基于分布式LTE网络的室内定位系统
2018-07-03杨宇陈明刘大庆
杨宇,陈明,刘大庆
基于分布式LTE网络的室内定位系统
杨宇1,陈明1,刘大庆2
(1. 中国移动通信集团安徽有限公司,安徽 合肥 230088;2. 华为技术有限公司,浙江 杭州 310052)
室内定位技术在商业和安全领域都有重要的应用,但目前仍存在定位精度低、部署成本高等问题,对此提出了一种基于LTE网络的室内定位系统,该系统定义在华为分布式皮基站之上,通过测量移动终端设备到多个接入点的参考信号强度(RSRP)或时延(ToA)进行定位。为克服LTE中上行功率控制对终端发射信号的影响,采用多信标联合解码,将绝对的信号强度或时延转换成信号强度差或时延差进行定位;该系统依托广泛部署的LTE网络,对处于无线网络连接态的终端设备提供无缝的定位服务,不依赖第三方软件,并且不会对网络性能造成影响。实验结果显示,在商场等室内场景下,使用时延差分(TDoA)技术的华为室内定位系统的平均定位精度达到3~5 m,显示出良好的应用潜力。
室内定位;分布式LTE网络;分布式皮基站;场强定位;时延定位
1 引言
随着移动互联网的发展和移动用户数的增加,室内定位技术成为近几年研究的热点,与室外环境不同,信号在室内环境传播过程中会经历各种散射、反射以及衰减,这都给精确的室内定位带来困难。近几年来涌现出许多室内定位技术,根据定位使用信号的不同,可以分为基于射频信号的定位、红外线定位、超声波定位、图像定位等,其中使用射频信号的定位技术通用性强且部署成本较低,因而受到广泛的关注。射频信号定位又包括基于移动蜂窝网络的基站定位[1-2]、Wi-Fi定位[3-4]、蓝牙定位[5]、超宽带定位等。基站定位和Wi-Fi定位主要有两种实现方式:一种是通过记录终端设备和3个以上的网络接入点(AP)的无线信号强度或者时延[6-9],通过差分算法进行三角定位;另一种是事先记录已知位置点的信号特征(强度、时延等),建立位置点和信号特征的关系,通过对比信号特征获取未知点的位置信息,即指纹定位[10-11]、基站定位和Wi-Fi定位一般可以达到米级的定位精度,但是在非直射环境(non line of sight,NLOS)情况下定位精度并不能得到保证。蓝牙定位技术与Wi-Fi定位类似,通过基于蓝牙网络的三角定位或者指纹定位实现,需要终端装备蓝牙模块,还需部署蓝牙基站,最高可以达到亚米级定位精度。超宽带室内定位技术与传统通信系统定位技术差异较大,定位采用超宽带脉冲信号,由多个传感器采集信号到达时延和方位角等信息,并对位置进行分析,超宽带定位技术多径分辨能力强、精度高,定位精度可达亚米级。上述定位方法各有利弊,分别适用于不同场合和应用,其中基站定位可以复用现有的网络基础设施,提供覆盖室内和室外的无缝定位服务,因而有更广泛的应用。
目前LTE网络已在全球范围内广泛部署,经研究发现70%以上的移动流量来自室内,如商场、机场、办公区域等,这也使分布式LTE网络在室内场景的覆盖率逐步提高,另一方面,精确的室内定位也有着越来越多的需求,比如企业用户希望为员工提供无所不在的移动办公环境,室内大众消费场所希望为用户提供室内导航、业务推送等差异化服务,但是目前室内定位功能在LTE网络中的部署率并不高。本文介绍一种基于LTE网络的室内定位系统,该定位功能定义在华为分布式皮基站之上,是室内定位功能在LTE网络中的首次商业级实现。该定位系统在分布式LTE网络架构之上增加一个定位锚点服务器(service anchor,SVA),实现信息收集、算法实现、结果上报等功能。LTE+SVA的定位系统架构也提供了一个通用的硬件平台,通过算法开发可以实现多种定位技术,比如场强三角定位、时延定位、指纹定位等。该定位系统利用已有的分布式LTE网络,为处于无线资源控制(radio resource control,RRC)连接态的终端用户提供广泛无缝的定位服务,不影响网络性能。为测试该定位系统的性能,在商场、办公室等室内场景进行了广泛的现场测试,测试结果显示,基于TDoA的定位系统在商场场景下平均定位精度达到3~5 m。
2 LTE+SVA室内定位系统架构
首先对LTE+SVA的室内定位系统架构进行简单介绍,华为数字化分布式LTE网络是为室内场景开发的新型室分覆盖系统,由微型射频拉远单元(pico remote radio unit,pRRU)、CPRI汇聚单元(remote hub,rHUB)以及基带单元(base band unit,BBU)组成,系统架构如图1所示。其中微型射频拉远单元实现射频信号处理功能,以上行为例,微型射频单元在远端将接收到的终端射频信号转换成数字信号,然后通过网线将数字信号传输到汇聚单元进行汇聚,数字信号汇聚之后传输到基带单元进行处理,相比于传统室分系统,避免了射频信号在线缆中的长距离传播,减少了信号在线缆中的损耗,更有利于提升上下行的信噪比;并且数字化的微型射频单元使基站能够区分每个射频单元接收到的终端信号,也为射频单元粒度的室内定位提供硬件基础。汇聚单元实现多路射频单元信号的汇聚,为了节省基带资源,汇聚单元会将射频单元传输过来的数字射频信号进行数字合路,一个汇聚单元设备最多可连接8台射频单元,除此之外,汇聚单元还为射频单元提供基于网线的远程供电(power on Ethernet,POE),网线供电使射频单元的部署更为灵活。基带单元则实现基带信号的处理以及信令流程的控制和发送,在定位系统中,基带单元还负责定位数据的收集和上报。
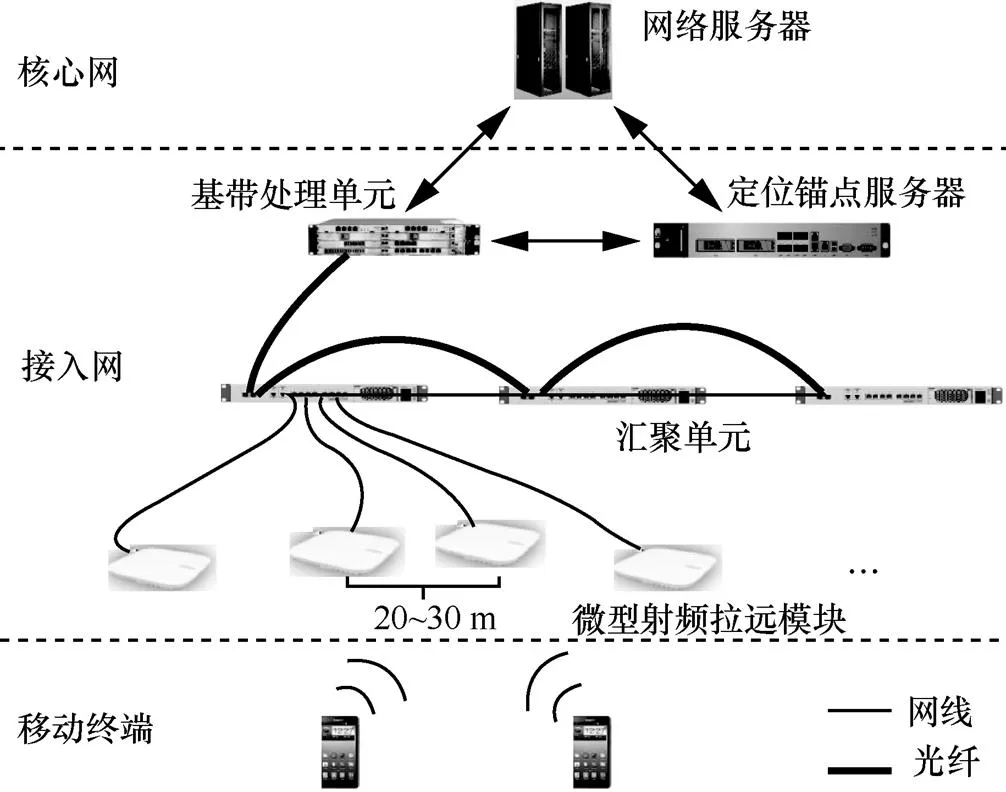
图1 基于分布式LTE网络的室内定位系统架构
定位锚点服务器(SVA)是实现定位功能的硬件设备主体,SVA从基带单元收集定位所需的数据,然后按照一定的算法对数据进行处理得到位置信息并上报网络服务器,处于网络上的服务器对接SVA,接收用户位置信息并提供基于位置的服务(location based service,LBS),SVA部署简单,不需要改变原有LTE室分网络架构,不增加终端设备的运算负担,对网络性能的影响小。
3 定位技术原理
LTE+SVA是一个通用的室内定位平台,通过软件开发可以实现多种定位技术,比如基于RSRP的定位、ToA定位、指纹定位等,本文主要讨论RSRP和ToA定位,其他技术也可以在LTE+SVA平台上实现,作为未来研究的课题。
3.1 基于RSRP的场强三角定位
场强三角定位技术通过获取室内多个pRRU独立测量的移动基站(mobile station,MS)或者用户设备(user equipment,UE)上行信号强度,结合pRRU的室内坐标和高度,计算出用户终端在室内的位置。根据经验传播模型,传播距离与路径损耗(path loss,PL)的关系可表示为:

由于LTE网络中上行功率控制的存在,移动终端在不同干扰场景、不同位置,上行发射功率会不尽相同,因此无法通过接收信号的绝对强度来判断终端设备与pRRU的距离。由于MS发射的信号同时被多个pRRU接收并测量,pRRU收到上行信号强度和MS到pRRU的距离有关,两个pRRU收到的信号差可以转换成MS到两个pRRU距离比例:
路径损耗还可以由发射功率—接收功率得到,即:
PL1=Tx-RSRPAP1(4)
PL2=Tx-RSRPAP2(5)
所以PL2−PL1可以表示为:

即:
dm1= RSRPAP2-RSRPAP1(8)
通过一个无线接入点对(两个pRRU)的信号差值,计算出描述移动终端可能的位置轨迹函数,多个无线接入点对可以推导出多个移动终端轨迹函数,其中的交点就是移动终端的位置。
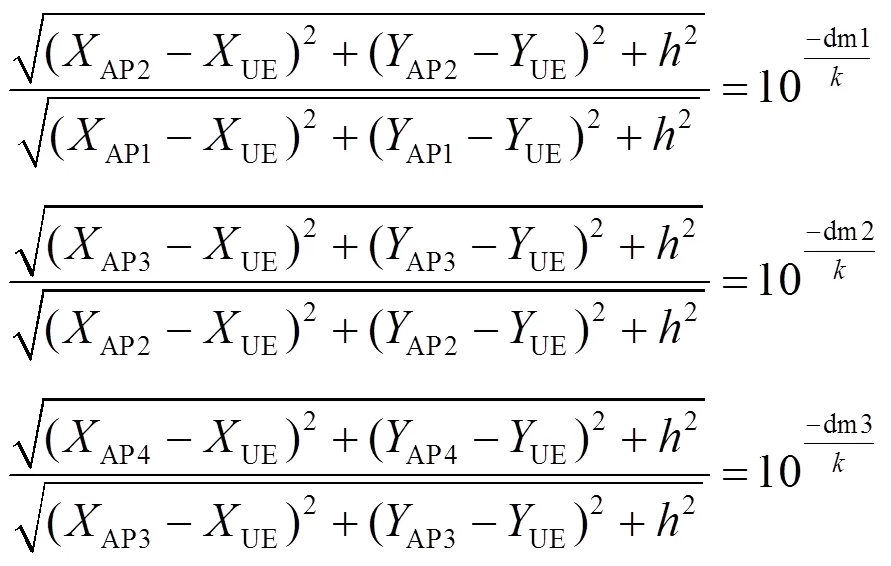
从计算过程可以看出,场强三角定位算法一般需要4个不同pRRU接收到的电平强度。
3.2 TDoA定位
通过获取室内多个无线接入点独立测量的移动终端上行信号的到达时间,结合无线接入点的室内坐标和高度,可以计算移动终端在室内的位置。移动用户的到达时延是用户上行测量参考信号(reference signal,RS)的到达时延,由于图1所示室分系统采用数字射频合路技术,即将多个pRRU的数字射频信号在rHUB上合路再传输到基带单元BBU进行处理,以节省基带资源。因此基站无法识别每个pRRU的测量结果,需要在pRRU端对RS信号做处理,使BBU能够单独测量来自每个pRRU的信号。通过RS轮询测量的方法可以获取pRRU粒度的时延结果,但是每个轮询时刻只能获取一个pRRU的测量结果,效率较低、时效性较差。这里采用RS ToA轮询+RS时延合路的检测方案。延时合路的原理就是在轮询时刻,保留两个pRRU的测量值,其中一个pRRU的测量信号增加一个人工时延,这样基站就可以对2个pRRU的测量结果在时间上进行区分。TDoA定位的原理如下。
根据“时间()×速度()=距离()”的定理可以得到MS到两个AP的距离:
AP1×=1(11)
AP2×=2(12)
式(11)、式(12)相减即:
(AP1-AP2)×1-2(13)
将式(13)两边的变量用TDoA能够获得的量来表示:
AP1-AP2=ToA1-ToA2(14)


得到:
建立如下多个方程计算UE位置(UE,UE),即用户终端在室内的位置:
从式(18)可以看出,为确定一个移动终端的位置,一般需要4个不同pRRU测得的时延信息。
由于BBU测量得到的时延包含了RS空口传输的时间和信号处理的时间,所以基站测量得到的ToA在各个pRRU的时间起点是不同的,如果直接进行ToA相减,得到的TDoA不能代表MS和pRRU之间的距离差,需要先扣除pRRU信号处理的时间,上述处理已在系统中完成,计算式中不再体现。
4 仿真分析
在外场测试之前,对RSRP和TDoA定位技术进行仿真验证。仿真条件设置如图2所示,设置一个边长为20 m的正方形区域,4台pRRU分别放置在正方形区域的4个角上,挂高为4 m。在正方形区域内,均匀设置400个测试点,每个点之间的距离为1 m。在每一个测试点上,单个时刻下pRRU的RSRP和ToA接收值是均值为理论值、标准差为3 dB的正态分布产生的随机数。
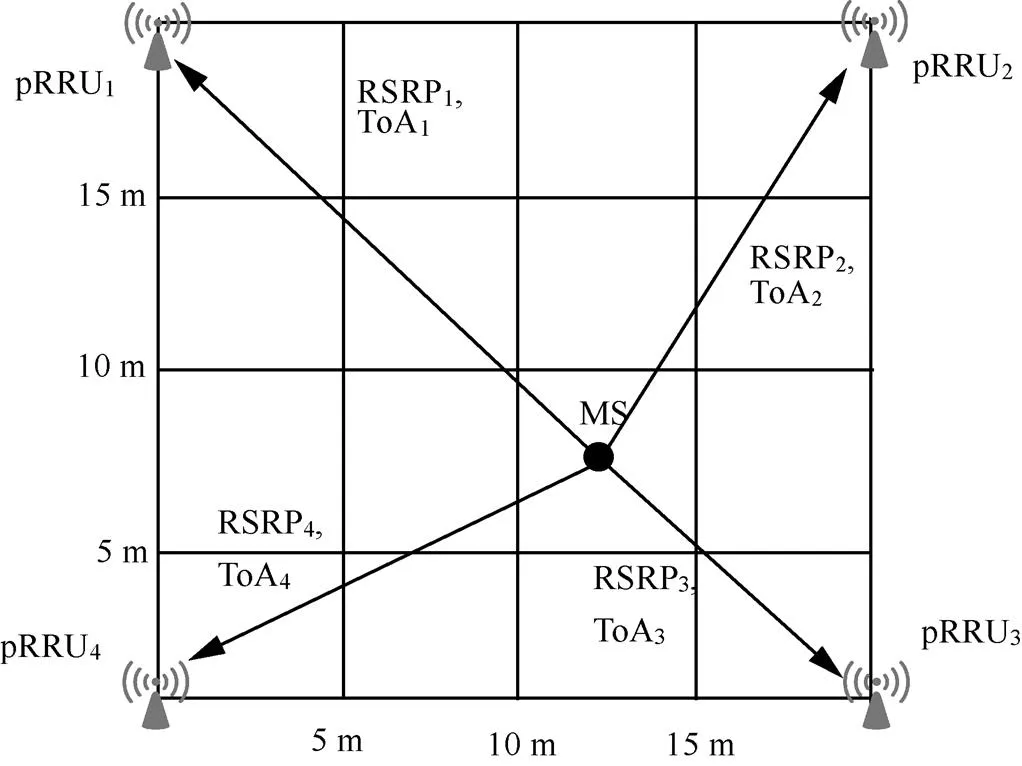
图2 定位仿真示意
仿真定位精度如图3所示,可以看出,两种方法的平均定位精度比较接近,RSRP的平均误差为4 m,TDoA的平均误差为3.8 m。一般采用67%的累计概率来表征某一场景下的定位精度,按照这一标准,RSRP方法的定位精度为4.3 m,TDoA的定位精度为3.5 m。整体来说,基于TDoA的定位精度略高于基于场强的定位精度,定位结果也更加稳定。在实际场景中,定位精度受到多方面因素的影响,比如传播环境、干扰噪声、人体的阴影效应以及天线方向图的不规则程度等,为了评估该定位系统在实际环境中的表现,进行了广泛的现场测试。
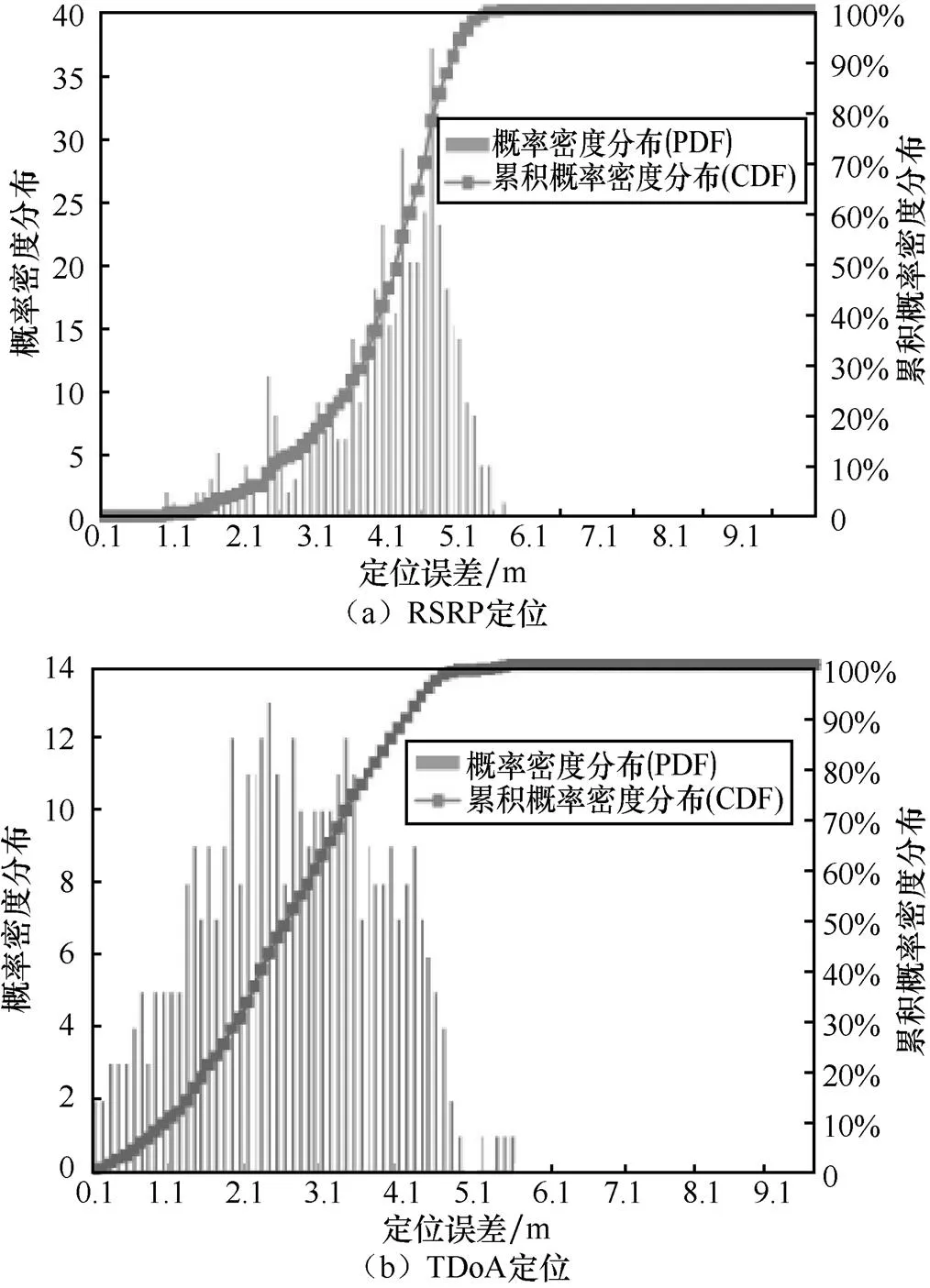
图3 仿真定位精度
5 现场测试
现场测试在一个大型室内商场进行,商场的平面图如图4所示,商场内聚集了30多家商铺,中间还设置有扶梯镂空区,电磁环境比较复杂,为测试室内定位系统精度,在该区域内共挂载了62台pRRU设备,pRRU设备的点位也标注在平面图上。pRRU的平均距离可由式(19)计算:
其中,和分别代表区域的长度和宽度,为布置的pRRU设备数,由此可计算得到pRRU的平均距离为20 m。定位系统的定位精度与pRRU的平均部署距离有直接关系,一般情况下,定位精度为1/4~1/3的pRRU平均距离,但是一般把平均距离设置为20 m左右,更低的pRRU距离并不能无限提高系统的定位精度,也会提高系统部署成本。在商场内随机选取20个测试点,测试点平均分布在走廊、商铺、楼梯等位置,在每个测试点上进行10次测试,以更好地测试定位的平均精度。
测试结果如图5所示,其中图5(a)给出了RSRP方法的测试结果统计数据,图5(b)给出了TDoA方法的测试结果统计数据。按照67%的累计概率,RSRP的定位精度为5~10 m,而TDoA方法的定位精度为3~5 m,好于基于场强的定位方法。RSRP定位使用的是一个OFDM符号内所有资源块(resource element,RE)的接收信号功率平均值,不会对多径的信号强度进行区分,而TDoA定位能够测量主径信号的到达时延,对散射环境有较强的抗干扰能力,尤其是在直射径比较明显的场景下,因而取得较高的定位精度。RSRP方法得到的结果中,23%的测试点定位误差小于3 m,而TDoA方法,45%的测试点定位精度小于3 m,这些测试点大部分集中在走廊等空旷区域内。多径散射环境对室内定位精度产生严重的影响,继续提升系统在室内的定位精度也是未来研究的重点。
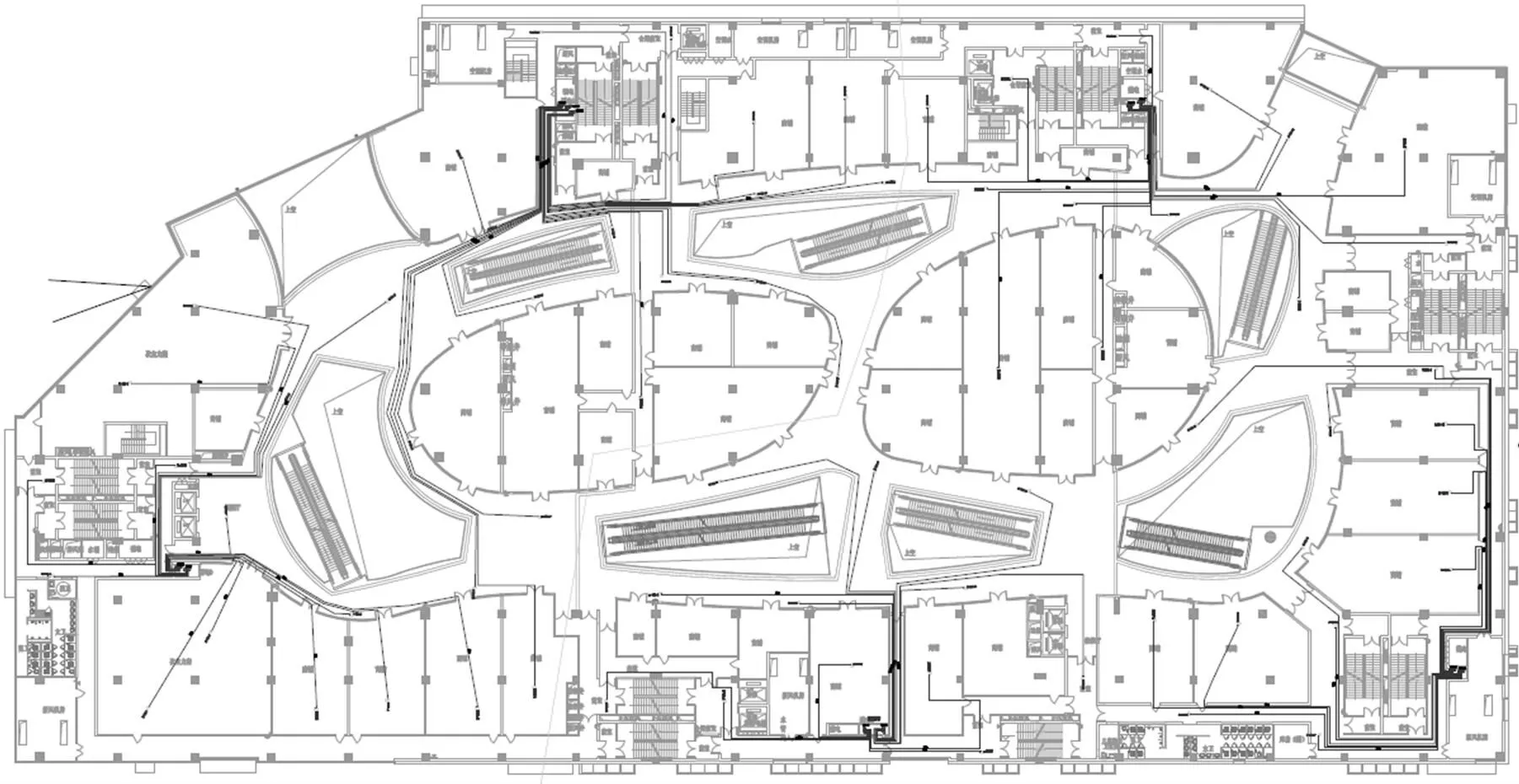
图4 测试场地平面图
由于定位功能需要采集参考信号,而FDD小区RS信号是默认关闭的,所以定位功能对网络性能有一定的影响,但这种影响非常小,经过测试,小区上行吞吐率的负面影响小于5%。

图5 测试定位精度
6 结束语
本文介绍了一种基于分布式LTE网络的室内定位系统,该系统依托于广泛分布LTE室分系统,在原有通信系统之上增加一个定位锚点服务器,不改变原有通信系统架构,部署成本低,对处于网络连接态的终端用户提供无缝定位功能,不依赖第三方软件,且定位功能对网络性能的影响小。通过现场测试,基于TDoA的定位系统在商场场景下,实现3~5 m的定位精度,满足一般的室内定位需求,同时发现在多重墙壁阻隔的情况下,定位误差较大且不够稳定,这也是未来优化的重点。
[1] SAYED A H, TARIGHAT A, KHAJEHNOURI N. Network-based wireless location [J]. IEEE Signal Processing Magazine, 2005, 22(4): 24-40.
[2] 吕亚娟, 刘珊, 胡荣贻, 等. 一种基于多天线簇的新型LTE室内定位系统[J]. 电信科学, 2017, 33(3): 67-75.
LV Y J, LIU S, HU R Y, et al. A novel LTE indoor location system based on multiple antenna clusters [J]. Telecommunications Science, 2017, 33(3): 67-75.
[3] HONKAVIRTA V, PERALA T, ALI-LOYTTY S, et al. A comparative survey of WLAN location fingerprinting methods[C]//The 6th Workshop on Positioning, Navigation and Communication, March 19, 2009, Hannover, Germany. Piscataway: IEEE Press, 2009: 243-251.
[4] 刘畅, 张迅. WLAN接入点的室内定位技术[J]. 电信科学, 2015, 31(2): 135-139.
LIU C, ZHANG X. WLAN access point indoor positioning technology[J]. Telecommunications Science, 2015, 31(2): 135-139.
[5] FELDMANN S, KYAMAKYA K, ZAPATER A, et al. An indoor bluetooth-based positioning system: concept, implementation and experimental evaluation[C]//2003 International Conference on Wireless Networks (ICWN), June 23-26, 2003, Las Vegas, USA. Piacataway: IEEE Press, 2003: 109-103.
[6] 吴佳英, 徐蔚鸿, 陈顺明, 等. 基于RSS典型性判定的室内定位算法研究[J]. 通信学报, 2014, 35(Z2): 140-146.
WU J Y, XU W H, CHEN S M, et al. Indoor positioning algorithm research based on the typicality judgement of RSS [J]. Journal on Communications, 2014, 35(Z2): 140-146.
[7] CHUENG K W, SO H C, MA W K, et al. Least square algorithms for time-of-arrival based mobile location [J]. IEEE Transactions on Signal Processing, 2004(52): 1121-1128.
[8] WANG X, WANG Z X, DEA B O. A TOA-based location algorithm reducing the errors due to non-line-of-sight (NLOS) propagation [J]. Journal of China Institute of Communications, 2001, 52(1): 112-116.
[9] CHAN Y T, TSUI W Y, SO H C, et al. Time-of-arrival based localization under NLOS conditions [J]. IEEE Transactions on Vehicular Technology, 2006, 55(3): 17-24.
[10] 张梦丹, 卢光跃, 王宏刚, 等. 基于指纹算法的无线室内定位技术[J]. 电信科学, 2016, 32(10): 77-86.
ZHANG M D, LU G Y, WANG H G, et al. Summary wireless indoor positioning technology based on fingerprint algorithm [J]. Telecommunications Science, 2016, 32(10): 77-86.
[11] BSHARA M, ORGUNER U, GUSTAFSSON F, et al. Fingerprinting localization in wireless networks based on received-signal-strength measurements: a case study on WiMAX network [J]. IEEE Transactions on Vehicular Technology, 2010, 59(1): 283-294.
An indoor positioning system based on distributed LTE network
YANG Yu1, CHEN Ming1, LIU Daqing2
1. China Mobile Group Anhui Co., Ltd., Hefei 230088, China 2. Huawei Technologies Co., Ltd., Hangzhou 310052, China
Indoor positioning technology has important applications in the business and security fields, but there are still existing problems with low positioning accuracy and high deployment costs. An indoor positioning system based on long term evolution ( LTE ) network was introduced. The system was defined on the Huawei distributed pico base station and was used to measure the reference signal strength (RSRP) or time of arrival (ToA) of mobile terminals to multiple access points. To overcome the uplink power control in LTE network, the absolute RSRP or ToA was converted to differential values. The system relied on widely deployed LTE networks to provide seamless location services to terminal devices in a wireless network connection state. It didn’t rely on third-party software or affect network performance. The experimental results show that the average positioning accuracy of Huawei indoor positioning system using time difference of arrival (TDoA) can reach 3~5 m in indoor scenarios such as shopping malls, showing good application potential.
indoor positioning, distributed long term evolution network, distributed pico base station, field strength positioning, delay positioning
TN966
A
10.11959/j.issn.1000−0801.2018185
杨宇(1983−),男,中国移动通信集团有限公司安徽分公司网络部规划室经理、工程师,主要研究方向为GSM、TD-SCDMA、TD-LTE通信技术、室内外定位、HMI技术等。
陈明(1982−),男,中国移动通信集团有限公司安徽分公司工程师,主要研究方向为TD-LTE通信技术、信号仿真、室内外定位、网络优化技术等。
刘大庆(1985−),男,博士,华为技术有限公司工程师,主要研究方向为电磁场理论、天线、5G通信技术、室内定位技术等。
2018−03−06;
2018−05−24
