高速铁路接触网定位器水平力的精确计算
2018-07-09李西锋吴铁成
李西锋,吴铁成
高速铁路接触网定位器水平力的精确计算
李西锋,吴铁成
对接触网定位器水平力进行分析,提出不同线路条件下定位器水平力的计算方法,并通过实例进行多个连续点的水平力计算,得出水平力大小的规律,为接触网腕臂计算提供依据。
接触网;定位器;计算;水平力
0 引言
在高速铁路接触网施工中,为了提高腕臂计算的准确性,减少接触线定位点处出现硬点,改善受电弓受流条件,腕臂计算须在受力状态下进行。在腕臂计算过程中,定位器坡度的计算是关键和重点,而水平力的计算是定位器坡度计算中的关键环节,但由于线路水平曲线的存在,使得曲线段定位器水平力的计算存在偏差。施工验收标准规定定位器应处于受拉状态,根据西门子公司的计算资料,定位器所受拉力不应小于80 N,在其腕臂计算程序中详细标注了每个定位器的水平力。本文将对定位器水平力进行分析,推导出其在各种线路条件下的计算方法,可用于指导腕臂的精确计算。
1 单个定位器水平力计算
以两跨即3个支柱为例,若线索张力、3个拉出值及线路条件确定,便能计算出中间支柱接触线定位点的水平力。根据不同的线路条件分别对水平力的计算方法进行分析。
1.1 直线区段
图1为直线区段单定位点示意图。图中1、2为跨距,、、为接触线拉出值。
根据图1及三角形计算可得2#支柱接触线定位点水平受力的计算式为
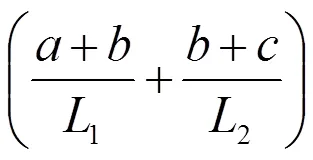
式中,c为接触线张力。

图1 直线区段单定位点示意图
1.2 圆曲线区段
图2为圆曲线区段单定位点示意图,图中为曲线半径。
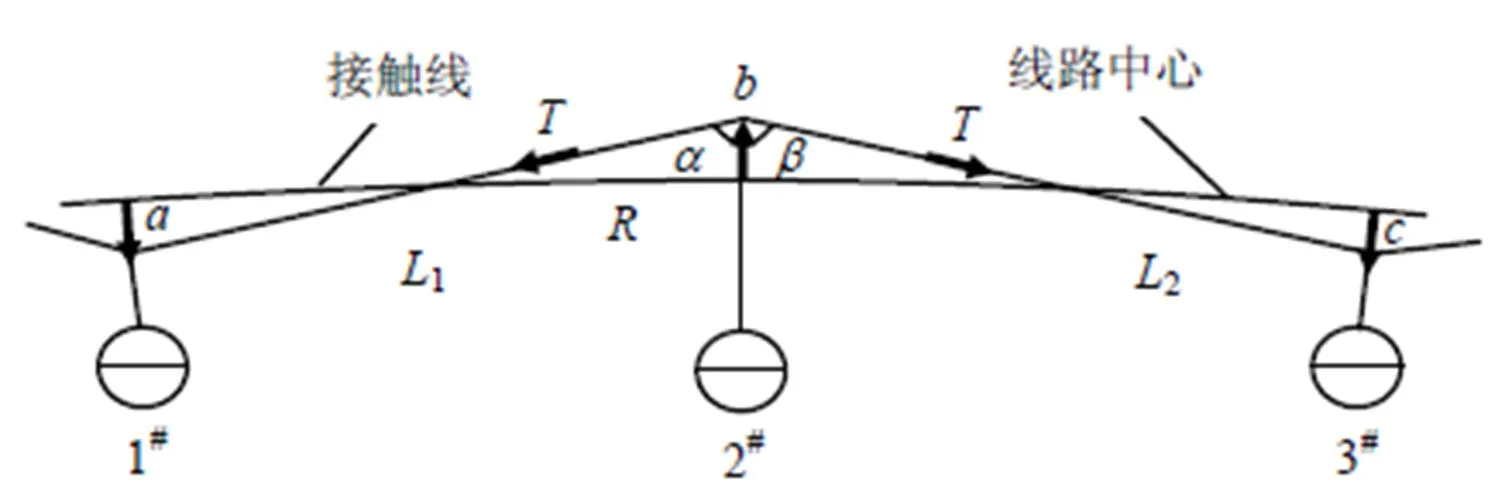
图2 圆曲线区段单定位点示意图
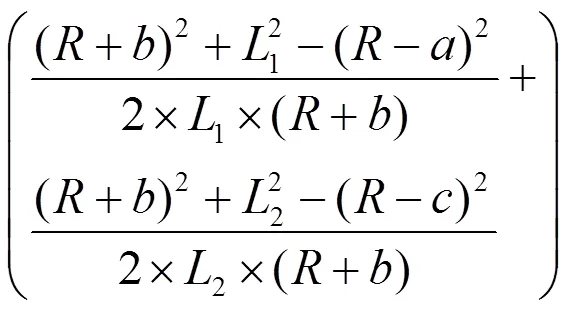
由图2及三角形计算可得2#支柱接触线定位点水平受力的计算式为
=c×(cos+ cos) =c×
1.3 缓和线区段
缓和曲线区段单定位点受力如图3所示。

图3 缓和曲线区段单定位点示意图
a,b,c为线路中心到圆心的距离,o为圆心到直缓点的距离,o为缓和曲线长度。2#支柱接触线定位点水平力的计算式为
式(3)中只有a,b,c为未知数。图3中,由o、、a组成的三角形可求得a,即

式(4)中,o,均为未知数,需单独计算。
式中,为2#支柱到直缓点的里程差。
由o、(圆曲线切线长度)、(圆曲线半径)组成三角形如图4所示,可得

式中,为曲线外矢距,为线路转向角。
角度的计算式为
=-=
将式(5)—(7)代入式(4)计算出a。同理可计算出b,c,然后将a,b,c代入式(3),可算出2#支柱接触线定位点在缓和曲线段的水平力。
2 连续定位点水平力分析
为了更好地研究水平力在直线及曲线区段上的变换规律,需计算连续定位点的水平力。以某条高铁为例,计算18个连续定位点的水平力。接触网与线路参数如表1所示。

表1 算例参数表
2.1 支柱位于曲线外侧
当支柱位于曲线外侧时,分析定位点的受力情况,其水平力计算结果如表2所示。

表2 支柱位于曲外水平力计算结果
注:表中拉出值、水平力数值为负时表示拉向支柱反侧,为正时表示拉向支柱侧。
2.2 支柱位于曲线内侧
当支柱位于曲线内侧时,分析定位点的受力情况,其水平力计算结果如表3所示。
表3 支柱位于曲内水平力计算结果
注:表中拉出值、水平力数值为负时表示拉向支柱反侧,为正时表示拉向支柱侧。
2.3 水平力大小规律
通过对连续定位点水平力计算结果进行分析,当支柱位于直线区段,接触导线的张力、拉出值、跨距不变时,导线的水平力大小相等;支柱位于圆曲线外侧时,正反定位的水平力分别保持恒定,且正定位的水平力大于反定位水平力;支柱位于圆曲线内侧时,正反定位的水平力分别保持恒定,且正定位的水平力小于反定位水平力;支柱位于缓和曲线外侧时,正定位的水平力逐渐变大;支柱位于缓和曲线内侧时,正定位的水平力逐渐变小。
3 结语
根据不同线路条件,推导出单个定位器水平力的计算方法,并采用该方法计算连续定位点的水平力,由计算结果分析得出不同线路条件下定位点水平力的变化规律,为接触网腕臂的精确计算提供参考和依据。
[1] 于万聚. 高速电气化铁路接触网[M]. 成都:西南交通大学出版社,2003.
[2] 张延寿,胡杰. 铁路测量[M]. 成都:西南交通大学出版社,1995.
[3] 常丽,李丰良,年晓红. 武广高铁定位器坡度算法研究[J] .铁道科学与工程学报,2014(2):131-135.
[4] 和敬涵,孟 鑫,罗国敏,等. 高速铁路接触线实时张力计算方法研究[J]. 电气化铁道,2014(z):152-155.
On the basis of analyzing the horizontal force of OCS steady arms, the calculation methods of horizontal force of steady arms under different line conditions, the regularities of sizes of horizontal force are obtained through several cases of horizontal force calculation at several consecutive points, and they are able to provide references for calculation of OCS cantilevers.
OCS; steady arm; calculation; horizontal force
10.19587/j.cnki.1007-936x.2018.03.012
U225.4
B
1007-936X(2018)03-0039-03
2017-08-01
李西锋.中铁电气化局集团西安电气化工程有限公司,助理工程师;吴铁成.中铁电气化局集团西安电气化工程有限公司,高级工程师。