城市中心区干道变速双向绿波带
2018-07-13吴中李垣君李婧
吴中 李垣君 李婧

摘 要:城市干道交通量的增長使人们对干道协调控制的要求提高,而传统的双向绿波带方法常遇到带宽过窄,带速过高等不利情况,难以应用到双向交通拥挤的城市干道。本文改变以往绿波带速不变的设定,提出一种变速的双向绿波带控制方法和与其对应的橡皮筋模型,可简便地求解双向绿波带各路段变化的交通流速度。在最小变速约束解的基础上,对该模型进行速度控制的功能性优化以提高行车和交通安全性,并以南京水西门大街为例,利用VISSIM仿真比较分析变速双向绿波的优势。
关键词:变速双向绿波;橡皮筋模型;恒速通过交叉口模型;交通仿真
中图分类号:U491.5
文献标识码: A
城市干道绿波协调控制具有实现简单、控制效果明显等特点,潮汐绿波带、单向绿波带在城市交通中应用较为广泛。随着城市交通需求的增长,城市中心区干道承受的交通负荷加重,上下行交通量方向系数趋近0.5。单向、潮汐绿波带难以高效协调好干道交通的双向通行,对双向协调的干道绿波控制有迫切需求。双向绿波带[1-2]通过传统图解法、数解法虽可能实现双向绿波,但随交叉口数量增加,交叉口间距不等或不呈倍数关系,易出现绿波带宽窄、带速过高,甚至无法划出绿波带的情况。为照顾干道主流方向双向线控优化,还可能会增加横向道路交通延误。提高主干道通过能力,合理兼顾横向道路车辆通行,对改善城市中心区路网通行能力有重要意义。
为解决传统双向绿波带宽窄的问题,2008年5月,张文义、张业炜等(指导老师吴中)在全国大学生交通科技大赛中提出变速双向绿波带的初步设计方案并获二等奖;常玉林等[3-5]以通过交通调查先确定带速和周期,再协调控制系统的相位差的方法对双向绿波图解法进行改进;陈昕等[6-8]提出了基于绿波带中心线交点的双向绿波控制图解法。针对现有的数解算法假定绿波设计速度固定取值的局限,唐克双、孔涛等[9-10]提出一种改进的MULTIBAND干线协调控制模型和非对称式绿波的概念;舒毅、吴中[11]提出采用路侧排灯诱导的方式使驾驶员依预设信号自行变速,提高了绿灯利用效率、增大设计带宽;荆彬彬、鄢小文等[12]提出了一种基于双向最大绿波带宽的通用干道协调控制数解算法。上述成果主要集中在改善或增大干道绿波带宽上,研究中较少考虑横向交通需求对绿波带设计的约束与影响,其成果应用多少也存在着局限性。本文继承变速双向绿波带思想、参考文献[11],按照进口流量比合理分配绿灯时间,提出“橡皮筋模型”和“变速双向绿波的恒速通过交叉口模型”及其设计与求解方法,仿真结果表明变速双向绿波带可以提高干线的通过能力。
1 变速双向绿波带设想
城市中心区干线双向绿波设计的主要困难是横向交叉口密度大、交叉口间距不一,常规双向绿波难以实现。一般而言,常规双向绿波带通常建立在车流恒速的基础上,控制路段上要求的双向车流几乎同时到达同一交叉口的条件过于苛刻。各类精细的优化算法虽然在理论上可以部分提高干道双向通过能力,但算法产生的交通“效益”大多需要交通流特性“配合”,实用性与可操作性可能都难以保证。如果能让双向交通流按预设的优化方案在预定的时空上变速,则可以解决绿波中上下行双向交通流同时到达同一交叉口的问题,同时也解决了传统双向绿波带宽可能过窄的问题。
变速的控制可以采用路中隔离护栏上设置排灯的方法[11]、灯距约5~7 m(相当于pcu有效车长)或更短。每只排灯为两面可变红绿双色灯、与干道纵线呈45°夹角、安装可适当架高,高度以双向交通车辆都可以看到已方一面灯光信号为宜。
在干道同一行车方向上,排灯信号分为绿灯组与红灯组。红绿灯组信号由若干个相邻的红色或绿色的同色排灯组成。工作时,整个控制路段的排灯由红色灯组与绿色灯组相间布设,交通控制由红绿信号灯组依次整组同步向前移动完成,灯组移动速率由电子逻辑电路控制。当绿灯组头灯信号到达交叉口时,会适时正逢交叉口绿灯亮;当绿灯组尾灯信号离开交叉口时,交叉口红灯或黄灯适时点亮。交叉口的信号灯既有传统的独立功能,又被设计成与路中排灯协调工作。由于排灯组信号移动速率是可变的,不同行车方向上排灯信号移动虽然表面上工作独立,但却可保证上下行绿灯组同时到达和离开控制段每一个交叉口。双向车流只要跟随路中绿灯组移动速度和指示位置行驶(车辆不超越绿灯组),即可一次顺利无阻地通过干道控制段若干个红绿灯交叉口。事实上,车流在双向绿波控制段是由绿灯组“引领”行驶的。
2 变速双向绿波设计
2.1 变速双向基本模型
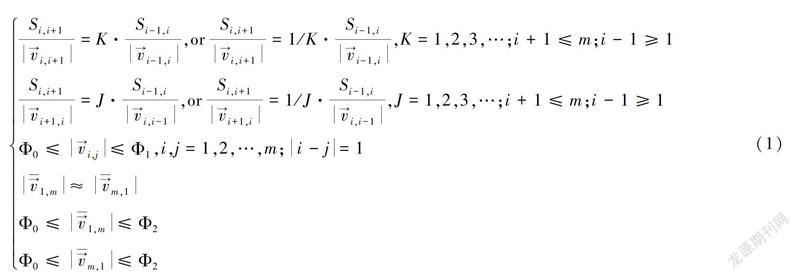
变速双向绿波带设计的关键为上下行方向各路段流速,设定两交叉口间路段车流速度不变。双向各路段变速问题可以归结为下列数学模型:
式(1)中,Si,i+1为交叉口i到i+1交叉口间的实际路段长度;v→i,i+1为交叉口i到i+1间的设计车速矢量;Φ0、Φ1和Φ2分别为路段、绿波段总路段设计车速的上下限速度值;K和J为非零倍数参数,当各路段长度相差较大时增大倍数参数调节路段设计车速;i、j为交叉口编号,m为交叉口数。式(1)中方程表达了除端点交叉口外的所有交叉口上下行车流必须同时到达交叉口;约等式方程约束了上下行车流平均流速在整体绿波总路段区间要大体相等,但这条约束比较弱,可根据实际情况放宽。模型(1)表达了双向变速对相关参数的基本要求。
2.2 “橡皮筋模型”和求解方法
由于模型(1)约束条件少,存在着无限多组满足条件的解,采用传统的方程组解法显然不能解决实际问题。双向绿波且交通流速恒定当然是最好,以变速满足双向绿波也是条件所迫的无奈选择。因此为了优化模型(1),还需寻找某种未知的最小“成本”的变速约束条件,以定解求解变速代价最小的那组最佳解。模型(1)的等价模型和求解方法采用所谓的“橡皮筋模型”及其求解方法,举例说明。
以相邻5个交叉口为例,从假定的各路段等距条件出发,以给定设计基准车速v和m个交叉口间总线路长度为已知条件,建立有周期变化特性的空间-时间(S-t)图(图1(a))。将图中交叉口位置表示信号相位变化的水平平行横线看作是“刚性杆”;刚性杆间斜率代表车速的斜线看作是“橡皮筋”,橡皮筋与刚性杆固定连接。当刚性杆垂直移动到实际交叉口位置上时,原先设定的等距路段交叉口就转变为不等距交叉口。此时橡皮筋仍然张紧,它的斜率就是实际不等距交叉口间路段的车速(此处选择K=1,J=1)。由于刚性杆从最小变速状态位置(等距交叉口各路段恒速)垂直移动而来,可以在S-t图(图1(b))上用反证法证明,此时橡皮筋斜率所代表的速度是交叉口位置约束条件下的最小变速。用刚性杆和橡皮筋可以完美地描述任意路段长度的车速变化问题,刚性杆和橡皮筋组成的模型称为“橡皮筋模型”,它可以求解双向车流变速并同时到达交叉口的问题。将图1(b)的速度折线适当加粗,即为双向绿波约带宽。由于绿波带宽确定有较大的可调空间,“橡皮筋模型”可以较好地解决交叉口横向交通的绿灯时间分配问题。
模型的解也明确表明,在相邻交叉口间路段车流恒速条件下,寻找的“最小变速约束条件”是指双向变速度与等距交叉口恒定速度差的最小残差平方和,双向的残方差和S1与S2可以表达为:
2.3 变化的车头间距与车队总长
由于车变速会产生车头间距变化,车队在不同速度下的总长度也不尽相同。这需要根据交通基本图计算不同速度下的车头间距和车队总长,并适时调整绿灯组的灯数(长度),以适应车队长度的变化,确保一波绿灯组车辆能够在一个绿灯组内全部或基本全部一次连续不停通过绿波带,以减小对下一波绿灯组的影响。控制中,绿灯组在不同行车区间的长度是会“伸缩”的。这也从另一方面限制了波绿时空上的带宽过度增大(绿灯组伸长不能过度压缩红灯组,影响其它行车方向带宽),但仍比传统双向绿波“宽裕”很多。绿灯组在不同行车区间的长度 “伸缩”量可能还应考虑交叉口横向道路转入主干道的转弯交通量的影响(与交叉口信号灯相位设计、OD有关),这在本文中不深入讨论。
2.4 交通波与恒速通过交叉口模型
当车队在变速点变速时,很可能会产生交通波,特别是后向波的传递会影响后车的预定行车速度。“橡皮筋模型”将变速点设定在交叉口,既不利于车队快捷通过交叉口,也不利于车辆在交叉口的运行安全。可在“橡皮筋模型”的解算基础上,固定各交叉口与“橡皮筋”相交点,再在各路段中点附近合适位置插入共计m-1根“刚性杆”(绿波带共m个交叉口、m-1条双向路段),并与相交的“橡皮筋”连结。通过水平移动调整交叉口上下游路段中点附近位置“橡皮筋”与“刚性杆”连结点的位置,使交叉口与上下游“橡皮筋”与“刚性杆”连结点处于一条直线上,“恒速通过交叉口模型”求解过程即告完成(该通过交叉口的直线斜率即为车流通过交叉口的恒定速度)。“恒速通过”虽然损失一些行程速度,却换来交叉口交通的安全性提高。在各路段中间产生的交通波对各交叉口影响也达到最小图(2(a)、(b))。
为进一步减缓路段交通波的影响,可在设计绿波时空关系不变的情况下,利用样条函数或人工作图对其对应S-t图上的折线进行光滑处理使折线交接角度圆顺光滑,反映在引导灯组前进速度的突变为缓慢变化。
3 算例
南京市水西门大街为城西跨江主干道,交叉口间间距不一。主线上纵向交通量大且在高峰小时内交通方向系数约为0.5,横向交通对于主线交通的影响不大。对其相邻的5个交叉口进行现场高峰小时交通调查,各交叉口基本情况见表1。
4 初步仿真分析
根据调查资料,本文设计了以下方案:
(1)方案1:依据表1中的调查资料,对道路交通及控制进行直接仿真模拟;
(2)方案2:传统双向绿波带方案。依据调查资料中各交叉口的配时情况,选取关键交叉口及适宜的行驶速度,调整相位差(详见表2);
(3)方案3:变速双向绿波带方案。依据调查数据对各交叉口分别进行信号配时,选取最长周期作为公共周期,其余交叉口所增加的时间按各进口流量比分配至相应相位的绿灯时间上,运用“橡皮筋模型”求解(详见表3);
(4)方案4:变速双向绿波带优化方案。沿用方案3中的信号配时系统,运用“恒速通过交叉口模型”求解(见表4)。
运用VISSIM建立五交叉口的水西门大街的模型,交通加载依据表1中的流量调查数据,仿真场景实际时间1 h以上,各方案流量加载相同。由于软件限制,路中排灯的速度引领功能由各路段限速功能替代。除方案1和方案2模型水西门大街按城市主干道50 km·h-1限速外,方案3和4则依据变速绿波设计对划分路段进行预定车速限制。各方案仿真的车辆平均行驶速度及平均延误见图3与图4,主干道通行能力如图5所示。
图3表明主干道上变速双向绿波带的平均车辆行驶速度明显高于传统双向绿波和现状的交通控制方案。恒速通过交叉口的方案在实际应用中比经典橡皮筋模型方案更能提高车辆的平均行驶速度。图4反映出变速双向绿波下干道上车辆的平均延误明显小于传统绿波和现状控制方案,恒速通过交叉口方案也比经典橡皮筋模型方案更优。由于变速双向绿波带带宽显著大于传统双向绿波,更多的时间分配给横向交通,这也使得方案2下R2交叉口交通的平均延误相时较小。但是16.8 s的带宽明显过窄,基本无法实际应用,反映出传统双向绿波带宽设计受交叉口间距的制约很大。图5表达了干线和交叉口横向的通过能力。在R1和R2交叉口的通过能力几乎不变的情况下,恒速通过交叉口方案干线上单位时间内通过的车辆数最多,橡皮筋模型、传统绿波和现状方案通过能力依次降低。表明在一定拥堵程度下,恒速通过交叉口方案最大程度地降低了交通波的影响,与经典橡皮筋方案相比,具有更大的通过能力。
5 结语
双向绿波使得干道上车流像潮汐一样,随移動绿灯组一次通过若干个控制交叉口,大大地减少车流在路口停顿带来的启动损失与收尾损失,增加干道的通过能力。同时由于减少车辆怠速,也有利于车辆的节能减排。变速绿波带可应用于有多交叉口的城市中心区拥堵干道,其双向绿波带宽设计具有较大的灵活性。路中排灯引领行车变速设计实现简单、成本低,具有良好的性价比。恒速通过交叉口的双向绿波模型通过能力大、交通波影响小、行车安全性高,具有较高的研究价值。
虽然仿真结果已经表现出变速绿波的优势,但本文在变速双向绿波带仿真中未考虑交叉口横向转进转出干道的交通量的影响,还未能充分挖掘出变速绿波的潜力。横向进出主线的交通对变速双向绿波设计的影响需要进一步细致研究。
参考文献:
[1]王炜,过秀成.交通工程学[M].南京:东南大学出版社,2011.
[2]仇东华.干线协调控制的研究与设计[D].合肥:中国科学技术大学,2009.
[3]朱和.城市交通干线双向绿波带控制技术研究[J].交通信息与安全,2013,31(2):144-148.
[4]朱和,常玉林.基于灵活相位的双向绿波协调控制[J].公路交通科技,2013,30(7):140-143,158.
[5]常玉林,张其强,张鹏.城市干线双向绿波控制优化设计[J].重庆理工大学学报(自然科学版),2014,28(12):108-112,118.
[6]陈昕.基于绿波带中心线交点的双向绿波控制图解法[J].辽宁工业大学学报(自然科学版),2017,37(2):137-140.
[7]卢凯.非对称通行条件下的双向绿波协调控制数解算法[J].中国公路学报,2015,28(6):95-103.
[8]卢顺达,程琳.非对称相位相序方式下的双向绿波协调控制图解法的优化[J].公路交通科技,2015,32(1):128-132.
[9]唐克双,孔涛,王奋,等.一种改进的多带宽干线协调控制模型[J].同济大学学报(自然科学版),2013,41(7):1002-1008.
[10]孙剑,刘好德,李克平.城市干道交通信号协调控制仿真优化[J].同济大学学报(自然科学版),2009,37(11):1467.
[11]舒毅,吴中.基于路边灯光诱导的双向绿波带设计[J].交通标准化,2007(5):189-191.
[12]荆彬彬.基于双向最大绿波带宽的通用干道协调控制数解算法[J].交通运输系统工程与信息,2017,17(2):76-82.
(责任编辑:曾 晶)
