基于试验台的真空管道交通系统气动特性研究
2018-06-27贾文广孔祥鑫程爱平李庆领
□ 贾文广 □ 王 凯 □ 孔祥鑫 □ 程爱平 □ 李庆领
青岛科技大学机电工程学院 山东青岛 266061
1 研究背景
随着经济全球化的发展,人口流动呈现出远程化、周期化的特点。人们对出行的效率要求越来越高,但目前的交通工具,如汽车、火车、飞机等在速度方面受天气条件影响较大。在这样的背景下,真空管道交通(ETT)系统这个概念应运而生,其高速、安全,几乎不受天气影响。
1904年,Robert Goddard提出了ETT系统的设想,之后,美国的ETT系统和瑞士的SwissMetro是较为成功的案例[1-2]。我国也对ETT列车进行了研究,并将其提升到国家战略高度。我国目前已经研究了ETT系统的安全问题[3],并对ETT列车的气动阻力进行分析,得出车速、系统阻塞比和真空度对列车阻力的影响规律[4-6]。世界上第一条ETT系统预计在未来几十年内在我国建成[7]。
虽然对ETT系统的研究工作已经逐步展开,但大多数仅仅局限于在超声速状态下对ETT系统的气动特性进行模拟研究。张耀平等[8-11]对ETT系统的气动阻力特性进行了深入分析。文献[12-15]利用数值计算的方法研究了ETT系统内部温度场、生热机制与传热特性,并深入分析了在超声速状态下列车车头的熵层。以上结论均为数值模拟结果,缺乏试验验证,因此笔者设计了ETT系统试验台,可以完成对ETT系统气动特性的试验研究。
2013年,真空管道磁浮列车试验台在西南交通大学建成,其轨道为磁浮轨道,管道壁材料采用钢化玻璃,造价很高[16-17]。可见,需要搭建具有经济性且能够实现对ETT系统进行气动特性研究的试验台,为此前数值模拟结果提供试验验证,并为后续经济性分析提供依据。
2 ETT系统试验台方案
设计并建造ETT系统试验台的目的是为了分析列车在真空管道中运行时的气动生热和气动阻力特性,以便为后续列车的设计及建造提供理论数据。可见,对试验台有以下要求:能够保证模型列车稳定运行,能够获得高真空度,成本低且易操作。
在设计过程中有四种方案:①直线ETT系统试验台;② 真空室ETT系统试验台;③ 环形ETT系统试验台;④环形管道式ETT系统试验台。经过反复论证,最终确定采用第三种方案,即环形ETT系统试验台。
试验台由主体结构、密封单元、数据采集处理单元和传动单元四个部分组成。操作平台是由外侧挡板、内侧挡板、上端盖及下端盖组成的密闭空间,具有一定的真空度,模型列车在操作平台上运行。采用变频器对电机转速进行控制,并驱动传动轴转动。传动轴的一端与电机转轴固定,另一端与旋转臂的一端固定,旋转臂另一端牵引模型列车在轨道内作圆周运动。分别将温度、压力传感器安装到列车模型的车头、车尾和车身处,可以实时记录模型列车在运行过程中与气动特性相关的参数。这些参数通过蓝牙模块实时传输至上位机,并可保存在相应的数据库中,以便试验结束后调用并分析。在整个试验过程中,利用外置于操作平台的真空泵抽取操作平台内多余的空气,以保证操作平台达到试验要求的真空度。ETT系统试验台结构如图1所示,实物如图2所示。
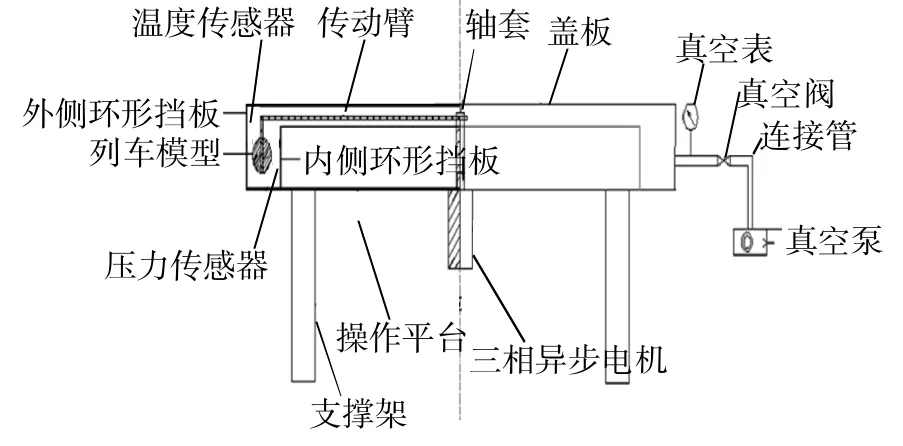
▲图1 ETT系统试验台结构
▲图2 ETT系统试验台实物
试验台利用真空泵保持操作平台的真空度,由操作平台外置的电机带动模型列车在操作平台中运动。转轴及旋转臂与模型列车相连,电机转动时,调节电机上的变频器,就可对模型列车的运行速度进行调节。环形ETT系统试验台的优势如下:①占地面积小,组装简单,节省占地空间和经费投资;②参数易调节,改变列车模型大小,即可改变系统的阻塞比;改变真空泵工况,即可改变系统的真空度;改变电机的转速,即可调节列车的车速;③数据采集方便,自动化程度高,可通过热成像仪、压力传感器、温度传感器、组态软件等直接采集、读取试验数据;④可进行非稳态和稳态试验,列车模型可在环形操作平台上长时间连续运行,直至接近稳态。
试验台的缺点在于高速运行时,模型列车作圆周运动会产生较大的离心力。当然,模型列车与旋转臂连接,在电机的带动下作圆周运动,能有效避免离心力的影响,且离心力的影响可通过误差分析来进行校正。
基于以上分析,采用环形ETT系统试验台的方案是可行的。
3 ETT系统试验台结构
3.1 主体结构
ETT系统试验台主体结构的主要作用是支撑整个机械系统,保证系统各个零部件之间的相对位置不发生改变,同时承受各种力及力矩的作用。主体结构主要包括三个部分:操作平台、操作平台加强筋及支撑架。
3.1.1 操作平台
由于模型列车的运行轨道处于ETT系统试验台中,因此在设计时,操作平台选用10 mm厚的45号钢焊接而成。操作平台的侧面高度为500 mm,以保证模型列车运行,便于试验人员进行试验并维护系统。由于ETT系统试验台的真空度相对较大,为了安全起见,需要计算其作用在上下端盖的作用力。ETT系统试验台属于外压容器,可将其受力情况进行简化,在均布载荷q的作用下,对操作平台上下端盖上产生的最大挠度进行计算。最大挠度Wmax为:

式中:l为作用梁长度,mm;E为45号钢弹性模量,取E=210 GPa;I为钢截面惯性矩,mm4。

式中:b为梁宽度,取b=10 mm;h为梁厚度,取h=10 mm。
3.1.2 加强筋
由计算可知,当ETT系统试验台内部外部压差为0.05 MPa时,在操作平台上产生的均布载荷q为0.5 N/mm。由式(1)、式(2)可得,此时在梁上所产生的最大挠度Wmax=60 mm,超出试验台所能承受的最大挠度值,因此需要对操作平台上下端盖加装加强筋,防止因挠度变化影响模型列车在操作平台上正常运行。加强筋分别安装在操作平台下端盖外侧与上端盖内侧。
3.1.3 支撑架
钢制支撑架位于操作平台下部,具有支撑系统与缓振的作用[18]。
3.2 传动单元
ETT系统试验台传动单元主要由三相异步电机、传动轴及旋转臂三部分组成。在ETT系统试验台上,旋转臂一端固定在传动轴上,另一端牵引模型列车。当电机工作时,通过联轴器、传动轴驱动水平设置的旋转臂作圆周运动,从而带动模型列车运行。在试验过程中,采用变频器调节电机转速,从而实现改变模型列车运行速度的目的。
3.2.1 旋转臂
旋转臂的材料也是45号钢[11]。在带动模型列车作圆周运动的过程中,由于离心力的存在,会发生弯曲变形,因此需要对所设计的旋转臂直径进行校核。旋转臂所受的离心力F为:

式中:L为杆长度,取L=0.86 m;m为列车模型质量,取m=0.76 kg;v 为列车速度,取 v=200 m/s。
通过计算得到F=35 494 N。旋转臂所受到的最大弯矩Mmax为:

通过计算,当v=200 m/s时,旋转臂所受到的最大弯曲矩Mmax=30 525 N·m。
旋转臂上所受到的最大应力αmax为:

式中:A为旋转臂横截面积m2;W为旋转臂抗弯截面系数,m3。

式中:D为旋转臂横截面直径,取D=12 mm。
通过计算可得旋转臂所受的最大应力αmax=180.33 MPa。这一最大应力小于许用应力[α](235 MPa),因此旋转臂选用45号钢,直径D=12 mm,长度 L=0.86 m,可满足模型列车运行的要求。
3.2.2 传动轴
在ETT系统试验台中,传动轴主要承受来自旋转臂和电机的扭力作用,因此设计传动轴主要考虑满足转动时的强度要求。
传动轴扭转切应力τT为:

式中:T为轴所受扭矩,N·mm;WT为轴抗扭截面系数,mm3;n为轴转速,r/min,可根据电机转速确定 n=2 900 r/min;P为轴传递功率,不考虑联轴器的摩擦时电机功率相等,P=5.5 kW;d为传动轴直径。
通过设计,该传动轴的最小直径d=24mm,通过式(7)进行计算,得到传动轴的最大扭转切应力 τT=6.55 MPa。这一扭转切应力小于45号钢的许用扭转切应力[τT](25 MPa),因此满足轴的强度要求。
此时,传动轴的单位长度最大扭转角φ为:

式中:G为轴材料剪切弹性模量,MPa,对于45号钢,取 G=81 GPa;IP为轴截面极惯性矩,mm4,IP=πd4/32;LT为阶梯轴受扭矩作用的长度,mm;Ti、li、IPi依次为阶梯轴第i段上所受的扭矩、扭矩作用长度和极惯性矩;z为阶梯轴所受扭矩作用的段数。
通过计算得到传动轴单位长度最大扭转角极值φmax=0.267(°)/m。这一极值小于许用单位长度最大扭转角[φ](0.5 (°)/m),满足刚度要求。
3.3 数据采集处理单元
在ETT系统试验台中,数据采集处理单元对模型列车在运行过程中的相关参数进行采集,包括模型列车在轨道中转动时车头及车尾的压力、温度等。考虑到模型列车在操作平台中作圆周运动,数据采集处理单元主要为无线传输方式,分为数据采集和数据接收。
数据采集部分主要包括单片机、传感器、蓝牙从机模块和锂电池供电模块。整个数据采集处理单元由锂电池供电,利用单片机和传感器进行通信,从而实时获取传感器采集的数据,数据采集频率为1 kHz。当数据在单片机内滤波后,每间隔250 ms向上机位发送一次,并在发送时通过串口将数据送至蓝牙从机模块。当蓝牙从机模块接收到数据后,会将数据再次转发到与之配对的蓝牙主机模块。
数据接收部分主要包括蓝牙主机模块和通用串行总线转串口模块。当蓝牙主机模块从蓝牙从机模块接收到数据后,会将数据通过通用串行总线转串口模块发送至上位机,并以长度为1 000点的波形进行显示,同时将由传感器实时采集到的压力、温度等参数存储至本地文本,以便在试验结束后进行数据调用。
3.4 密封单元
笔者所设计的ETT系统试验台是真空系统,根据系统要求,采用2XZ-2式旋片真空泵抽取操作平台内多余的空气。为了保证试验过程中操作平台的真空度,试验台的密封单元就显得非常重要。在试验台设计时,操作平台上端盖与操作平台之间没有运动部件,采用O型密封圈加卡扣的形式,密封满足要求。
电机置于操作平台外部,电机转动时驱动传动轴转动,然后传动轴带动置于操作平台内的旋转臂及模型列车作圆周运动,因此传动轴与操作平台下端盖之间的密封属于动密封。由于电机及传动轴转速不太高,且运行温度为常温,因此在套筒和轴之间采用组合密封。组合密封结构的主要特点是分别在轴两端采用基于深沟球轴承、唇形骨架密封圈的组合密封装置,并且在轴和套筒之间充满固体油脂,同时起润滑作用。
4 试验与分析
4.1 试验条件
笔者设计的ETT系统试验台系统阻塞比为0.24,操作平台内空气的温度为13℃,用于研究模型列车运行速度及操作平台内部真空度对列车气动生热与气动阻力的影响。
在试验过程中,为了消除因漏气而产生的误差,对试验台中操作平台处于不同真空度时的漏气率进行测量,得到当操作平台内压力为0.9 atm(1 atm=101 325 Pa)时的漏气速率为 15.4 Pa/s,而在 0.7 atm、0.8 atm压力环境下的漏气速率为23.2 Pa/s。测试时,实际记录的压力值为:

式中:p1为在计算机数据采集界面中显示的压力值,Pa;v为对应压力环境下的漏气速率,Pa/s;t为在真空泵停止工作后到数据记录时的时间间隔,s。
4.2 试验结果分析
在操作平台内气体压力分别为 0.7atm、0.8atm、0.9atm、1atm的情况下,列车以不同速度运行,列车车头车尾的压力变化如图2所示。从图2中可以看出,操作平台中压力保持不变,随着列车运行速度的提高,列车车头的压力逐渐增大,列车车尾的压力逐渐减小。这是因为列车以固定速度在一定真空度的有限真空管道内运行时,真空管道内的空气在高速运行列车的挤压下逐渐被压缩,在列车车头位置会产生一个高压区。这些被高度压缩的空气一部分沿列车运动方向随列车运行而向前推进,并压缩周围低压空气向四周环境扩散;另一部分则进入列车与真空管道之间形成的环隙,并以较高的速度向车尾方向移动,从而在车尾产生涡街效应,形成低压区。列车车速进一步提高时,以上现象更加明显,即在列车车头的气动阻力越来越大,而系统内部的最小压力值则越来越小,同时车头车尾间的压差阻力也越来越大。当阻塞比与真空度为定值时,压差阻力与列车速度成二次方关系。

▲图2 列车车头车尾压力变化曲线
当系统压力为0.7atm时,在不同列车速度的情况下进行三维建模,应用数值软件进行数值模拟,将试验所得的车头车尾压差与数值模拟的压差进行对比,如图3所示。由图3可知,试验数据曲线趋势与模拟数据曲线趋势相吻合,两者最大误差不超过10%,可以认为ETT系统试验台的设计是成功的。
模型列车在阻塞比为0.24的管道内运行时,不同真空度下车头车尾压差变化如图4所示。由图4可以看出,在真空度为定值时,列车车速逐步提高,车头车尾压差逐渐增大,这是由于车头处气动阻力产生的压力增大,而车尾处卡门涡街使车尾压力减小造成的。
在系统阻塞比为0.24时,不同运行速度下列车车头车尾的压差变化如图5所示。从图5中可以看出,在同一运行速度下,随着真空度的提高,车头车尾的压差逐渐减小。
5 结论
通过多种方案筛选,最终确定环形ETT系统试验台能够满足试验要求。ETT系统试验台分为主体结构、密封单元、数据采集处理单元和传动单元,原理明确,操作步骤简单安全,将ETT系统的研究由模拟阶段引入试验阶段。
由试验所得数据可知,当系统压力为定值时,列车车速越高,车头气动阻力越大,车头车尾压差越大,车尾压力越小。当车速为定值时,系统压力越低,列车车头气动阻力越小,车头车尾压差也越小。
通过分析试验数据可知,在模型列车运行时,列车车速总是大于气流速度,列车向前运行不断推动车头部分阻碍列车前进的气流前进,从而产生气动阻力,验证了此前模拟研究数据变化规律的正确性。

▲图3 列车车头车尾压差对比
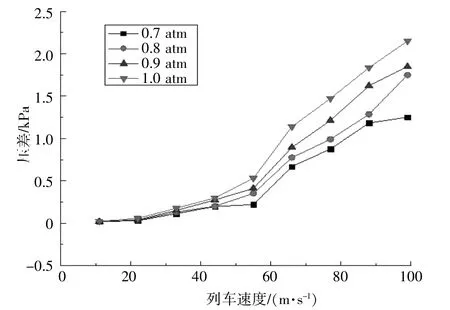
▲图4 不同真空度下列车车头车尾压差曲线

▲图5 不同运行速度下列车车头车尾压差曲线
[1]OSTER D.Evacuated Tube Transport: US5950543[P].1999-09-14.
[2]SCHETZ J A.Aerodynamics of High-Speed Trains [J].Annual Review of Fluid Mechanics,2001,33:371-414.
[3]张耀平,于晓东.真空管道运输安全问题成因分析[J].交通运输工程与信息学报,2006,4(3):57-63.
[4]刘加利,张继业,张卫华.真空管道高速列车气动特性分析[J].机械工程学报,2013,49(22):137-143.
[5]刘加利,张继业,张卫华.真空管道高速列车气动阻力及系统参数设计[J].真空科学与技术学报,2014,34(1):10-15.
[6]KIM T K, KIM K H, KWON H B.Aerodynamic Characteristic of a Tube Train [J].Journal of Wind Engineering and Industrial Aerodynamic,2011,99(12):1187-1196.
[7]沈志云.关于我国发展真空管道高速交通的思考[J].西南交通大学学报,2005,40(2):133-137.
[8]ZHANG Y P,OSTER D,KUMADA M et al.Key Vacuum Technology Issues to be Solved in Evacuated Tube Transportation[J].Journal of Modern Transportation,2011,19(2):110-113.
[9]周晓,张耀平,姚应峰.真空管道中高速列车空气阻力数值仿真[J].科学技术与工程,2008,8 (6):1626-1628.
[10]周晓,张殿业,张耀平.真空管道中阻塞比对列车空气阻力影响的数值研究[J].真空科学与技术学报,2008,28(6):535-538.
[11]周晓.真空管道运输高速列车空气阻力数值仿真[D].成都:西南交通大学,2008.
[12]贾文广,董晨光,周艳,等.基于阻塞比的真空管道交通系统热压耦合研究[J].工程热物理学报,2013,34(9):1745-1748.
[13]LI Q L, JIA W G, DONG C G,et al.Numerical Research of Thermal-Pressure Coupling Effect on Blockage Ratio in the Evacuated Tude Transportation System[J].Key Engineering Materials,2013,561:454-459.
[14]周艳,刘海龙,刘英杰,等.真空管道交通系统超音速状态下熵层的研究[J].真空科学与技术学报,2014,34(8):775-780.
[15]HEMIDA H,KRAJNOVICS.LES Study of the Influence of the Nose Shape and Yaw Angles on Flow Structures around Trains[J].JournalofWind Engineering and Industrial Aerodynamics,2010,98(1):34-46.
[16]庞勇.“真空管道运输” 纽约到北京只需2小时[N].新华每日电讯,2013-07-19(6).
[17]王洋,王树奇,魏敏先.45钢磨损性能和磨损机制的研究[J].热加工工艺,2010(16):11-14.
[18]刘英杰.真空管道高速交通系统气动特性试验装置的研制[D].青岛:青岛科技大学,2015.
