动态RFID系统中一种准确标签估计的动态帧时隙ALOHA算法
2018-07-24李晓武
王 达, 李晓武
(1. 湖北工业大学 太阳能高效利用湖北省协同创新中心, 湖北 武汉 430068; 2. 昆明理工大学 信息与自动化学院, 云南 昆明 650504; 3. 湖北工业大学 湖北省电网智能控制与装备工程技术研究中心, 湖北 武汉 430068)
RFID技术是一种远程数据录入技术,该技术能够较好地提高物流、超市、工厂的工作效率,RFID有如下特征:非接触性,UFH超高频阅读器识别距离能够达到1~15 m,甚至更远;快速识别性,在多标签环境下,大部分超高频阅读器的识别速度已经达到每秒识别100甚至更多的标签,远远超过条码的识别速度;较强的环境适应性,RFID能够抗冲击、振动、电磁、温度和化学腐蚀影响。
通常在射频通信系统中,阅读器和标签的通信是通过共享无线信道来实现的,当多个标签同时响应阅读器就会发生标签碰撞,阅读器不能正确读到任何信息,我们把这种现象称之为标签碰撞问题,标签碰撞使得阅读器的读写速度大幅度降低。为了避免碰撞问题的发生,防碰撞协议是非常有必要的,好的防碰撞协议能够有效提高阅读器的标签识别效率[1]。标签识别效率也可以称作吞吐量,是指单位时间(如时隙)内阅读器识别标签的数量[2]。迄今为止,传统标签识别环境(静态场景)下的防碰撞协议研究已经比较成熟,这些协议可以分为两类:随机算法和确定算法[2-3]。通过这些算法,静态场景下的标签碰撞问题能够得到较好的解决,静态场景下的标签识别效率能够达到90%[3]。静态场景下比较常见的协议类型是动态帧时隙ALOHA算法,该算法属于随机算法,当帧长等于未识别标签数时,标签的识别效率最大[4]。
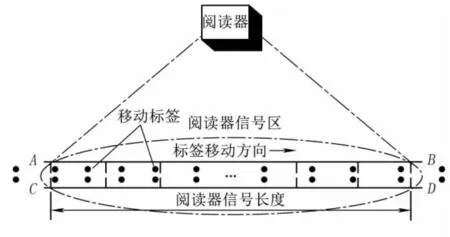
RFID应用中还一类应用场景,在该场景中,标签附着在目标的表面并沿着阅读器信号区内的固定路径移动,这种场景被称为动态RFID系统[4-5],动态RFID系统经常出现在物流的出入口。在动态RFID系统,标签持续性的进入和离开信号区,动态RFID系统的概念图见图1。图1中,阅读器在标签移动路径的上方,阴影部分是阅读器的应答区域,简称阅读器信号区,标签沿着直线AB和CD中间的轨道移动,标签从左边进入信号区,从右边离开信号区。根据标签的移动速度、阅读器的长度可知标签通过信号区所花费的时间,以上描述的场景是本论文要研究的场景。
和静态场景RFID系统相比较,动态RFID系统的特点是:
(1) 标签的可移动性。在识别过程中,标签是可以移动的,阅读器能够对移动标签进行识别。
(2) 标签逗留的短暂性。标签在阅读器信号区内逗留时间是有限的,这和标签移动速度、信号区长度有关,标签在进入信号区前或离开信号区后,阅读器不能识别标签,标签只有在阅读器信号区内才有机会被识别。
(3) 标签的丢失性。由于标签的可移动性和标签逗留的短暂性,标签可能没有被识别就离开阅读器的信号区,这种标签称之为丢失标签,在动态RFID系统中,减少标签丢失是最重要的工作。评价动态RFID系统重要的性能指标不再是标签识别效率,而是标签丢失率TLR,其定义为
( 1 )
标签丢失率TLR有如下特点:
(1) 当未识别标签数密度过大时,标签的丢失率会增加,如果标签密度过大,标签丢失不可避免,为减少标签丢失率,减小标签密度是必要的,实际应用中,有时标签密度不可调整,如贴有标签的商品已经装入卡车中。
(2) 标签移动速度过快,标签丢失率会增加。如果标签移动速度过快,标签丢失不可避免,为减少标签丢失率,减小标签移动速度是必要的,当标签密度不可调整时,调整标签移动速度就变得很重要。
尽量降低标签丢失率是动态RFID系统的重要任务,一般要求标签的丢失率尽可能低[5]。为了降低动态RFID系统的标签丢失率,需要对原有的标签识别协议做改进,本文主要对广泛使用的动态帧时隙协议做改进,这种改进主要体现在协议中的帧长调整算法,改进后的协议优点是:
(1) 考虑了当前帧识别结果对标签识别的影响。
(2) 考虑了新进标签对标签识别的影响。
(3) 考虑了部分未识别标签离开阅读器的信号区对标签识别的影响。
(4) 可以用来改进动态帧时隙算法,使其能够适应动态RFID系统。
由以上优点可以看出,改进的协议综合考虑了影响帧长的诸多因素,和传统的动态帧时隙ALOHA算法相比,帧长的估计更适合于动态RFID系统。
1 相关工作
目前,关于如何准确确定动态RFID系统的标签识别方法的研究不多,文献[6]通过路径损耗和多路径效应等物理参数来判断标签的数量,但这并非本文研究的重点。
对于静态场景下的RFID标签的防碰撞协议已经研究的比较成熟[7-12],本文首先说明一种经典的随机型标签防碰撞算法Vogt-DFSA[11],该算法为本文所提协议的基础算法,了解了Vogt-DFSA协议及其改进算法,有助于实现其他经典及高效协议,Vogt-DFSA协议的步骤如下:
Step1在帧循环开始时,阅读器对信号区内的所有标签广播一个请求命令“Query”,该命令包括一个动态帧长参数L。
Step2信号区内所有收到“Query”命令的标签随机选择一个0到L-1的时隙,然后在选择的时隙传输其ID给阅读器。对于任意时隙,根据传输的情况,时隙分为空闲、成功及碰撞时隙3种。空闲时隙指的是没有任何标签选择该时隙传输其ID给阅读器。成功时隙是指只有一个标签选择该时隙传输其ID。碰撞时隙表示有两个或两个以上标签选择该时隙传输其ID号。
Step3当一个帧所有时隙都处理完,假如出现E个空闲时隙,S个成功时隙,C个碰撞时隙,并且E+S+C=L。根据概率论如果碰撞时隙数C较大,可以判断帧长设置过小,相对帧长而言,未识别标签数过多。如果空闲时隙E较大,说明帧长设置过大,相对帧长而言,未识别标签数较少。因此帧结束后根据当前识别状况(如碰撞数、成功时隙数、空闲时隙数)重新设置帧长是有意义的,可以减少碰撞或空闲时隙的大量出现。帧长设置的原则是当帧长等于未识别标签数时,标签的识别效率最优。一种简单的调整帧长方案为[11]
L=2.39×C
( 2 )
如果当前帧没有出现碰撞,标签识别处理结束;否则执行Step1。式( 2 )假设的是未识别标签数等于碰撞数的2.39倍。
以上是静态场景下动态帧时隙ALOHA算法设计的主要步骤和构想,帧长调整的主要目标是使得帧长大小等于未识别标签数,并且帧长调整主要依靠帧结束后的碰撞数、成功时隙数、空闲时隙数进行判断[7-9]。
对于动态RFID系统,如果只依靠帧结束后的碰撞数、成功时隙数、空闲时隙数来调整帧长是不合理的。因为在动态RFID系统一帧执行完后,未识别标签数由新进标签和当前帧引起碰撞时隙的部分标签组成。为了分析在动态RFID系统中未识别标签数,假设:
(1) 标签的流量等于tra,单位为标签/时隙。假如标签流量tra等于0.8,意味着一个时隙只有0.8个标签进入信号区,这样规定标签流量的单位有利于分析动态RFID系统的性能。
(2) 标签的帧长用L来表示,单位为时隙。
(3) 标签的逗留时间用Dcov表示,单位为时隙,意味着标签通过阅读器信号区需要Dcov个时隙,超过Dcov时隙,标签将离开阅读器信号区。
(4) 一帧结束后,阅读器能统计到E个空闲时隙、S个成功时隙、C个碰撞时隙。
基于以上假设和分析,当前帧识别过程中,新进标签数nnew为
nnew=tra×L
( 3 )
当前帧识别过程中,碰撞标签也属于未识别标签,碰撞标签导致的未识别标签数nc为
nc=2.39×C
( 4 )
本文中采用碰撞时隙数的2.39倍作为参与碰撞的标签数量[11]。因为碰撞标签与新进标签相比,比较接近信号区的出口,部分碰撞标签可能没有等到下一帧的识别就离开阅读器信号区,为了便于理解,图2为前后两帧信号区内未识别标签的分布情况。

图2(a)为帧识别前的未识别标签分布情况,图2(b)中,虚线左边为帧识别过程中进入信号区的未识别标签分布情况,虚线右边为参与帧识别后的未识别标签分布,这些未识别标签是由于标签碰撞产生的。可以看出,当标签流量恒定时(这是本文的研究场景),新进标签的标签密度更大,而已参与帧识别标签的标签密度更低。因此,虚线左边的标签密度大于虚线右边的标签密度,并且,虚线右边的标签又分为两份,其中,虚线右侧和信号区右边界左侧的标签是未离开信号区的碰撞标签;信号区右边界右侧的标签为离开信号区的未识别标签。

( 5 )
根据以上的分析,一帧后未识别标签数nui或新帧长L′应设置为
( 6 )
当标签识别处于开始阶段(见图3),图3(a)表示阅读器刚开始识别标签,信号区内未识别标签数量只分布在信号区的左边,图3(b)显示一帧执行完后,前一帧剩余未识别的标签分布在虚线右边,并且没有碰撞标签离开阅读器的信号区,因此,式( 6 )应改变为
L=nui=tra×L+2.39×C
( 7 )
式( 7 )的使用条件为
∑L(i) ( 8 ) 式( 8 )所给条件表示识别的起始若干帧长小于标签的逗留时间Dcov时,帧长调整采用式( 7 ),否则帧长调整采用式( 6 )。在本文中不讨论标签识别末期没有新标签进入信号区的情况,这是因为采用动态帧时隙ALOHA算法识别标签的阅读器不能检测是否有新进标签进入。 动态RFID系统中考虑新进标签动态帧时隙ALOHA协议(以下简称DFSA-CN协议)的步骤为: Step1在帧循环开始时,阅读器对信号区内的所有标签广播一个请求命令“Query”,该命令包括了一个动态帧长参数L,初始帧长设置为128。 Step2信号区内所有收到“Query”命令的标签随机选择一个0到L-1的时隙,然后在选择的时隙传输它的ID给阅读器。 Step3当一个帧所有时隙都处理完,根据前文分析调整下一帧的帧长,调整算法为 ( 9 ) 如果当前帧的成功时隙数和碰撞时隙数的和为0,标签识别处理结束;否则执行Step1。 Step4阅读器识别结束的条件是成功时隙数和碰撞时隙数之和为0,因为在标签流入信号区流量恒定的条件下,在一帧结束后,成功时隙数和碰撞时隙数之和大于0,只有当标签流入信号区为0时,才会出现成功时隙数和碰撞时隙数之和为0。 从以上的算法可见,当一帧结束后,DFSA-CN协议将会考虑新进标签和未识别标签离开信号区对帧长的影响,这就是该协议与原有DFSA协议的关键不同点。 为了评估本文所给协议的性能,把DFSA-CN和经典的动态帧时隙ALOHA协议(DFSA)进行比较,通过变化标签流量tra、标签逗留时间Dcov和初始帧长L三个角度分析它们对两种协议标签丢失率TLR的影响。本文仿真采用蒙特卡洛方法,仿真不考虑阅读器对标签发送指令所耗费的时间,只考虑标签向阅读器发送信息所耗费的时间(用时隙来表示),因为RFID系统通信的主要时间损耗发生在标签向阅读器发送信息的过程中。 在图4(a)为tra变化对标签丢失率TLR的影响,该仿真实验环境参数为:Dcov=1 000时隙,L=32时隙。仿真中,流量的单位是每时隙有多少个标签进入阅读器信号区内,如当标签流量为0.5时,这表示一个时隙内有0.5个标签进入阅读器信号区,即两个时隙有一个标签进入信号区,从该仿真可见: (1) 随着标签流量tra的增加,两种协议的标签丢失率都在增加,因为在相同的时间内进入阅读器信号区的标签数量更多,导致标签丢失较多。 图4(b)为Dcov变化对标签丢失率TLR的影响,该仿真实验环境参数为:tra=0.8标签/时隙,L=32时隙。在该仿真中,标签逗留时间单位是时隙,由图4(b)可见: (1) 随着标签逗留时间Dcov的增加,两种协议的TRL缓慢降低,降低速度较慢,因为随着标签逗留时间增加,阅读器有更多机会识别碰撞标签,而TRL降低缓慢的原因是标签进入信号区的流量没有改变,标签流量的变化是标签丢失率变化的主要因素。 (2)在相同的标签逗留时间Dcov条件下,DFSA-CN的标签丢失率小于DFSA的标签丢失率,如在标签逗留时间为2 000时隙时,DFSA-CN丢失率为0. 206 1,而DFSA的标签丢失率则为0.266 4,这是因为DFSA-CN协议考虑了新进信号区标签和离开信号区标签对标签识别的影响。 图4(c)为L变化对标签丢失率TLR的影响,该仿真实验环境参数为:tra=0.5标签/时隙,Dcov=1 000 时隙。仿真中帧长单位是时隙,由图4(c)可见: (1) 随着初始帧长L的增加,两种协议的标签丢失率TRL先降低后增加,这是因为太小的帧长,将导致碰撞较多,这会增加标签的丢失率。同样帧长太长将产生过多的空闲时隙,这也会增加标签的丢失率。 (2) 在相同的初始帧长L条件下,DFSA-CN的标签丢失率小于DFSA的标签丢失率,如初始帧长为128时隙时,DFSA-CN丢失率为0.238 3,而DFSA的标签丢失率为0.296 9,因为DFSA-CN协议考虑了新进信号区标签和离开信号区标签对标签识别的影响。 图4的仿真结果从3个角度分析了DFSA-CN协议的性能,这些仿真都显示本文所给协议DFSA-CN具有更优良的性能,即在相同的条件下,DFSA-CN的标签丢失率都低于DFSA。 本文对动态RFID系统进行了深入分析,并给出适合动态RFID系统的DFSA-CN协议,文中分析了动态RFID系统未识别标签的新进标签、碰撞标签组成部分,一帧结束后新标签进入信号区的数量,一帧结束后离开信号区的碰撞标签数量。由于所给协议DFSA-CN能准确确定未读标签的数量,从而给出了较为合理的帧长函数。本文调整帧长的思路可以用于改进大部分动态帧时隙ALOHA协议的标签估计算法。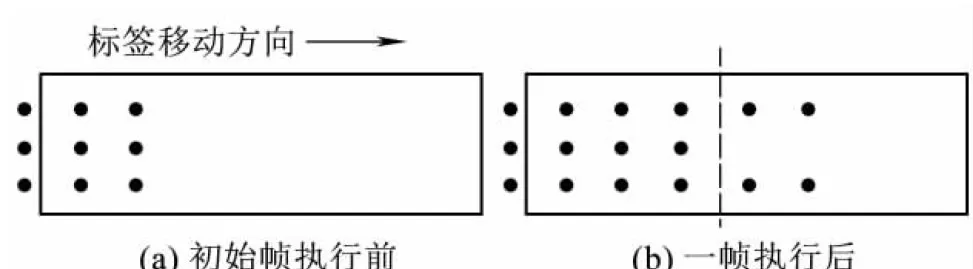
2 动态RFID系统中一种考虑新进标签动态帧时隙ALOHA协议
3 仿真和结果


4 结束语