提取运动目标稳健角点算法
2018-06-15宋俊芳
宋俊芳
西藏民族大学信息工程学院,陕西咸阳 712082
角点作为目标局部信息最小的一种描述,它对天气、光照等环境变化有较强的适应性和旋转不变性,在不丢失图像数据信息的前提下,用它进行目标的匹配和跟踪,可以大大减少算法的运算量,提高匹配跟踪的即时性。尤其是最近几年,角点被用在目标跟踪、行为分析与理解、交通事件和参数检测等众多领域,取得了较好的效果。综述其起源,出现最早的角点检测算法是1977年的Moravec算法,借鉴其思路,后来又陆续出现了经典的Harris算法和SUSAN算法。
但这几个经典算法都是基于图像灰度特征的,各有优缺点。如Harris算法,它实际上是对Moravec算法的一种改进,由于实现公式中加了高斯平滑部分, 有效增强了其鲁棒性和抑噪能力,但高斯平滑也使该算法的计算量迅速增加,结果导致提取角点的速度变得较为缓慢。而SUNSAN 算法在计算模板面积时需要将像素点的灰度值离散化, 这就带来了较大的量化误差, 容易导致边缘点和角点的判断混乱,因此,它不适合于序列图像的角点跟踪,尤其是对于交通图像序列这种纹理结构相对复杂的场景,检测效果更是不理想。虽然后面也有很多学者针对这些方法的弊端,提出了很多改进算法,但都没有考虑到速度这一指标,当遇到大数据的处理(交通视频) 时,执行速率明显较慢。在同一时期,也有很多研究者不再局限于用图像的灰度特征来检测角点,他们尝试用边缘特征来检测角点,如基于边缘链码的角点检测、基于小波变换的角点检测和基于曲率尺度空间的角点检测。这类方法的弊端是角点的检测精度取决于边缘轮廓是否被准确提取,一旦轮廓提取不准确,那么后面的角点定位将出现大的偏差。所以,这类方法的独立性较差。
面临这些问题,本文提出先通过运动目标检测将角点的搜索范围限定到目标体上,然后再针对目标窗用角点检测算法进行扫描,这样不仅可以提高角点的搜索速度,还可以抑制噪声的干扰。在这之后,还需要对角点检测的结果作进一步优化,本文尝试了基于区域检测属性的角点优化算法,其最终目的是希望留下的角点不仅稳健性好,且分布均匀。
1 基于改进帧差法的角点区域分割
如果在整幅图像内提取运动目标体上的稳健角点,不仅算法耗时大,无法保证系统的实时性,而且提取的结果受背景区域内噪声的干扰准确度明显不高。为解决这一问题,在角点检测之前,先通过运动目标分割将稳健角点的搜索范围初步缩小到运动区域内,除掉环境的干扰。
运动目标分割本文采用改进的帧差法实现,将当前帧?与第?帧和第?帧分别做差分,并用两次差分的结果D1 和 D2做“与”运算,得到运动目标的特征信息。这不仅解决了传统帧差法中可能出现的无法完整地检测出运动目标和漏检的问题,还有效地避免了单次帧差结果包含非运动目标区域的现象。
2 基于区域检测属性的角点优化算法
在运动区域窗内可以用几种传统算法来检测角点,重要是要对角点进一步做优化。本才采用基于区域检测属性的算法对角点进行优化筛选。
该算法先尝试由用户在上位机调试出一个最佳的区域划分方式,将场景按照某一大小的模板分区,分区后通过上位机人工设置各区域的检测属性,用算法对属性为T的区域进行处理,对属性为F的区域直接舍弃。
对图像的区域划分初步考虑平均分区,由于每个摄像机安装的路段、位置、角度都不一样,所以在设备安装之后需要调试出一个最佳的划分方式,比如图1所示的场景,将场景等分为8×7个块最佳,图像区域划分如图1中(a) 图所示。
分区后的图像,通过上位机人工设置各区域的检测属性,如图1中(b) 所示,如果是不需要检测的区域,属性设置为F,需要检测的区域,属性设置为T。
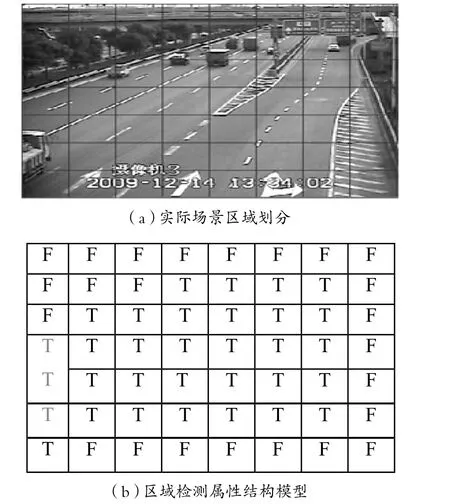
图1 实际场景区域划分与检测区域属性标识
划分区域后,在一个区域内(T区域) 最多只保留一个角点,且角点需是该区域内可跟踪度最大的特征点,也就是区域中角点度量值最大的特征点,它们的影响度也最高。如果:
那么在这个区域内就只保留角点,其余角点除掉。公式中表示T区域内对应角点位置(x,y) 处的度量值,区域的宽度范围是[ ,left right],高度范围是[ ,bottom top]。
下面对图1场景中第一辆卡车的车尾部分(箭头指示的区域)用此算法选择最优角点。这部分位于检测属性结构图中第一列的4,5,6行,检测属性都是T,角点的度量值如表1所示,具体选择过程如图2所示。
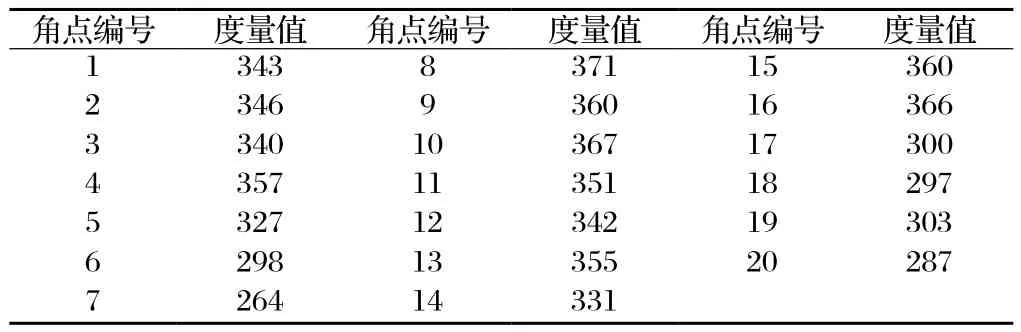
表1 车尾部分的角点度量值
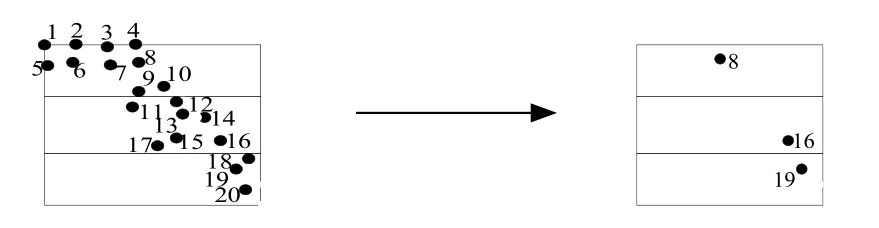
图2 基于区域检测属性的角点优化过程示意图
落入第一列第4行区域内的角点有1,2,3,4,5,6,7,8,9,10这10个角点,角点度量值最大的8号角点被留下,落入第一列第5行区域内的角点有11,12,13,14,15,16,17这7个角点,角点度量值最大的16号角点被留下,落入第一列第6行区域内的角点有18,19,20这三个角点,角点度量值最大的19号角点被留下,其余角点都被删除,最终在车尾部分只留下8,16,19这三个优质特征角点,认为是最稳健的角点。
3 结语
基于改进帧差法和区域检测属性的角点选择算法确实实现了去除冗余角点的目的,留下的角点也多选择在车辆尾部、后视镜等特征明显的区域,可以很好地用于交通场景中的车辆角点获取。
[1] Dey N, Nandi P, Barman N, et al.A Comparative Study between Moravec and Harris Corner Detection of Noisy Images Using Adaptive Wavelet Thresholding Technique[J], 2012.
[2] 杨莉,张弘,李玉山.一种快速自适应RSUSAN角点检测算法[J].计算机科学,2004(5) :198-200.
[3] Zeng Z Y, Jiang Z Q, Chen Q, et al.An Improved Corner Detection Algorithm Based on Harris [J]. 2012: 717-721.
[4] 黄 华 川, 张 涅 萍.基于协方差矩阵和小波变换的角点检测算法[J].制造业自动化, 2010,32(11) : 21-22.
[5] 张 小 洪, 雷 明, 杨 丹.基于多尺度曲率乘积的鲁棒图像角点检测[J].中国图象图形学报, 2007,12(7) : 1270-1275.
[6] 夏 辉,穆希辉,马振书,等.基 于 支 持向 量机的角点检测方法研究[J].计算机应用与软件,2009, 26(1) :230-231.
[7] 陈磊,邹北骥.基于动态阈值对称差分和背景差法的运动对象检测算法[J].计算机应用研究, 2008,25(2) :488-494.