极坐标法测量建筑起重机械安装垂直度
2018-06-29吴伟
吴 伟
(江苏天宙检测有限公司,江苏 南京 211899 )
随着高层建筑的增多,塔式起重机(以下简称塔机)和施工升降机已成“两工地”建筑施工领域不可或缺的人员及货物垂直运输设备。在工作过程中,塔机的塔身主要受自身重力、压力和弯矩的组合力;施工升降机的导轨架主要受自身重力及偏心压力,因此,塔身及导轨架的稳定性是很重要的指标。建筑起重机械安装后的垂直度反映出设计、制造和安装后的综合误差,从很大程度上直接影响其作业过程中的稳定性。
1 安装垂直度的要求
依据中华人民共和国住房和城乡建设部第60号公告,及JGJ 305-2013《建筑施工升降设备设施检验标准》第8.2.3第6条规定:塔式起重机安装后,在空载、风速不大于3m/s状态下,独立状态塔身(或附着状态以下最高附着点以上塔身)轴心线的侧向垂直度允许偏差不应大于4/1 000,最高附着点以下塔身轴心线的垂直度允许偏差不应大于2/1 000;第7.2.6第1条规定:对垂直安装的齿轮齿条式施工升降机,导轨架轴心线对底座水平基准面的安装垂直度偏差应符合表1的规定;对倾斜式或曲线式导轨架的对垂直安装的齿轮齿条式施工升降机,其导轨架正面的垂直度偏差应符合表1的规定;对钢丝绳式施工升降机,导轨架轴心线对底座水平基准面的安装垂直度偏差不应大于导轨架高度的1.5/1 000。

表1 齿轮齿条式施工升降机安装垂直度偏差
2 垂直度偏差的测量
塔机塔身侧向垂直度的测量应在空载状态、臂架相对于塔身0°(x向)和90°(y向)时分别沿臂架方向测量(图1)。

图1 塔机塔身侧向垂直度的测量
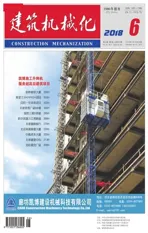
施工升降机导轨架垂直度的测量应在吊笼空笼降至最低点,从垂直于吊笼长度方向(x向)与平行于吊笼方向(y向)分别测量(图2)。
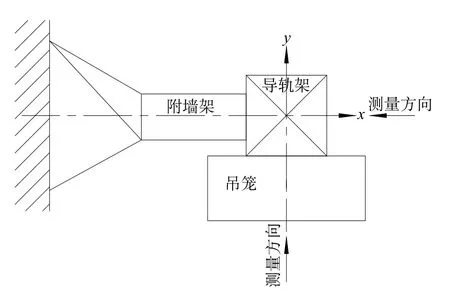
图2 施工升降机导轨架垂直度的测量
测量时,标尺贴靠在塔身或导轨架结构中心的最低处和最高处,用经纬仪读出两处的值。侧向垂直度误差按下式计算

式中:L1为上部测量点标尺读数,L2为下部测量点标尺读数,ΔH为2个测量点件的高度差。
实际测量记录数据时可建立如图1、图2所示的x-y笛卡尔坐标系统,正负号可表示垂直度偏差方向,垂直度偏向正x方向记录为+x,垂直度偏向负x方向记录为-x,y方向垂直度亦是如此。由此可记录为(x,y)、(-x,y)、(-x,-y)、(x,-y)4种记录情况之一。
但在用此方法测量时,只读取了两个方向测量结果的最大值,这样测得的结果,并不能真实地反映出塔身或导轨架的垂直度。同时,为了在测量后数据处理的方便,一般在两次架设经纬仪时成90°夹角放置,但往往由于测量现场环境条件的限制,经纬仪的两次架设很难成90°,这样就要进行相应的计算。
3 垂直度偏差的计算
如图3所示,A、B分别为经纬仪两次架设测量观测点,塔身或导轨架的实际垂直度偏差应该是两次测量位移结果的矢量和(图4)。其中:为在A点测量的位移;为在B点测量的位移;为塔身或导轨架实际位移(垂直度偏差值)。
经数学推导,图3中两次经纬仪架设夹角∠AOB与图4中两次测量位移向量夹角相等。因此可求得:
图3 垂直度测量示意图

图4 测量值及计算

才能反应出垂直度的真实偏差,并且,综合计算出的可能比单独的要大,这样就有会发生分别在x、y方向上测量出的垂直度偏差是合格但实际轴心线对水平面的垂直度不合格的情况。因此,我们可采取极坐标系统来记录垂直度偏差。
4 极坐标系统下的垂直度偏差表示方法
先按实际情况选定的参照x轴方向,测量出两个方向偏差分别为a和b,并考虑两个测量方向夹角α不为90°时,如图5所示。

图5 极坐标系统下的垂直度偏差
那么在笛卡尔坐标系下表示为M(x,y):

转换为极坐标系表示为M(ρ,θ):

在 计 算θ时, 由 于 有(x,y)、(-x,y)、(-x,-y)、(x,-y)4种记录情况,分别对应笛卡尔坐标系Ⅰ、Ⅱ、Ⅲ、Ⅳ象限,那么θ的实际值应该按表1进行修正。
垂直度综合误差按下式计算

表1 θ的修正值

5 结束语
在测量塔机塔身及施工升降机导轨架垂直度偏差时,除按规定的2个不同方向分别测量出偏差值a和b外,还应测量出2个测量方向相对于塔身或导轨架中心线的角度差α。先计算出综合偏差值ρ再计算垂直度综合误差ΔL,来判断垂直度误差是否符合要求。极坐标系统M(ρ,θ)表示垂直度偏差时,综合偏差值ρ更能精确的反映出实际情况,θ则反映出最大偏差方向。