六轴机器人在大型玻璃基板自动上料中的应用
2018-07-06刘向勇
秦 辉, 武 杰, 刘向勇
(中电科风华信息装备股份有限公司, 山西 太原 030024)
引言
工业机器人指的是能在人的控制下智能工作,并能完美替代人力在生产线上工作的多关节机械手或多自由度的机器装置。与人力相比,工业机器人具有低成本、高效率的特点。近年来,随着国内劳动力成本不断上涨,我国制造业劳动力优势不显,制造业亟待向智能化转型,在此机遇下,工业机器人大有可为。
1 工业机器人的应用优势
1)高安全系数。使用小型搬运机器人能够替代人工,进行比较高难度的作业。采用机械手生产,可以更大程度地保障工人的工作安全性。在需要倒班的生产车间中,工人晚上更容易出现生理性疲劳,导致安全事故的发生,而使用机械手则可确保安全生产。另外,有些较为危险的工种,采用工业机器人操作,精确度、稳定性和安全性更强,可以保障人员安全。
2)提高效率和品质。工业机器人能够不间断地进行24 h作业,且机器人不受情绪影响,而工人则相反。机械手生产一件产品耗时是固定的。在同样的生产周期内,使用机械手的产量也是固定的,不会忽高忽低。并且工业机器人生产每一模的产品生产时间固定化,产品成品率也高,使用机器人生产更符合企业利益。
3)节省原料,降低成本。机器人可以24 h进行操作,工人会存在偷懒行为,取出产品时间不定,而机器人则不会,且如今人工成本越来越高,而机器人属于固定资产。另外,采用工业机械手操作的模式,自动流水线更能节省厂地,使整厂规划更小、更紧凑[1]。
4)便于管理。以往企业中很难精确保证每天的生产量,监管人员每天琐事较多,很难时时刻刻去抓员工工作效率。使用机械手生产后,用工人员减少,员工管理更方便了。
5)提高企业形象。使用机器人作业,能够提升客户对企业的形象认识,能间接增加企业订单数量。
2 玻璃基板自动上料整体设计方案
上料机由料盒夹具、上料转台部件、拾取玻璃机器人组件、撕膜机器人部件、操作台、气路组件、控制组件等组成。外围加装安全保护围栏如图1所示。
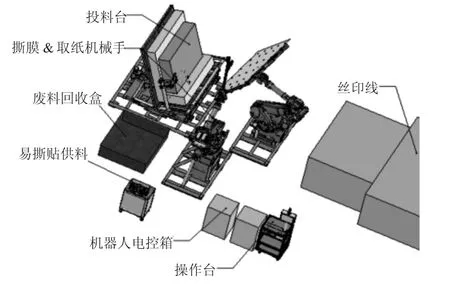
图1 系统整体方案
2.1 料盒夹具
料盒夹具用于料箱上料、下料周转时固定箱体和玻璃。夹具主体由方钢管焊接而成,表面喷塑处理。料盒夹具由固定底架、侧活动架和压紧机构组成,压紧结构为可拆卸式,便于铲车上下料。
2.2 料盒转台
料盒转台由转台固定底座、转台机体、支撑气缸、支撑轮、倾斜支架、限位机构、压纸机构、离子风棒等组成。压纸机构由高度方向模组、厚度方向模组、压纸气缸和压纸件等组成。当上料机械手取玻璃时,压纸气缸伸出,压纸件压住垫纸,防止被玻璃带起。离子棒用于消除静电,辅助玻璃和纸分离。本机构用于支撑玻璃料盒,完成料盒垂直位于倾斜上料位之间的转换,并在玻璃上料时压住垫纸[2]。
在垂直上料位时,由铲车将带夹具的料盒送到料盒支架上,人工旋转90°到玻璃上料位,由支撑气缸伸出将料盒支架推至倾斜位置,即玻璃上料位。
料箱内玻璃上完时,或半箱玻璃需要切换品种时,人工将转台旋转90°返回原位,支撑气缸缩回将料盒支架拉回垂直位置,由铲车将料箱卸下。
2.3 取料机器人
机器人取料组件由机器人、真空吸附架、吸盘等组成。取料机器人6个自由度组合动作可将玻璃从上料转台上的料箱里吸附转运到丝印传送台上的指定位置。
2.4 撕膜、取纸机器人
撕膜、取纸机器人均由支架、机器人、撕膜头组件、吸盘组、气缸组等组成。撕膜机械手将保护膜吸起或粘起并用气缸夹持,再通过机器人6个自由度组合运动将保护膜分离并放到废料区域。
2.5 易撕贴供料机
易撕贴供料主要由交流电机带动传动轴转动,当光电传感器检测到易撕贴到位时,交流电机停止转动。
3 控制系统设计
3.1 电气设计
系统采用安川六轴机器人作位动作执行机构,同时采用三菱可编程逻辑控制器作为时序控制部件,配合Proface触摸屏实现人机交互,安川六轴机器人作为工业机器人中的一线品牌,可以满足绝大部分应用场景。选用PLC控制的优点在于系统稳定、拓展性强、维护方便,如图2所示。

图2 设备硬件系统配置图
3.2 软件设计
系统运行流程如图3所示。
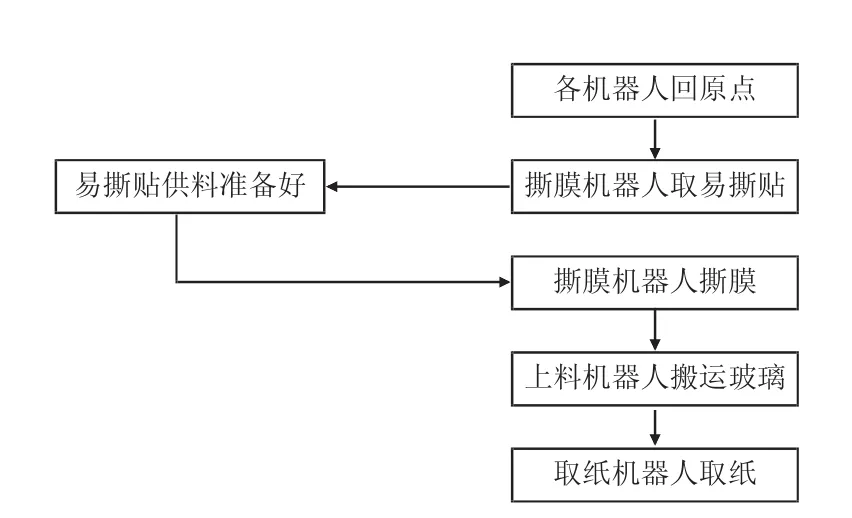
图3 设备运行流程图
系统初始化,各机器人手臂回原点。首先撕膜机器人运动到等待位置,易撕贴供料电机运转到合适位置,撕膜机器人夹爪气缸动作,夹取易撕贴回到等待位置,此时检测料盒区域有无其他机器人。当检测到料盒区域无其他机械手,开始执行撕膜流程,机器人快速运动到预先设定位置,开始慢速执行平移动作,当机器人前端接近传感器有信号时,机器人停止前进,易撕贴气缸执行向前伸缩动作,此时易撕贴具有黏性的一面粘住玻璃基板表面的塑料膜,等待1 s后开始执行撕膜动作,机器人按照预定的轨迹运动到废料盒上方,执行吹气动作,把废膜放到废料盒中,回原点后,标志位复位,上料机器人执行上料动作,具体接近动作同撕膜,上料完成后取纸机器人执行取纸动作[3]。操作界面如图4所示。
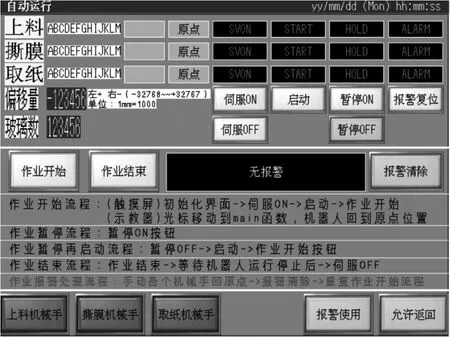
图4 操作界面
3.3 技术难点
3.3.1 玻璃表面膜难撕
依靠静电贴附在玻璃表面的塑料膜很薄,如果采用传统的气缸夹爪,机器人坚硬的机械臂很容易把玻璃给撞坏掉,同时塑料膜在撕的过程中容易拉扯坏。
解决方法。机械手前端夹取易撕贴,依靠易撕贴的黏性把膜给粘起来,同时优化机械手运动轨迹,使膜避免被料盒给拉扯断。
3.3.2 玻璃难取
大型玻璃之间,除了存在静电,还有因为玻璃自重压合产生的真空,在机械手吸取玻璃的过程中很容易把后面的玻璃给带起来,造出后面玻璃掉落的风险。
解决方法。在料盒上加装离子风棒用来除静电;使用缓冲较长的吸笔;优化机械手接触玻璃的角度,利用吸笔缓冲使机械手再吸取玻璃的时候产生角度,从而破坏玻璃之间的真空。
3.3.3 玻璃之前纸难取
玻璃之间用纸来隔离,这种纸密度低、强度小,采用传统吸笔加气缸夹爪,很容易造成纸张的掉落。解决方法。采用大型抽风机,产生类似于吸尘器的效果,很好地解决了上述难点。
3.3.4 机械臂活动受限
设备现场空间局促,机械手不能很好地施展手臂,同时容易造成机械臂的碰撞。
解决方法。设置多个干涉区域,同时,优化机械手运动轨迹和整个上料流程,使得在容易产生碰撞的区域,在同一时间只有一个机械臂在运动。
4 结论
六轴机器人的上料系统在进行大型玻璃的搬运过程起到了良好的效果,有效取代了人工上料,大大提高了生产效率,满足了客户的要求。
[1]孙立蓉,李亚丽.AMLCD基板玻璃切割条件的选择[J].陕西科技大学学报,2005,23(4):103-107.
[2]李亚利,张方辉.TFT—LCD切割裂片工艺参数探讨[J].液晶与显示,2006(1):96-97.
[3]吕沫,张飞特.TP玻璃切割工艺研究[J].电子工艺技术,2014,35(4):242-245.
