基于MATLAB的汽车主动悬架模糊控制系统仿真
2018-06-25王建锋李永新
马 娇 朱 炎 王建锋 李永新
(西京学院机械工程学院,陕西 西安 710123)
0 引言
汽车悬架主要包括:弹性元件、减震器、传力装置等三部分组成,作用在车轮与车架间的一切力及力矩都由其传递,路面传到车身的冲击载荷也由其缓和,由此引起的承载系统的震动同时也得到衰减。所以,悬架系统的性能直接影响着整车的操纵稳定性、行驶平顺性和乘坐舒适性。
目前,市场上汽车悬架的种类很多,主要分为:主动悬架和被动悬架。其中,被动悬架在汽车市场中占据主导地位。该悬架在凹凸路面或汽车转弯时,都会由于受到冲击而引起形变,悬架中的弹簧则能起到减缓冲击的作用,最后弹簧释放能量产生的振动通过减振器被吸收。近几年,随着在车辆中应用微处理器,以及作动器、变刚度弹簧、可调减振器等技术的重大突破,主动悬架的研究被越来越多的学者开始关注。
汽车主动悬架是一个动力驱动系统,它依靠一定的能量给悬架部件提供动力并且控制能量大小,它的阻尼特性及弹性特性不固定,阻尼器和弹簧被取代,能够根据路面凹凸情况及时主动的调整和产生车轮与车身之间所需悬架的控制力,以此来减轻车身的振动。使悬架处于最优减震状态,从而使汽车操纵稳定性、行驶平顺性以及乘坐舒适性有所改善。本课题采用模糊控制车身加速度悬架动绕度作为悬架性能的评价指标,对1/4车体两自由度主动悬架的数学模型在MATLAB/Simulink的仿真环境中,进行一系列仿真,得到悬架在时域内的动态响应。
1 主动悬架数学模型
汽车悬架是一个比较复杂的动力与机械系统,但是从实际研究出发,可用弹簧阻尼器的形式代替汽车主动悬架系统。采用简化的二自由度1/4车体模型来研究凹凸路面的激励引起的汽车垂向振动。但对实际的车辆系统而言,简化的1/4车体模型需要假设一定的条件 :(1)车身系统简化为簧载质量;(2)车轴及其相连车轮为非簧载质量;(3)在中心线上轮胎与路面为点接触;(4)仅考虑轮胎的刚度作用,轮胎阻尼则忽略不计;(5)车辆无侧倾振动,不存在侧向位移,有俯仰振动和垂直振动,无横摆振动;(6)发动机和传动系统的振动对车身的影响不作考虑。
如图1所示,m1为车轮质量,m2为车身质量,k1为轮胎刚度,k2悬架弹簧刚度,(x1-x2)为车身垂直位移,x1-x0为轮胎垂直位移,C为悬架等效阻尼系数,U为主控制力。值得注意的是:为了减小振动,在轮胎质量m1和车身质量m2之间施加主动控制力U,该主动力的大小由检测到状态变量的车身加速度和车身车轴相对位移变化量,轮胎加速度,轮胎与地面相对位移计算求得,这些反馈量分别有加速度传感器和超声波测探传感器测得。悬架系统中加入主控制力后就能极大地提高汽车的舒适性,控制目的是为通过调整控制力U,使得汽车在任何路面行驶时,车身振动小,且振动衰减快。
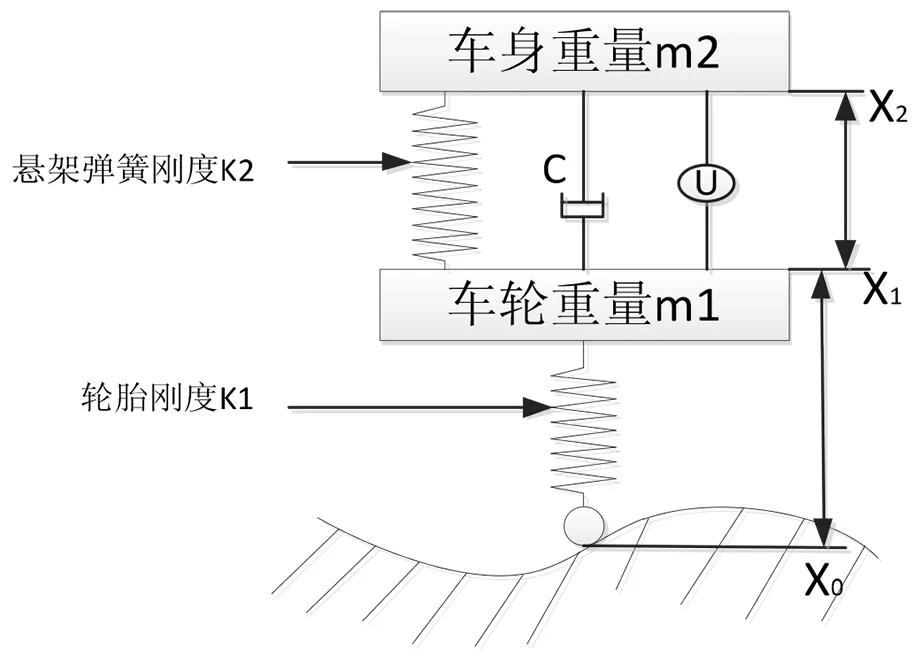
图1 1/4车体悬架系统简化模型
系统的微分运动方程如下:
(1)
m2×x2=-k2(x2-x1)+C(x2-x1)+U
(2)
取状态变量:
得到状态方程:Z2(t)=A2(t)+B2×U(t)+C2×x(t)
(3)
2 模糊控制器设计
模糊控制其控制算法基于若干条控制规则,算法简单快捷,适合于像汽车这一类的部分参数经常变化以及在不同道路条件下工作的非线性,时变动态系统。
2.1 定义输入输出变量和确定论域
模糊控制器选用双输入单输出的方式,以速度v、加速度a分别作为误差、误差变化率的输入变量,以u作为输出变量。模糊子集为:v=a=u={NB,NM,NS,ZE,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大}。速度v、加速度a和输出变量u的论域值相同,均为:[-3,3]={-3,-2,-1,0,1,2,3}。
2.2 建立隶属函数
采用不同的模糊子集隶属函数对汽车悬架垂直隶属度的仿真有一定的影响,常见的模糊子集隶属函数主要形状有:三角形、梯形、高斯型等,对控制效果的影响程度由不同的隶属函数形状决定,输出结果最为平滑,波动最小的是三角形隶属度函数。如图2所示,输入、输出变量的隶属度函数采用三角分布函数。
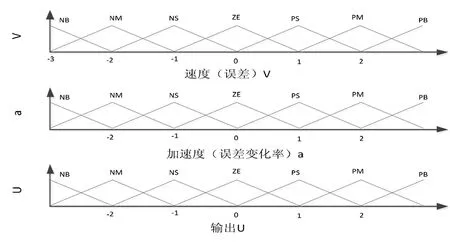
图2 v、a、u的隶属度函数
2.3 控制规则的确定
模糊控制器的一个重要组成部分为模糊控制规则,它用语言的方式描述模糊关系,即控制器输入量与输出量之间的关系。首先给出一种模糊控制规则,后经不断调整,从而得到最终模糊控制规则。或者由专家或熟练操作人员的控制经验,以推理的方式给出模糊控制规则。本控制器两个输入量分别采用7个语言模糊集来描述,形成了49条控制规则。由于车身加速度a和车身速度v这两个量都是需要减小的,因此,系统的模糊规则用试错法进行调整,最终得到的模糊控制规则如表1所示。
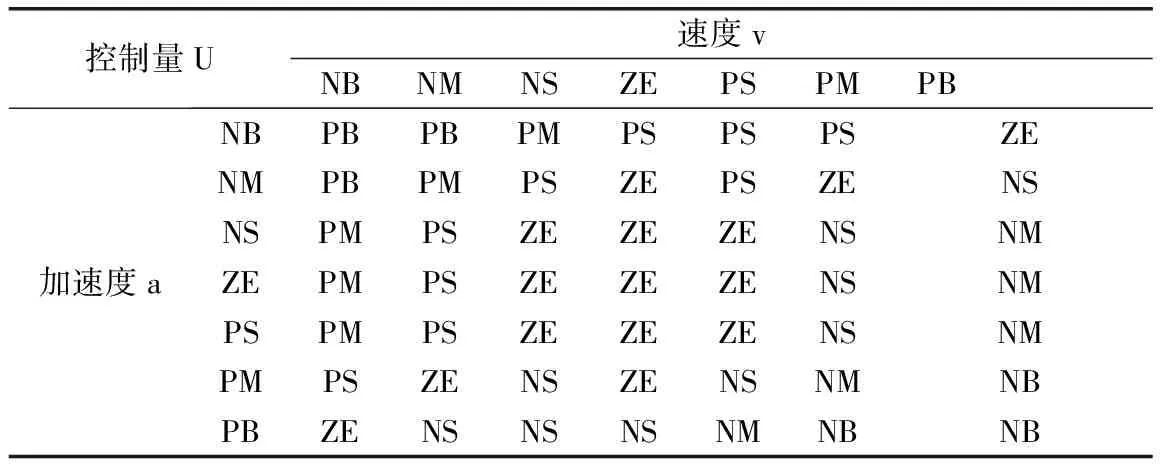
表1 模糊控制规则表
图3为控制规则曲面图,通过分析图形特点,可以看到它形成了的梯度分布,说明所设计的模糊系统从速度v和加速度a到输出u参数变化量的模糊映射与理论设计匹配良好。
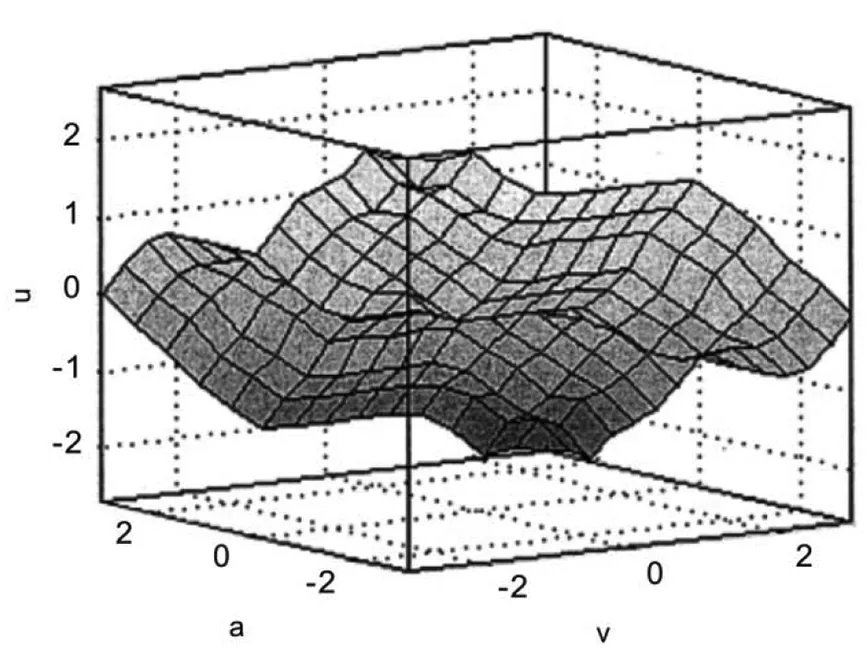
图3 控制规则曲面图
2.4 解模糊判决
解模糊判决有系数加权法,最大隶属度法,隶属度限幅元素平均法,面积重心法。根据实际情况,本控制系统采用面积重心法。
(4)
(4)式中xi是指模糊子集,uNxi是指隶属函数。
3 系统仿真与分析
3.1 仿真参数的确定
仿真计算采用某轿车参数,其参数如表2所示。

表2 模型仿真参数表
3.2 构造积分白噪声路面

利用MATLAB/SIMULINK中工具箱构造出积分路面白噪声,如图4所示。
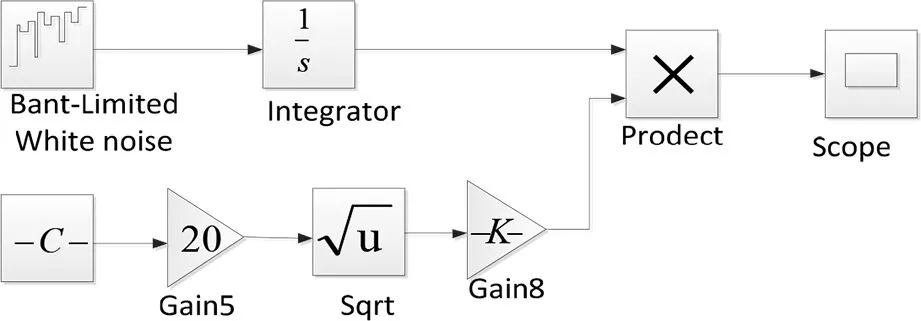
图4 积分白噪声随机路面模型
如图5为以上仿真图产生的随机路面轮廓。
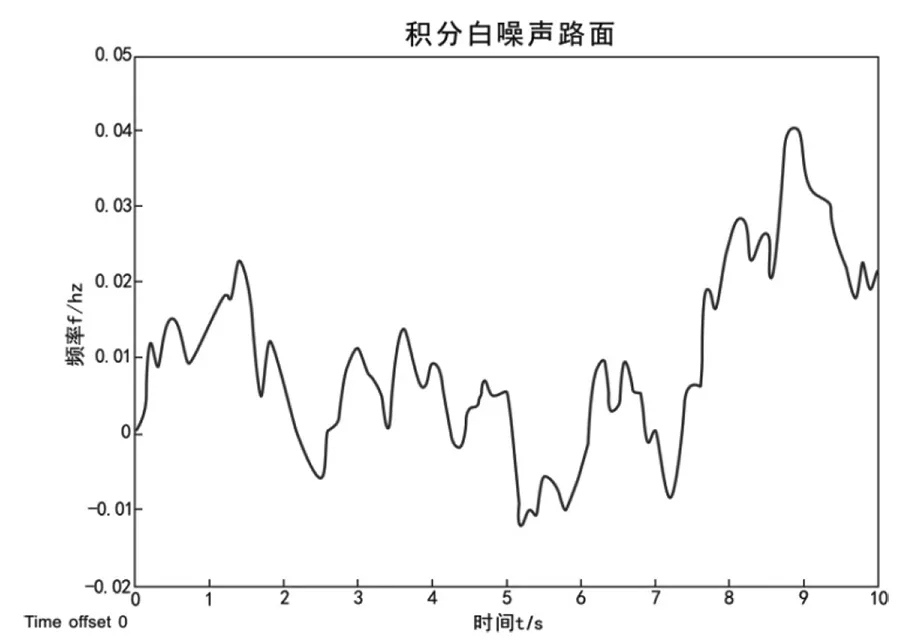
图5 积分白噪声路面
3.3 建立仿真模型
由上面所建悬架力学模型以及推导的数学微分方程,利用MATLAB/SIMULINK提供这些模块便可以方便的建立如图6所示的仿真模型,然后通过输入参数,在模糊控制器中输入通过模糊推理系统编辑器编辑出来的文件,就可以从示波器中读取车身加速度图和车身速度图。
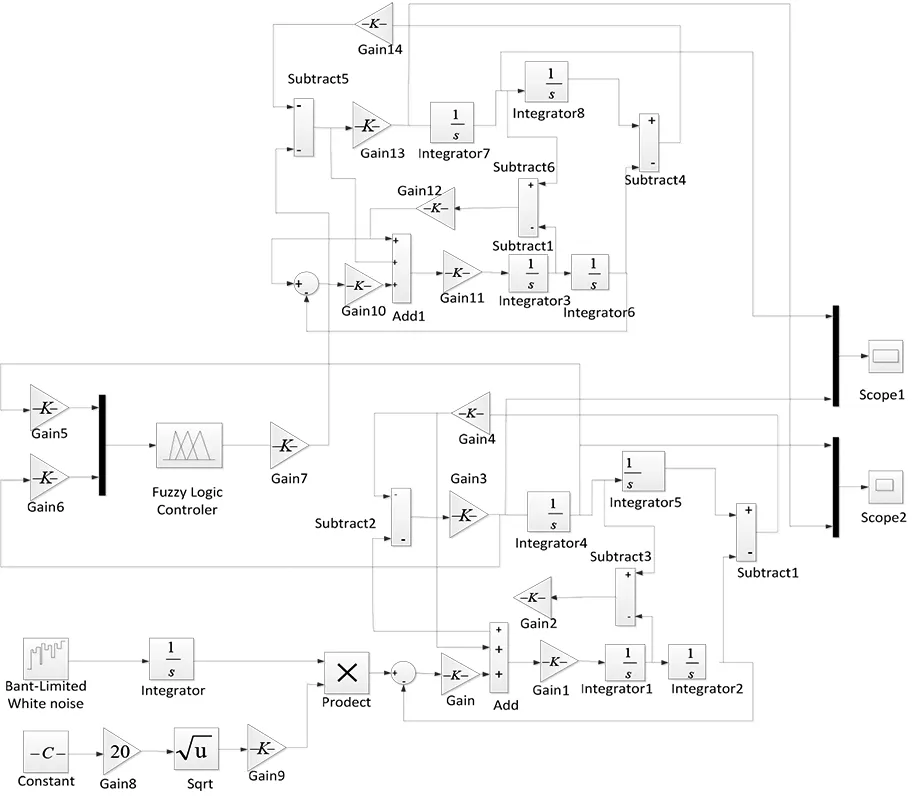
图6 Simulink仿真模型图
以白噪声为路面输入信号得到车身加速度和车身速度仿真结果如图7所示。
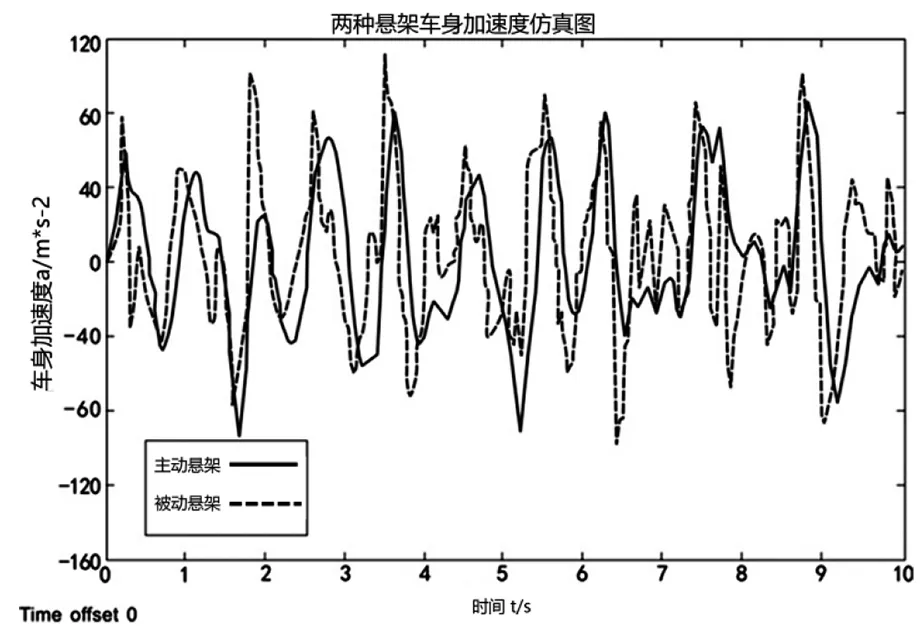
图7 主/被动悬架车身加速度图
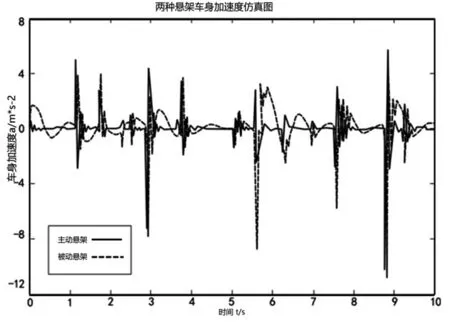
图8 主/被动悬架车身速度图
3.4 仿真结果分析
图7、8中虚线代表被动悬架的仿真曲线,实线代表模糊控制的主动悬架的仿真曲线,从图中可以看出,经过模糊处理后的悬架系统,速度和加速度的峰值均有所降低,波形衰减较为明显,充分说明在白噪声输入下,模糊控制能够调整悬架,使之适应不同的路面,以保证悬架具有最佳的平顺性和操纵稳定性。
4 结论
本文通过研究主动悬架的控制算法,使之根据汽车的运行工况和路面条件能自动跟踪调解悬架阻尼系数和刚度,从而达到最佳状态,以确保悬架具有良好的操纵稳定性和平顺性。模糊控制作为主动悬架的控制方法之一,其有着其他控制方法不可比拟的优点,通过比较所得结果可得出,悬架采用模糊控制,系统的平顺性有了较大提高,而且在一定程度上改变了悬架系统的行驶安全性,充分说明本次设计的模糊控制控制汽车主动悬架对道路的适应性较强,是一种较为理想的模糊控制器。另外,通过运用MATLAB/SIMULINK工具箱对整个系统进行有效合理的仿真,也证明了在主动悬架系统中使用模糊控制方法来实现控制过程的可行性。
[1] 吴慧峰.基于模糊控制的汽车主动悬架系统仿真研究[J].计算机真,2012,(03):363-366.
[2] 阮观强,叶本刚.基于MATLAB仿真的汽车主动悬架与被动悬架的研究[J].上海电机学院学报,2007,(04):284-287.
[3] 王遂双.汽车电子控制系统的原理与检修[M].北京:北京理工大学出版社,2005,(8):13-15.
[4] 丁科,侯朝桢.车辆主动悬架的自适应控制研究[J].北京理工大学学报,2001,(06):706-709.
[5] 邱英杰.基于模糊控制的半主动空气悬架对平顺性影响的仿真分析[J].机械设计与制造,2009,(11):137-139.
[6] 马秀坤,马学军.基于PC-Based 的温度智能控制系统研究[J].微计算机信息,2007,23(7):55-56.