高精度双轴太阳能跟踪控制系统的设计
2018-07-02张双华文小玲邵鹏程陈立明
张双华 ,文小玲*,2,邵鹏程 ,陈立明
1.武汉工程大学电气信息学院,湖北 武汉 430205
2.湖北省视频图像与高清投影工程技术研究中心,湖北 武汉 430205
随着化石能源的逐渐枯竭,环境问题日益严重,很多国家都致力于新能源的开发,而太阳能以其独特的优势成为现有的新型替代能源[1-3]。光伏发电是目前利用太阳能较为广泛的技术手段,但易受自然环境的影响,稳定性相对较差,且能量密度低。因此在大力发展光伏发电的过程中,对光电转换的效率就有了更高的要求,而光伏跟踪技术就是解决这一问题的有效途径[4]。固定式光伏发电是目前大型光伏电站的主要发电方式,单轴和双轴跟踪的技术虽有少量应用但未形成规模,其主要原因是其跟踪精度不足,设备成本和系统能耗相对较高[5-8]。本文在已有的理论基础上研究设计了一款基于单片机控制的太阳能双轴自动跟踪系统,主要进行了光伏发电系统的跟踪控制策略优化设计和太阳光跟踪光电传感器的研究。系统采用间歇性跟踪的控制算法,每30 min校正一次太阳能电池板的方位。
1 系统总体架构及组成原理
系统采用双轴跟踪和时控+光控模式,同时从方位角和高度角对太阳光线入射角进行全方位实时跟踪,使太阳能电池板始终与太阳光线保持垂直。系统总体结构框图如图1(a)所示,主要由传感器模块、主控板、跟踪执行机构、太阳能电池板四个部分组成。传感器部分包括光源检测传感器,六轴陀螺仪,光照强度传感器,风速风向传感器,限位开关。光源检测传感器可以感知太阳方位的变化,并将信号比较处理后传给主控板;六轴陀螺仪的作用是检测太阳能电池板的位置,将检测到的角度与太阳的实时方位进行比较,再由主控板将偏移量转换为脉冲驱动步进电机转动,这样就形成了闭环调节模式,使跟踪更加精确;光照强度传感器用于检测当前天气情况的变化,根据不同的光照强度切换不同的跟踪模式;风速风向传感器用于大风保护,以保护太阳能电池板在风速过大时不受损;接近开关的作用是对装置进行限位保护,在装置的左右两侧各有一个接近开关,防止电机转动角度过大而损坏装置。参数采样电路主要是采集太阳能电池板的电压和电流;跟踪机械装置主要包括高度角和方位角的两台步进电机,实现对太阳能电池板两个维度的调节。
系统控制流程如图1(b)所示,系统采用混合跟踪的控制方法即为时控+光控的控制模式,时控为粗调,光控为微调。当到达日出时间时系统启动进入时控模式,给出一个Δh和Δγ角度,由控制器发出相应脉冲驱动步进电机转动。因此,可以进行时控的跟踪设计,太阳能跟踪系统每完成一次跟踪周期就自动复位,当进行时控跟踪时每次转动角度均与相对于地球的太阳活动规律相同。在读取某地的日期、时间、经纬度后,通过已有的公式算法得出当地实时的太阳高度角和方位角,再与太阳能电池板的高度角方位角进行比较后得出两个维度的角度差,最后由控制器给出相应脉冲驱动步进电机调整太阳能电池板的位置即可达到太阳能跟踪系统实时跟踪太阳运行轨迹的目的。光控模式是通过使用光电检测传感器模块检测比较太阳光入射角和跟踪系统平面法向量之间的角度差。当角度差值超过额定值时,由控制器发送PWM脉冲信号驱动电机带动系统机械结构部分调整太阳能电池板转动,通过动作减小角度差值到使得入射光再次与系统平面法向量平行,最终达到对入射光线实时追踪的目的。

图1 系统:(a)结构框图;(b)控制流程图Fig.1 System:(a)Structure diagram;(b)Control flowchart
2 太阳光跟踪光电检测传感器的设计
2.1 光电检测传感器的检测原理
选用型号为OSQ50-SPB的四象限光电探测器作为核心检测元件。光电检测传感器的工作原理如图2(a)所示,当光线通过聚光透镜入射时,会在光敏电阻上形成一个电压差,此时可直接给出太阳偏离电池板中心法线的角度,东西方向的为:±tan-1(b/2H),南北方向的为:±tan-1(a/2H)。光线透过聚光镜在第四象限光电探测器上形成一个半径为r的圆形光斑,根据已有经验可知R=2r,此时第四象限光电探测器的探测精度最高。探测器在接受光照时,会在四个象限分别形成IA、IB、IC、ID这4个电流。当四个象限接受光照面积相同时,各个输出信号相同;当光斑在四象限探测器上的位置发生变化,即接受光照面积不同时,输出信号也发生相应变化。假设光斑中心偏离四象限探测器的中心的坐标为(ΔX,ΔY)(K为常数,且与光斑半径r相关),则有:
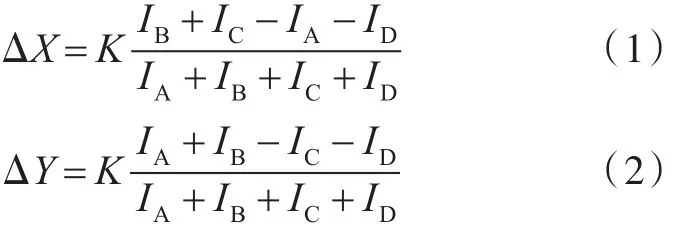
X,Y轴方向分别对应太阳的方位角方向和高度角方向,则ΔX、ΔY分别表示太阳在X、Y轴方向的实际偏差值。当ΔX=0,ΔY=0时,表示太阳光线垂直照射在太阳能电池板上。当ΔX>0,表示太阳方位角方向西偏,反之向东偏;当ΔY>0时,表示太阳高度角方向北偏,反之南偏。

图2 光电检测传感器:(a)原理图,(b)基本结构图Fig.2 Photoelectric detection sensor:(a)Principle diagram ;(b)Basic structure
2.2 光电检测传感器的结构设计
光电检测传感器结构如图2(b)所示,其外部为一个密闭不透光的立方体,在立方体最上面有一嵌入聚光透镜的圆形小孔,聚光透镜的焦点位于底座上方,立方体的长、宽、高分别为a、b、H;在底座上规则的分布着四个光敏电阻R1、R2、R3、R4中间为四象限光电探测器。当太阳光线逐渐由通光孔射入立方体底座,并且四个方向的光敏电阻接受到光照时,系统直接输出一个固定的校正角度使光斑照射在四象限探测器上;当太阳光线透过立方体的通光孔射入底座,并且在立方体的四象限光电探测器上形成一个圆形的光斑时,由于同一时刻太阳光照射在四象限探测器上的光照强度是相同的,此时四象限探测器各部分的输出信号只与光敏面接受光照的面积有关。
3 控制策略及实现
太阳能跟踪控制系统按输出端是否存在反馈可以划分为开环控制、半闭环控制、闭环控制和混合控制四类。开环控制方法主要有时控跟踪、视日运动轨迹跟踪等[9~12],半闭环控制方法则主要是通过光电编码器读取电机转动的角度与光电传感器检测到的太阳位置进行比较得出两个维度的角度差实现对太阳光线的跟踪。按系统轴数分常见的太阳能跟踪方法可分为单轴跟踪和双轴跟踪,常用的单轴跟踪方式有电池板平面倾斜摆放,太阳能电池板只在水平方向上偏转和太阳能电池板只在竖直方向上偏转等;双轴跟踪,即在太阳高度角和水平角两个维度上都能够跟踪太阳。按跟踪模式分太阳能跟踪方法主要有两种:光电跟踪模式和太阳运动轨迹跟踪模式[13~15],本文将针对这两种跟踪控制策略做具体分析。
3.1 时控模式
太阳每天东升西落,对于地球不同位置的观察者来说,在一年中不同的时间点会对应不同的位置。太阳的运动是呈现一定的规律性的,定位太阳的位置需要两个方向的角度来确定,也就是方位角和高度角。以地平坐标系为参考系[5],如图3所示,天顶角为θ,高度角为h,方位角为γ。
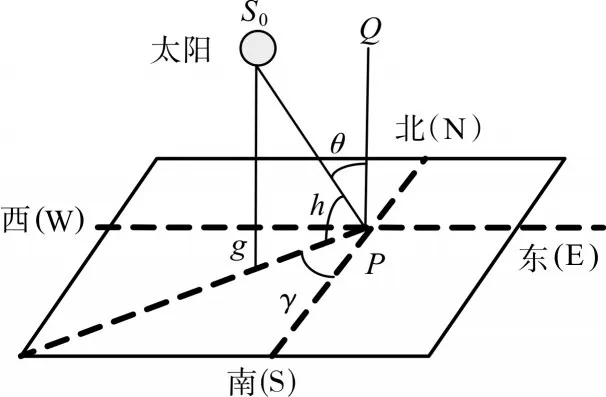
图3 地平坐标系Fig.3 Horizon coordinate system
①高度角的计算
高度角、天顶角、地理纬度、赤纬角及时角之间的关系如式(3)所示:式(3)中,φ为当地纬度;δ为赤纬角;ω为时角。

②方位角的计算
地平坐标系中,方位角用高度角和赤纬角及时角进行计算:

赤道坐标系中的赤纬角和时角可以通过计算转化为高度角和方位角,进而计算太阳所处的位置。只要知道地球上某一位置的经纬度、当地时间和积日时间,就可以通过地平坐标系的计算公式计算出该位置任意时刻太阳的方位角和高度角。
③日出时间和日落时间计算
设tc为日出时间,tI为日落时间,单位为h。则tc和tI可由日出日落时角得出,正午时,太阳的高度角为0,由式(3)和式(4)可得日出日落时角ω1和ω2表达式为:

则有:日出时间:tc=12-ω1/15;
日落时间:tI=12-ω2/15。
3.2 光控模式
由于大气环境的多样性,所以不能保证每天都有充足的光照,光控模式在一定程度上弥补了时控模式的不足,对光照环境分为四种情况:晴天、多云、阴雨天气以及大风雨雪天气,在不同的天气状况下采取不同的跟踪方式进行太阳自动跟踪,从而降低系统能耗,提高系统使用寿命,其基本思路如下:
在晴天光照充足的条件下,太阳光辐射较强,此时跟踪精度最高,光伏发电效率提高越明显,所以系统先采取时控模式进行粗跟踪,然后采取光控模式进行精跟踪;在多云条件下,太阳光线容易被云层干扰,不适合光控跟踪,此时系统采取时控跟踪的方式自动跟踪太阳;阴雨天气条件下,太阳光辐射度较弱,光电转换效率低,系统进入自动休眠模式,这样既能保证跟踪控制精度又能有效的减少系统功耗;在大风雨雪条件下,系统进入自动保护模式,防止因恶劣的自然环境对设备造成不可逆的损坏。
4 跟踪控制系统的软件设计
系统的控制流程如图1(b)所示。首先进行系统初始化包括开启STM32时钟,设置中断优先级,设置串口和GPIO端口等操作。相关初始化完成后,进入判断程序,模式有两种:一种用于自动跟踪,一种则是手动控制。手动控制模式主要用于系统调试,以及当系统出现故障时,手动调回适合的位置。一般情况下默认为自动模式,进入自动模式后,先读取当前的时间,如果时间为非跟踪时段,即日落后到日出前这段时间,则系统休眠,等待到达启动时间。当到达系统启动时段,则进行下一步的判断,以光照强度为判断依据,若为晴天,则进入光控模式,光控模式中读取光电检测传感器的数据,以传感器数据为唯一判断标准,通过不断地读取判断太阳的位置,进行循环调节,实时性高,反应速度快。
若光照强度不足,则进入时控模式,首先调用计算函数,计算出当前时间太阳的角度,再读取陀螺仪的数据,如果存在角度偏差,则驱动电机向对应的方向转动,转动的步数由换算程序计算,当到达指定位置后,则电机停转,若在这段时间内光照条件发生了变化,如光照强度上升,则会跳出时控模式,执行光控子程序。完成一次跟踪后,依次进入下一次循环。
5 结果与分析
对高精度双轴跟踪系统的发电效率进行了试验。试验地点武汉(东经114°23′北纬30°41′,平均海拔23.3 m);试验材料浦江鑫昊光电科技有限公司的单晶硅太阳能电池板,型号为XHGD-100W,峰值功率100 W,开路电压21.5 V,短路电流5.85 A。根据试验地区的经纬度,经过一定的推论分析可知固定式光伏发电的最佳倾角为30°,固定模式与混合跟踪模式下太阳能电池板发电效率的比较,如图4所示,混合跟踪模式为间歇式跟踪,每30 min启动一次,从图4中可以看出两种光伏发电模式的发电效率均在11:00至14:00达到最大,太阳能电池板的发电效率在混合跟踪模式下明显高于固定模式。

图4 两种模式的发电效率对比Fig.4 Comparison of power generation efficiency by two modes
6 结 语
阐述了一种高精度太阳能双轴跟踪系统的设计思路,系统融合了时钟控制和光电跟踪的控制方法,采用具有两级跟踪模式的光电检测传感器模块和一种高效的基于混合跟踪的闭环控制策略。实验结果表明系统在跟踪控制精度上有较大的提升,同时通过间歇性跟踪的方式减少了系统功耗。本文研制的太阳能光电检测模块和优化的控制策略能有效的改善光电转化效率,为提高光伏发电中太阳能电池的光电转换效率提供了新思路。
[1]张国新,杨勇.基于DSP的太阳能双轴跟踪控制系统的设计[J].机电产品开发与创新,2015,28(3):27-29.
[2]沈磊,姜晨.太阳能双轴聚光跟踪控制设计与优化[J].上海理工大学学报,2016,38(2):177-181.
[3]BARSOUMN, NIZAMR, GERARDE.Energy efficient hybrid dual axis solar tracking system[J].Wireless Engineering&Technology,2016,7(1):1-11.
[4]周子云,高云国,邵帅,等.采用四象限探测器的光斑中心定位算法[J].计算机测量与控制,2014,22(7):2154-2156
[5]唐彦琴,顾国华,钱惟贤,等.四象限探测器基于高斯分布的激光光斑中心定位算法[J].红外与激光工程,2017,46(2):57-63.
[6]BANAT F,JUMAH R,GARAIBEH M.Exploitation of solar energy collected by solar stills for desalination by membrane distillation[J].Renewable Energy,2005,32(3):425-434.
[7]BASHAR K.Adaptive control of solar tracking system[J].The Institution ofEngineering and Technology,2014,8(6):426-431.
[8]向欢,匡迎春,姚帮松,等.一种新型太阳能光电自动跟踪系统[J].湖南农业大学学报(自科版),2013,39(1):103-106.
[9]张相明,邓玮,关焕新,等.光伏发电双轴自动跟踪控制系统的设计[J]. 东北电力技术,2013,34(3):48-50.
[10]王要强,王思谨,蒋建东,等.光伏发电系统输出功率特性分析及其平滑控制研究[J].太阳能学报,2016,37(4):847-852.
[11]陈久松,吴运国,余国强.二维度自动跟踪式光伏发电系统[J].通用机械,2017(8):64-67.
[12]凌建辉.太阳能跟踪系统的研究与设计[J].信息技术与信息化,2017(10):141-145.
[13]闫璞,王贵锋.基于单片机技术的室内照明光伏优化供电控制系统设计[J].中国新技术新产品,2018(2):22-24.
[14]王魏.光伏发电双轴跟踪系统的轨迹设计与控制[D].上海:上海交通大学,2013.
[15]秦佳妮,陈捷,封杨.太阳能发电跟踪装置远程测试系统的研究[J]. 机械设计与制造,2018(1):198-201.
