基于矢量阵的鲁棒自适应舰船噪声检测算法研究
2018-06-05吕曜辉余德本
吕曜辉 ,余德本 ,张 晓 ,韩 笑
(1.哈尔滨工程大学,哈尔滨 150001;2.中国科学院声学研究所,北京 100190;3.吉林大学,长春 130012)
0 引 言
自适应波束形成技术作为阵列信号处理的一个重要研究方向,在雷达[1]、声纳[2]、移动通信[3]、语音信号[4]等众多领域中得到了大量的应用。常规波束形成(Conventional Beamforming,CBF)的角度受到“瑞利限”的约束,分辨率较低,不能分辨在瑞利限以内的目标,无法抑制强干扰,在复杂水声环境下算法性能下降[5]。自适应波束形成算法在导向向量已知且快拍数足够的情况下拥有良好的抑制干扰的能力且具有高分辨率的优点。但在实际应用中,由于导向向量存在误差,算法鲁棒性明显下降[6]。这是因为在实际过程中存在阵列位置、幅相以及方位估计等误差,实际中协方差矩阵还包含期望信号。对于柔性长线阵,阵元位置一直在变化,且对于快速移动的目标,观测时间过短,快拍少。在这种情况下,MVDR算法的性能快速下降。针对MVDR存在的问题,人们提出了一些提高其性能的算法。Li[7]提出了基于导向向量估计的稳健Capon波束形成算法(RCB),用估计的导向向量做波束形成,使导向向量误差在一定范围内变化时,算法仍有较高的稳健性。RCB算法使用牛顿迭代法求解Lagrange乘子,实时性较差,戴凌燕等人[8]推导了近似解,但近似解过程中的假设造成了计算精度和输出SINR下降。当导向向量误差太大时,Nai等人[9]提出了利用迭代思想的方法来估计导向向量,每次迭代相当于一次RCB算法,不过此方法计算量大,且干扰信号功率大于期望信号功率时,可能收敛到干扰信号的导向向量,存在收敛问题。
基阵随着阵元的增加,提高了阵增益和方位分辨率,为了实现对安静型潜艇的探测,声纳越来越多的使用多阵元的大阵列检测微弱信号。近年来矢量水听器在声纳设备上得到了大量的应用,相对于声压阵,使用矢量阵能扩展阵列孔径提高处理增益,同时克服左右舷模糊的问题[10]。
针对目标快速移动时,快拍数减少,没有足够的观测数据的情况,本文根据满秩RCB算法的思路,提出了一种改进的RCB算法,通过对小块拍的接收数据矩阵进行奇异值分解,采用数据矩阵避免形成协方差矩阵,对满秩RCB算法的修改,得到了改进的RCB算法。最后用仿真实验和海试实验证实了该算法的正确性。
1 信号模型
假设M个二维水听器构成直线阵,目标位于远场,如图1所示,第i个阵元的坐标为目标的单位矢量为,其中 θ为目标方位角。则目标对应的波矢为信号角频率,c为声速。
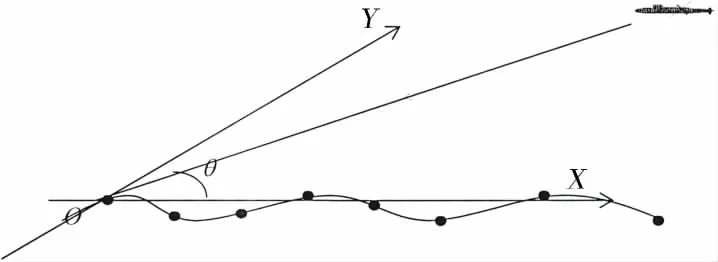
图1 声矢量阵示意图Fig.1 Sketch map of acoustic vector array
阵列的导向矢量在频域表示为:

假设测量区域存在一个窄带目标与K个窄带干扰,则阵列的输出为:

其中:为目标加干扰,E(ω )为噪声。
在实际应用中,阵列输出的协方差矩阵由阵列输出快拍估计得到:

式中)表示对应角频率ω的第k个快拍,N为快拍数。
2 基于导向矢量的RCB算法
MVDR算法原理如下:

其中:w为自适应权系数,s为期望的导向矢量,R为数据协方差矩阵。上式的含义为在保证目标信号不失真的条件下,调节权矢量w使得波束形成输出的功率最小,通过拉格朗日乘子法求解(4)式,得到MVDR的权矢量为

MVDR波束形成输出功率为:

根据(4)式,任何偏离期望导向矢量的信号都会被抑制。导向矢量的偏差越大,信号被抑制得越严重,表现为信号的功率输出降低,功率谱的动态范围缩小。基于MVDR算法存在的问题,Li提出了基于导向矢量估计的稳健Capon波束形成(RCB)算法,RCB算法可表示为如下优化问题:

其中:s为期望导向矢量,ε为导向矢量的误差限。为了避免方程收敛到无意义的零点,必须使ε。 应用拉格朗日乘子法求解(7)式:得到真实导向矢量的估计如下:

式中:λ为拉格朗日乘子。将上式代入约束可得到λ满足的非线性方程为:


假设γmin和γmax分别为R的最小特征值和最大特征值,根据(10)式,有以下不等式成立:

最终得到λ满足的解区间为:

应用牛顿迭代法或二分法求解(11)式。将求得的λ代入(8)式,得到当导向矢量误差范围为ε时的真实导向矢量估计
最后,得到RCB的信号功率估计如下:

将式代入(5)式得稳健自适应波束形成的权矢量为

可以看到,RCB算法实际上也属于对角元加载算法,但是与其它的算法不同,其对角元加载因子λ-1直接由导向矢量的误差ε控制。
3 改进的RCB
上面推导的RCB算法适用于协方差矩阵R为满秩的情况。由(4)式可知,协方差矩阵满秩则有快拍数至少大于阵元数M。但在实际情况下,观测时间是有限的,特别是对于长线阵,由于形成的波束窄,快速运动的目标很容易跨过多个波束,积分时间不可能过长。因此大多数情况下,快拍数小于阵元数,R为秩亏矩阵,所以需要将上述RCB算法改进使其能应用于秩亏情况。
已知为测量的快拍,K为快拍数,记数据矩阵为则阵列的协方差矩阵为若已知的奇异值分解如下:

由于噪声的影响,实际的协方差矩阵应该是满秩矩阵,假设噪声是各向均匀的白噪声,方差为α,则得到估计的协方差矩阵为利用关系式则(10)式可以修改为:

综合(11)式得到秩亏情况下λ满足的解区间为:

最后得到秩亏情况下RCB的功率估计如下:

值得注意的是当K=M时,上式化为(12)式。即化为满秩情况下的RCB信号功率估计。此外需要补充说明的是参数α的选取。α是人为设定的噪声功率,α越大,则噪声本底越高,则目标分辨能力降低。α越小,则噪声本底小,波束形成输出功率的动态范围大,不利于弱目标的显示。
4 仿真结果
为了验证秩亏RCB的性能,并将其推广应用,对其进行了试验验证。所使用的长线阵为柔性阵,由32个均匀间隔的矢量水听器组成。在实验过程中假设水听器在一条直线上。空间从远场入射三个互不相关的窄带平面波,其中一个期望信号,两个干扰,干扰的干噪比分别为INR=30 dB,35 dB,入射角分别为30°,70°。各通道的噪声为互不相关的高斯白噪声,噪声功率为0 dB。期望信号的入射角度和信噪比随仿真条件的改变而改变。
4.1 分析波束指向存在误差情况下的对角加载因子
假设期望信号来自5°方向,实际的波束形成方向为6°,存在1°的指向误差。期望导向向量和实际导向向量间的误差模为图2为不同输入SNR和不同ε下的对角加载因子情况。图中数据是进行100次蒙特卡罗实验的平均结果。图2(a)和(b)是常规RCB仿真结果,快拍数N=200。图2(c)和(d)为改进的RCB算法仿真结果,快拍数N=20。由图2可知,本文推导的改进的RCB算法加载因子值虽然高于常规RCB算法的加载因子值,但随着SNR和误差限ε的增加,这两种算法有相同的变化趋势,都逐渐增大。这说明本文推导的改进的RCB算法在小快拍情况下具有与正常快拍数时RCB算法相似的性能。
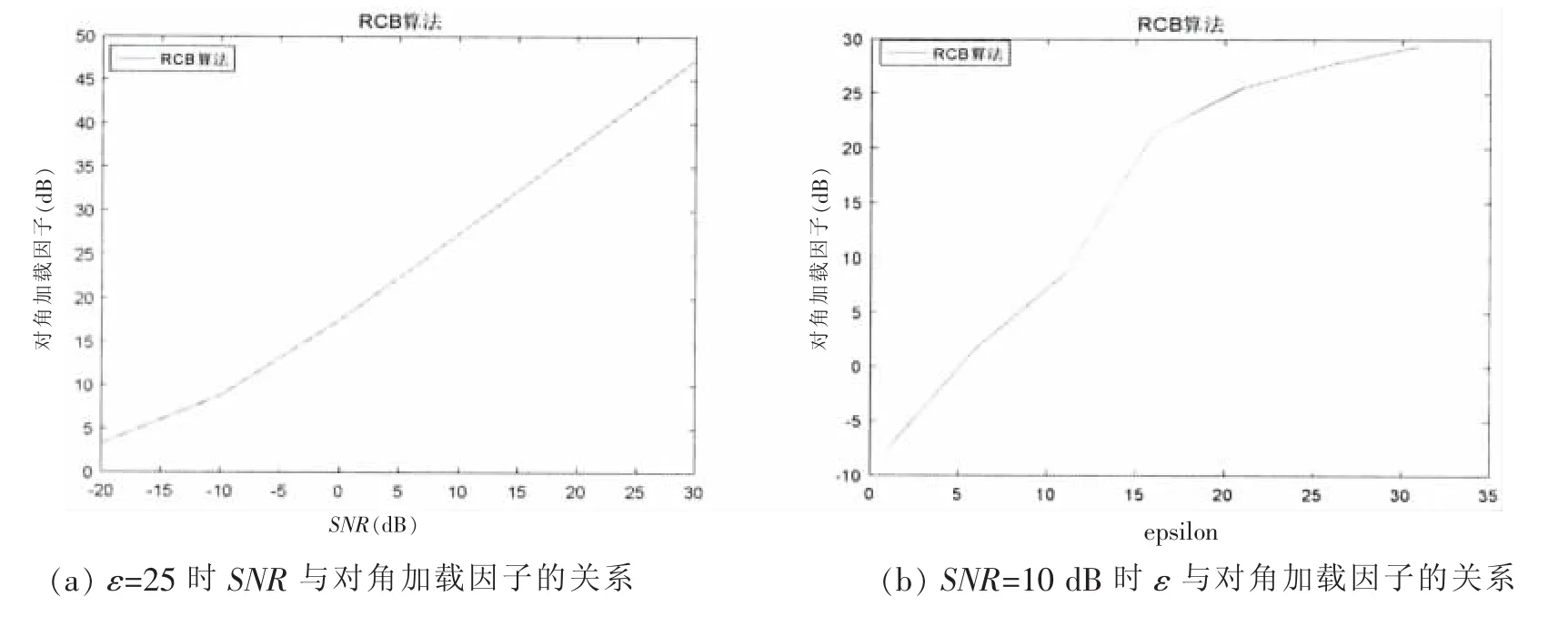
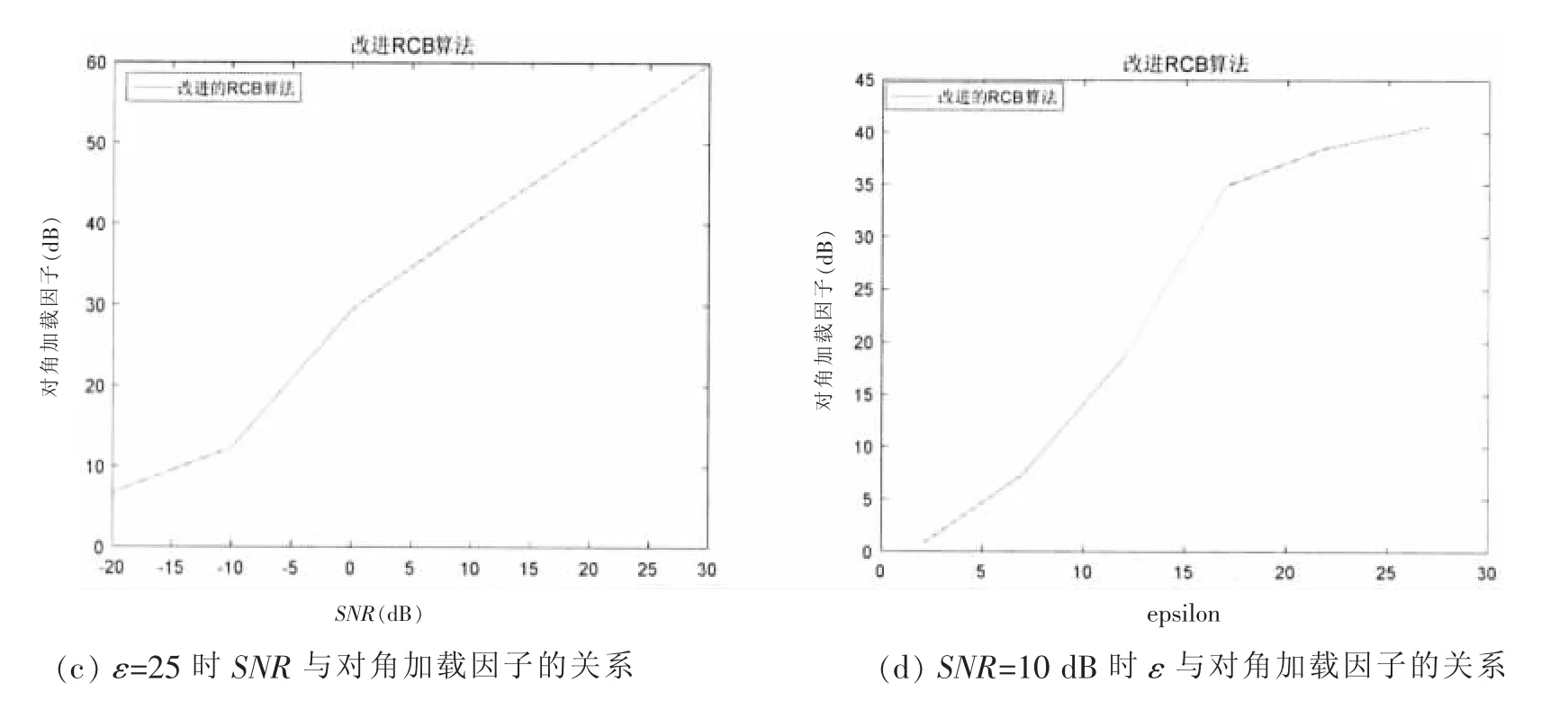
图2 输入角度偏差为1°时的对角加载因子Fig.2 Diagonal loading factor when input angle deviation is 1 degrees
4.2 分析波束指向存在误差情况下的波束图
假设期望信号功率为SNR=10 dB,来自5°方向,采样快拍数为N=20,改进的RCB算法中取ε=25。由图3可知,因为常规波束形成的加权向量为w_cbf=aθ0()/N,与协方差矩阵无关,所以常规波束形成的波束图有较好的结果,但是对矢量MVDR算法,因为快拍数N小于采样数,协方差矩阵不满秩,所以MVDR算法性能下降。由波束图结果可知,本文提出的改进的RCB算法适用于欠采样的情况。
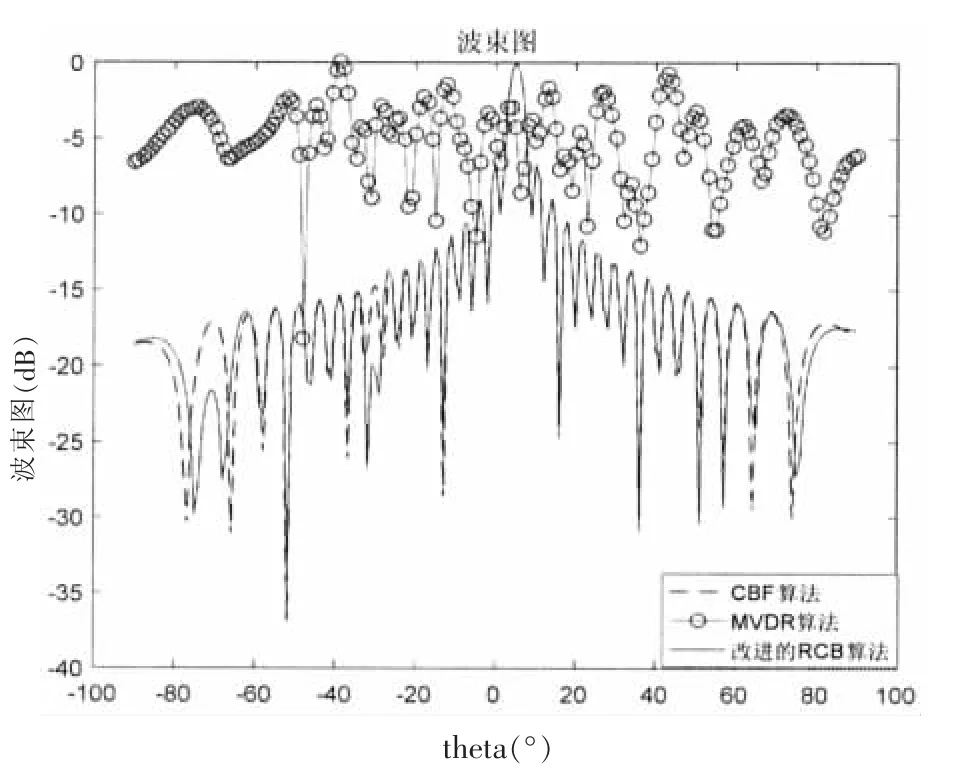
图3 波束指向误差为1°时的波束图Fig.3 Beam pattern,when the input angle deviation=1°
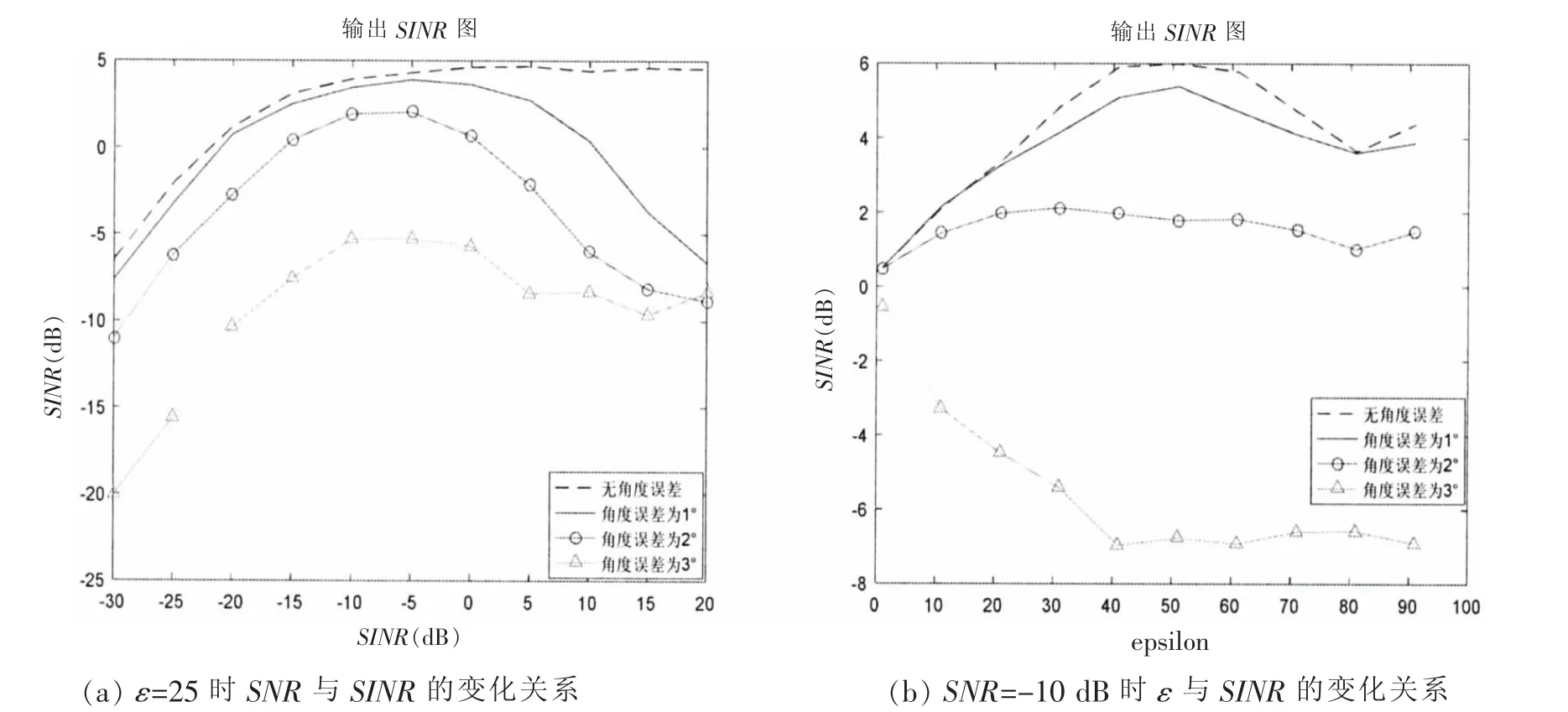
图4 指向误差变化时的输出SINR变化关系图Fig.4 Output SINR diagram,with the change of pointing error
4.3 分析改进RCB算法输出信干噪比SINR变化
假设期望信号输入信噪比SNR在-20 dB到30 dB之间变化,期望信号来自5°方向,采样快拍数为N=20,改进的RCB算法中取ε=25。而实际波束形成方向分别为5°到8°,即存在0°到3°的指向误差。由图4(a)可知,在指向误差在2°以内时,当SNR<5 dB时,算法输出信干噪比SINR之间误差较小,都在3dB以内,但当SNR>5dB时,在波束形成方向存在误差的情况下,输出信干噪比性能下降。此外,在指向误差为3°时,输出信干噪比性能与其他相差较大,说明波束形成方向误差较大的情况下,改进RCB算法性能也下降。由图3(b)可知,当角度误差在2°以内时,20≤ε≤70时,输出SINR性能最优,ε较小或者较大时,改进RCB算法性能下降;角度误差为3°时,输出SINR性能一直较差。
4.4 期望信号功率估计
假设期望信号来自5°方向,而实际的波束形成方向为6°,即存在1°的指向误差,采样快拍数为N=70。图5为不同输入SNR和不同ε下的期望信号功率估计。由图5(a)可知,在SNR>-15 dB时,期望信号功率估计值基本上与理想值误差在2 dB以内,改进的RCB算法具有较高的估计精度。由图5(b)可知,当15≤ε≤30之间时,估计值与理想值误差在2 dB以内,估计精度较好,ε较小时,改进RCB算法估计值与实际值直接存在较大误差,估计精度下降。

图5 指向误差为1°时期望信号功率估计Fig.5 Estimation of signal power at pointing error of 1 degrees
4.5 空间谱分析
当期望信号为窄带信号时,假设阵列为32元均匀间隔的矢量水听器,阵元间距为d=0.75 m,加入0-0.15 m的随机误差,设频率为f=1 000 Hz,采样率fs=8 192 Hz,信噪比SNR=10 dB,快拍数N=20,入射方向为5°,误差限为ε=25。空间谱估计的结果如图6(a)所示。由图6(a)可知,CBF算法主瓣宽,且起伏严重。而改进的RCB算法具有较尖锐的谱峰宽度及较好的抑制干扰的能力,有效提高了算法的稳健性。
当期望信号为宽带信号时,假设阵列为32元均匀间隔的矢量水听器,阵元间距为d=0.75 m,加入0-0.15 m的随机误差,所用的积分时间为T=10 s。设信号频率为f=900-1 100 Hz,采样率fs=8 192 Hz,信噪比SNR=10 dB,入射方向为-30°,误差限为ε=25。空间谱估计结果如图6(b)所示,结果与窄带结果相似。
4.6 海试结果分析
为了验证改进RCB算法的实际处理效果,进行了海试试验。海试时,所用矢量阵为32元均匀间隔柔性阵,每个水听器都是二维矢量水听器。试验船为专用测量船。试验时,测量船固定,并关闭主机,采集系统使用的是无噪声供电,目标为三艘水面船只,试验中,水听器布阵为水平布放。因为在试验过程中,无法对阵型进行校准,所以假设水听器阵在同一平面上,波束形成的处理频段为900-1 200 Hz,所用的积分时间为T=10 s。
试验处理结果如图7所示,其中横轴表示方位,纵轴表示时间。图7(a)为常规波束形成的方位估计时间历程图,图7(b)为MVDR波束形成的方位估计时间历程图,图7(c)为改进RCB算法的方位估计时间历程图。由图7可知,CBF算法、MVDR算法以及改进RCB算法的方位估计结果一致,与试验情况吻合得比较好,且可以看出改进RCB算法的效果要好于CBF算法和MVDR算法。
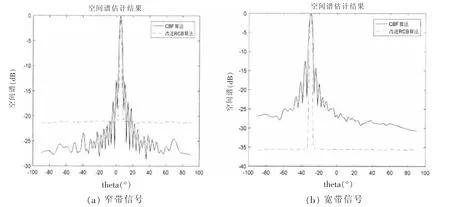
图6 空间谱估计结果Fig.6 Spatial spectrum estimation results
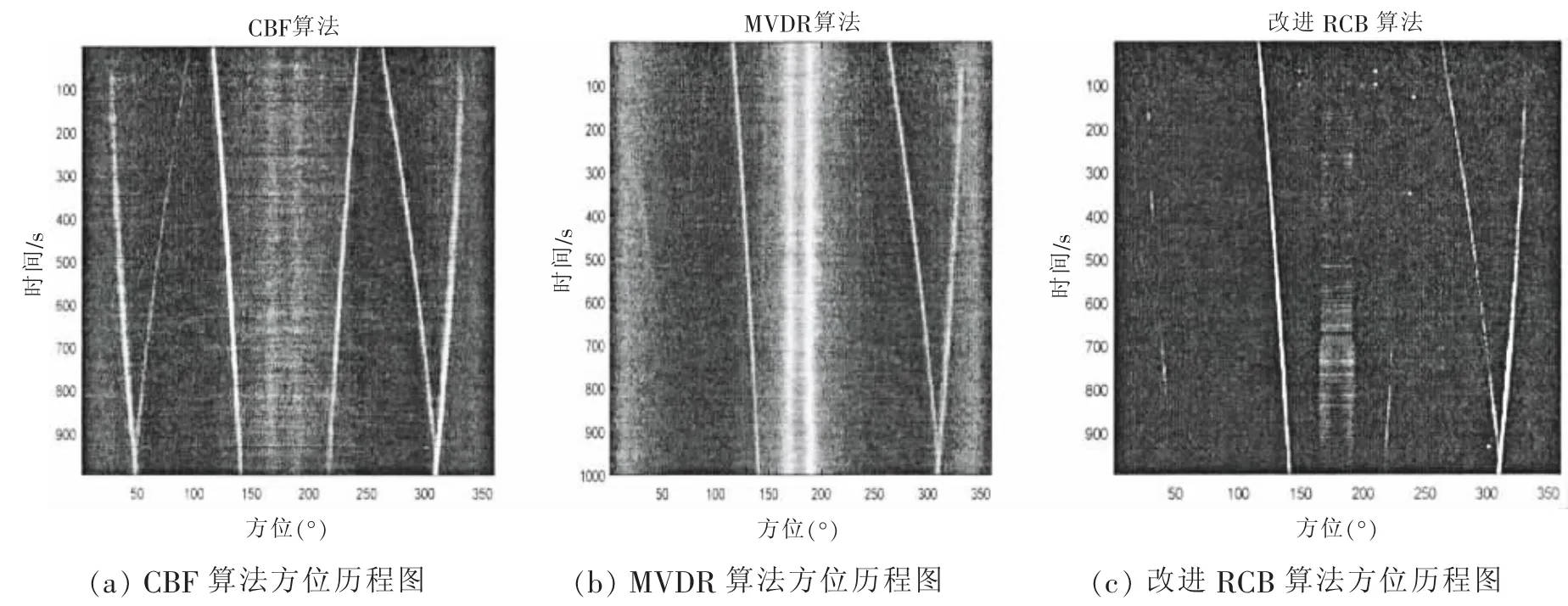
图7 方位估计时间历程图Fig.7 Time history of azimuth estimation
5 结 论
针对目标快速移动情况下,观测时间减少,快拍数不足引起的RCB算法性能下降的问题,提出了改进的RCB算法。改进的RCB算法直接对接收数据矩阵进行奇异值分解,此过程避免了求取协方差矩阵,且在奇异值分解时只需要求出左奇异矢量,减少了计算量,然后对RCB算法进行修正,最后得到改进的RCB的功率估计。改进的RCB算法的计算量大于MVDR和CBF算法,但在快速运动目标的情况下改进RCB算法检测性能优于这两种算法。仿真和海试结果表明:改进RCB算法提高了目标分辨率和估计精度,可以满足目标快速移动情况下,快拍数不足引起的欠采样问题。
[1]Fabrizio G,Colone F,Lombardo P,Farina A.Adaptive beamforming for high-frequency over the horizon passive radar[J].IET Radar Sonar Navigation,2009,3(4):384-405.
[2]Liu Gang,Sun Hui,Jin Dawei.Experimental research of vector hydrophone MVDR algorithm[J].Journal of Information and Computational Science,2015,12(4):1329-1336.
[3]翟昌宇,袁红刚.基于波束形成的OFDM水声通信技术[J].声学技术,2015,34(4):70-73.Zhai Changyu,Yuan Honggang.OFDM underwater acoustic communication technology based on beamforming[J].Technical Acoustics,2015,34(4):70-73.
[4]庞 宇,刘志伟,林嘉宇.基于波束形成器输出比的自适应语音分离方法[J].微处理机,2016,37(02):37-40.Pang Yu,Liu Zhiwei,Lin Jiayu.Automatic adaptive speech seperation method based on beamformer output ratio[J].Microprocessors,2016,37(02):37-40.
[5]许 光,周胜增.MVDR自适应波束形成技术在水声中的研究进展[J].声学技术,2014,33(6):554-558.Xu Guang,Zhou Shengzeng.Research progress of MVDR adaptive beamforming technology in underwater acoustics[J].Technical Acoustics,2014,33(6):554-558.
[6]李洪涛,陈 诚,曾文浩,朱晓华.基于导向矢量估计的鲁棒自适应波束形成算法[J].电波科学学报,2015,31(1):188-193.Li Hongtao,Chen Cheng,Zeng Wenhao,Zhu Xiaohua.Robust adaptive beamforming algorithm based on steering vector estimation[J].The Chinese Journal of Radio Science,2015,31(1):188-193.
[7]Li J,Stoica P,Wang Z Z.On robust Capon beamforming and diagonal loading[J].IEEE Trans.Signal Processing,2003,51(7):1702-1715.
[8]戴凌燕,王永良,李荣峰,等.基于不确定集的稳健Capon波束形成算法性能分析[J].电子与信息学报,2009,31(12):2931-2936.Dai Lingyan,Wang Yongliang,Li Rongfeng,Bao Zheng.Performance analysis of robust capon beamforming based on uncertainty set[J].Journal of Electronics&Information Technology,2009,31(12):2931-2936.
[9]Nai SE,Ser W,Yu Z L,Chen H.Iterative robsut mnimum variance beamforming[J].IEEE Transactions on Signal Processing,2011,59(4):1601-1611.
[10]孙贵情,张春华,黄海宁,李启虎.声矢量传感器线阵的左右舷分辨[J].哈尔滨工程大学学报,2010,31(7):848-885.Sun Guiqing,Zhang Chunhua,Huang Hai ning,Li Qihu.Left-right resolution of acoustic vector sensor line arrays[J].Journal of Harbin Engineering University,2010,31(7):848-885.
