形图进行外业区划、采用罗盘仪和全站仪进行测距定位和测定边界、通过寻找地物绘制手图等[2-3]。
上述方法往往存在制图精度低、外业工作强度大、调查成本高、耗时周期长、人为误差大等不足。从20世纪80年代起,遥感技术、大数据等各种方法开始在林业资源调查上得到广泛应用[4-5]。其中,卫星遥感通过天基平台有效载荷对观测目标进行非接触性探测和记录,具有极大的空间探测能力和高分辨率成像能力,逐渐成为森林资源观测的高效手段[6-7],在评估森林蓄积量、监测森林火灾、识别林木类型、监视森林虫害、监测森林沙化、湿地监测等多个方面发挥重要作用。
如何高效应用有限的卫星资源实现对森林资源的成像监测是一个急需解决的重要问题。设计有效的卫星任务规划算法,合理调度卫星资源完成对森林区域的观测覆盖,是提高卫星系统资源在林业中应用效能的关键。由于森林资源所在区域较大,卫星一次过境不能完全覆盖,因此首先对卫星观测区域进行点格化分解,评估点格化效果,构建了相应的任务规划数学规模,提出一种新型的融合禁忌策略的粒子群算法求解该模型。通过仿真实验,验证了文章所提方法的有效性。
1 模型与算法
待观测森林资源的几何形状可抽象为一个由多边形或封闭曲线包含的区域,由于面积广阔,往往不能被星载遥感器的单景视场或一个扫描条带覆盖,需要进行区域分解,逐个观测后拼接成像[4]。
构建森林区域观测任务的形式化描述模型,如下所示[9-11]:

式中,Idi为任务编号;Useri为提交任务的用户中心;TSeni为所需的成像类型;STi为提交时刻;RTWi=[RETi,RDTi]为任务执行的期望时段,RETi为最早允许执行时刻,RDTi为执行截止期;PVi为任务优先级;RBi={Pi1,Pi2,…,Pik}为观测区域的顺序边界点坐标序列,Pik=(pxik,pyik)为边界点Pi的地面坐标。
观测任务由不同用户提交至卫星管理中心,为便于统一规划,应根据任务描述进行预处理(点格化),主要步骤如下:
(1)计算卫星成像载荷的单景视场范围,作为点格化区域的大小;
(2)将任务区域与单景视场范围大小进行比较,作为挑选待分解对象的依据;
(3)针对待分解对象,通过点格分解算法构建点格化区域;
(4)判断任务区域的点格化覆盖情况,并生成任务对象的子任务集。
1.1 单景视场计算
森林资源观测卫星通常在近地轨道上稳定运行,卫星位置随着时间的变化发生移动。在任意时刻卫星位置与地球质心连线与地球表面的相交点称为星下点[12-14]。由连续星下点构成的弧线称之为星下点轨迹,如图1所示。
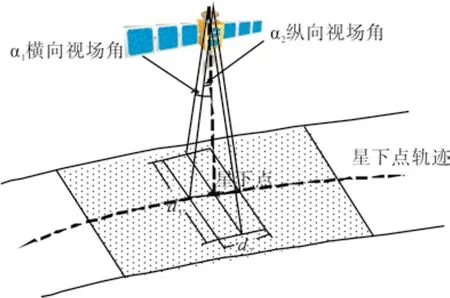
图1 成像卫星的星下点轨迹Fig. 1 Ground track of imaging satellite
成像卫星通过有效载荷对森林资源进行观测,其观测区域由星下点位置和成像载荷的视场范围确定[15-16]。成像载荷的单景视场范围可根据视场角计算,如图2所示。计算单景视场范围的方法如下:

图2 成像卫星的单景视场范围Fig. 2 Single view field range of imaging satellite
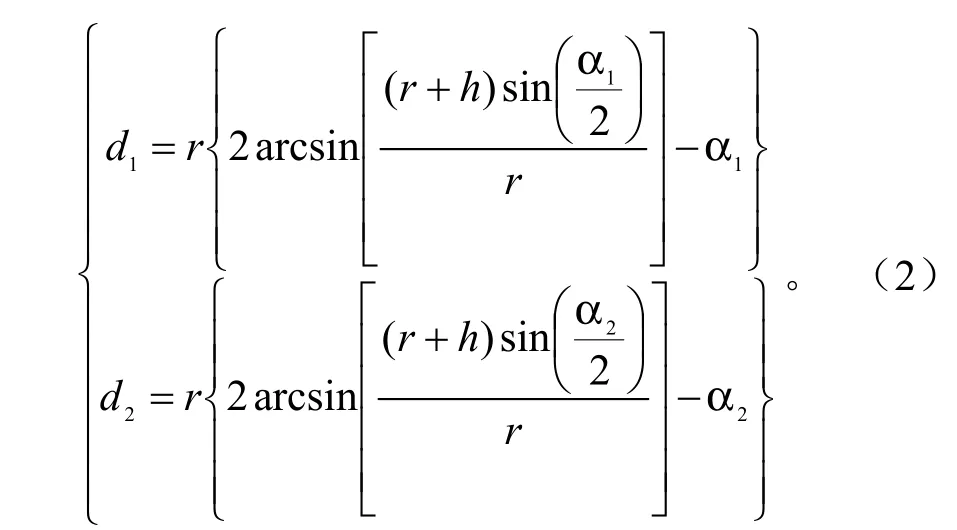
式中,d1,d2是单景视场区域的长和宽;r为地球半径;h为成像卫星的轨道高度。
1.2 任务区域计算
设taski为待观测森林区域任务,由其任意边界点Pim,Pin,Pip∈RBi构成的覆盖区域面积为:
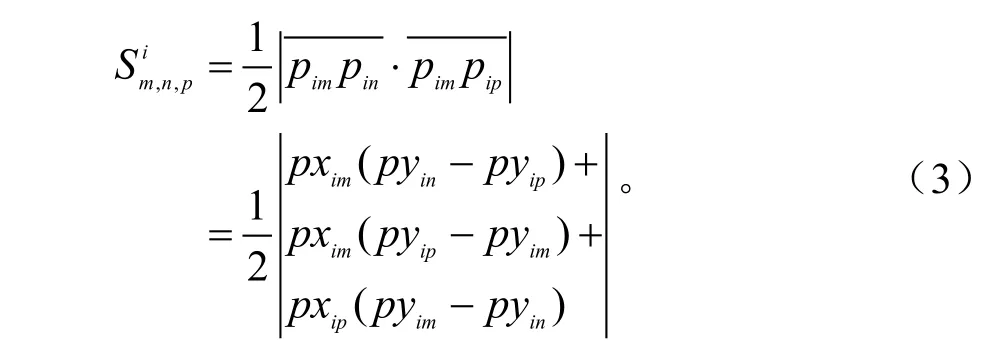
由式(3),taski的覆盖区域面积可表示为:

式中,Ni为taski边界点数量。
1.3 区域点格化分解
将观测范围大于单景视场范围的任务区域,按照成像卫星载荷的单景视场尺寸切割为多个互不相交的点格,如图3所示。
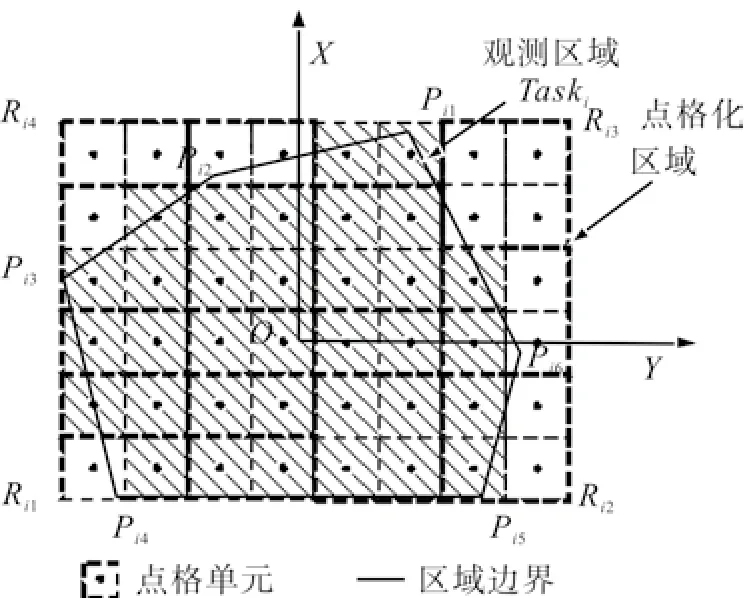
图3 任务区域的点格化效果Fig. 3 Grid partition effect of task area
在图3中,以点格单元的中心点代表点格所在区域。若某个点格的中心点可被成像卫星观测到,则认为其代表的整个点格区域都被观测到。通过点格化处理,可将区域目标观测问题转换为点目标集合观测问题。
对于待分解任务taski,为其构建点格化区域,不妨令:

估算点格数量:
点格化区域的初始点坐标为:构建点格单元的中心点集合:其中:



1.4 点格覆盖效果评估
从点格化区域中挑选出覆盖任务区域的点格单元,作为任务分解后的子任务。对于任务点格单元的中心点判断其是否覆盖于任务区域内的主要步骤如下:
Step 2:设Pi1和Pi2的中点为Oi12,作至Oi12方向的射线
式中,Ei越大说明点格化区域设置与任务区域越匹配;Ei,2越小说明点格单元分布对任务区域的覆盖效果越好。
1.5 任务规划模型构建
经过分割处理后的任务均为可一次性观测的独立子任务,对于当前调度事件为slnow,不妨将生成的所有子任务和无需分割的原任务重新标记为:式中,TN为任务集合中的元素数量。

任务集合通过集中规划生成资源分配结果,而整个调度过程可分解为由若干调度事件构成的调 度 序 列表示第i次调度事件占用的时段。
设成像卫星资源集合为:

式中,SN为卫星集合中的元素数量。
将Satk携带的载荷类型标记为SSenk,Satk对taski的可视窗口集合记为VTWSi,k。表示在sli中向用户追加释放Satk的可用时段,其中FTBegini,k, FTEndi,k分别为FTWi,k的开始时刻和结束时刻。
对于当前调度事件为slnow,向用户累计释放的Satk可用时段为:

i,j=0。若taski可执行,设其为分配的执行时段为执行资源为ESati。
构建成像卫星任务规划问题的优化目标函数,如下所示:
其中,Q为决策变量X的可行域。
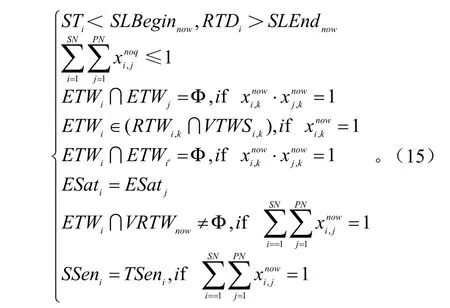
对于Tasknow中的任务,在调度过程中应满足以下约束[17-18]:
1.6 任务规划算法设计
在现有研究成果中,群智能算法被广泛应用于成像卫星任务规划问题的求解。其中,粒子群算法(Particle swarm optimization,PSO)以实现容易、精度高、收敛快等优点在解决实际问题中展示出其优越性。PSO算法的基本步骤如下:
Step 1:初始化种群,设定种群规模和个体进化规则;
Step 2:对初始化种群中的每个粒子进行适应度评估;
Step 3:更新种群信息
Step 3.1:对于每个粒子,将其当前搜索位置的适应度与个体最优位置的适应度比较,若更好,则将当前搜索位置作为个体最优位置;
Step 3.2:检查所有粒子的搜索位置,若存在优于种群历史最优位置的情况,将出现的更优搜索位置作为种群历史最优位置;
Step 4:计算各粒子的移动速度和方向,从而更新粒子的搜索位置;
Step 5:如果搜索过程达到预先设定的终止条件,算法结束;否则,返回Step 2继续迭代。
为克服基本PSO算法存在的搜索精度不高、易陷入早熟等不足,本文将具有全局搜索能力的禁忌搜索策略和遗传算法中的交叉进化策略嵌入至基本PSO算法中,作为面向森林区域覆盖观测的成像卫星规划算法。
(1)禁忌搜索策略
为避免迭代过程中出现迂回搜索,防止过早陷入局部最优,在每次迭代时记录最近接受的历史最优解信息,在一定次数内禁止粒子再次访问该搜索位置;超过一定次数后,禁忌对象被解除,可重新访问。禁忌表的设计包括三个要素,即禁忌长度、禁忌对象和特赦规则。
所谓禁忌对象就是禁忌表中的元素,而禁忌目的是为避免搜索循环。本文将各子群每次进化时的精英粒子位置作为禁忌对象,搜索粒子应避免朝着禁忌对象相同的位置移动。
禁忌长度通常指禁忌表的规模,即表中可存储元素数量。为不影响搜索速度,节省存储空间,禁忌表中仅保存单个元素。
将禁忌对象从禁忌表中移出称之为特赦,本文考虑两种特赦情况:一是当禁忌对象经历的迭代次数到达预定阀值;二是有其它满足禁忌特征的粒子替换当前禁忌对象。
(2)交叉进化策略
对于弱势子群的度量,可在每次迭代后,将各子群按其最历史优解的适应度排序,然后以适应度处于后半部分的子群作为弱势子群,与处于前半部分的强势子群交叉基因,改善种群质量。
算法采用双点逆转方式实现交叉操作,首先随机选择断点,将粒子信息划分为前、中、后三部分。在交叉时,仅保留父代1(Parent 1)的前部分,而将中间部分逆转,再结合父代2(Parent 2)的后部分,形成子代1(Child 1);同理,保留父代2(Parent 2)前部分,将其中间部分逆转,并结合父代1(Parent 1)后部分,形成子代2(Child 2)。
(3)粒子搜索方式

第r个粒子在第t次迭代时的移动速度为:

第r个粒子在第t次迭代时的最优位置为:

此外,描述种群在第t次迭代时具有的种群历史最优位置为:

粒子的搜索位置和移动速度采用以下方式进行迭代:

式中,F为种群规模;r1,r2∈[0,1]为均匀分布随机数;为移动速度;c1,c2为学习因子;w为惯性系数。
2 仿真实验结果与分析
为验证本文所提算法的可行性,我们利用卫星工具箱(Satellite tool kit,STK)搭建仿真场景,并基于MATLAB R2012b进行仿真驱动。
首先在STK场景中随机产生若干个待观测区域,并生成相应的任务参数,然后采用文中的点格化方法进行预处理,效果如图4所示。
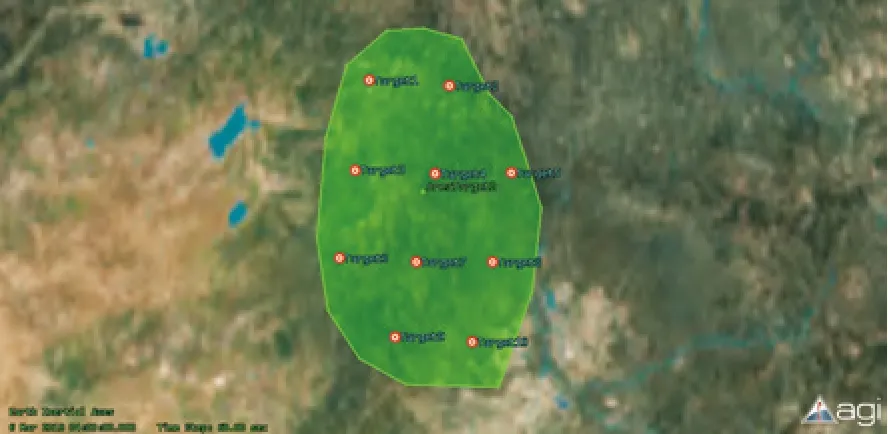
图4 待观测区域点格化效果Fig. 4 The point grid partition effect of observation area
对点格化效果进行评估,挑选出品质较好的观测区域作为测试对象,其中部分数据如表1所示。
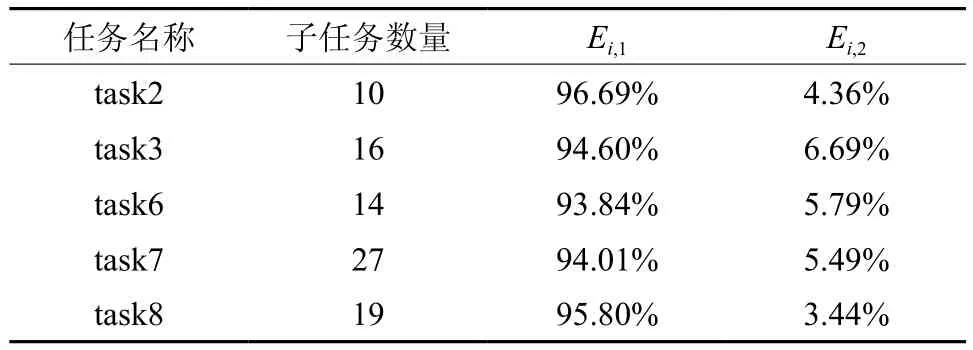
表1 测试对象的点格化效果Table 1 The point grid partition effect of the test tasks
将经过预处理后生成的子任务作为待规划任务集,模拟3颗对地成像卫星,设置轨道根数如表2所示。
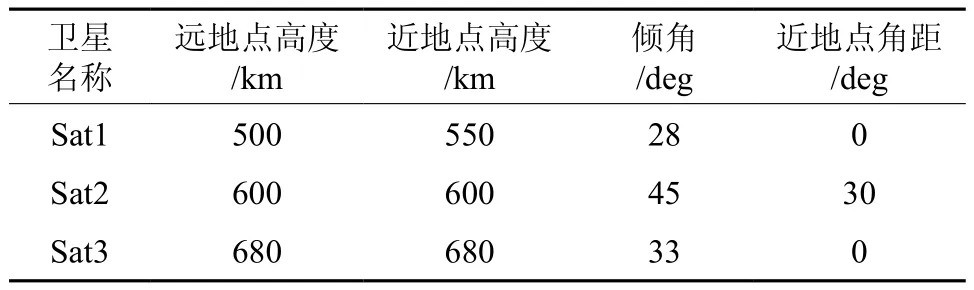
表2 成像卫星的部分轨道根数Table 2 The orbit parameters of imaging satellites
采用IPSO算法进行优化求解,设置初始种群规模为35,初始移动速度为[0.1,0.7]间的随机数,学习因子取2,惯性系数取0.8,构造适应度函数为:

设置进化代数为30,将IPSO算法的计算结果与PSO算法进行对比,如下所示:
由图5可知,在本文构建的测试场景中,IPSO算法获取的优化解好于PSO算法。虽然在初始种群构造中,两种算法获取的解质量相当,但在后续迭代中,IPSO算法快速向高质量优化解方向搜索,并在迭代周期的1/3~2/3区间内获取种群的近似最优解。上述结果说明,加入忌搜索策略和交叉进化策略的IPSO算法能够兼顾搜索质量和搜索速度,具备较高的优化效率。
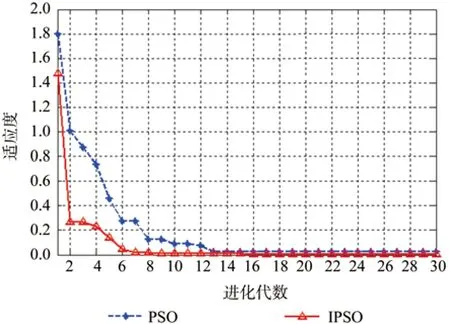
图5 不同优化算法迭代过程对比Fig. 5 The comparison between the iteration processes of different algorithms
3 结论与讨论
以森林区域覆盖观测为需求,研究了成像卫星任务规划方法。考虑到森林区域面积广阔,通常需要多次成像才能完成观测,提出森林区域观测目标的预处理方法,采用点格化方式实现区域状目标向点状目标的转换,详细介绍了点格化的步骤和依据。在此基础上,分析了成像卫星对地观测约束条件,构建出任务规划数学模型。针对模型求解的复杂性,设计了粒子群算法对模型进行求解。为了进一步提高粒子群算法的性能,在其中创造性融入了禁忌策略和交叉策略。通过仿真实验和对比分析,验证了文中所提算法的有效性。相比于传统粒子群算法,融合禁忌与交叉策略的粒子群算法可以在更短的时间内收敛到质量更高的解。本文所提方法对高效应用稀缺卫星资源实现对森林区域的成像侦察具有重要意义,可为评估森林储量、监测森林灾害、判别林木类型、监测林地沙化等多个方面提供支持。
在后续的工作中还需进一步研究动态环境下的云层遮挡、资源失效等,面向森林资源观测的成像卫星任务规划方法,提高观测过程的鲁棒性与适应性。另外,如何协同无人机、飞艇、地面传感器等异构平台实现对森林资源的高效观测覆盖是一个值得研究的前沿课题。
