冰载荷电力推进轴系扭转振动研究
2018-06-05肖能齐周瑞平侯之超
肖能齐 , 周瑞平 , 徐 翔 , 侯之超
(1.水电机械设备设计与维护湖北省重点实验室(三峡大学),湖北 宜昌 443002;2.汽车安全与能国家重点实验室(清华大学),北京 100084;3.武汉理工大学 能源与动力工程学院,武汉 430063)
0 引 言
为争夺北极地区渔业资源和矿产资源,现今各国已经开始设计和制造冰区航行的科学考察船和钻井船等[1-2];同时,为缩短货物的航程、降低航运成本从而提高竞争力,航运界开始运用冰区货船、冰区油船和破冰LNG船舶[3]等航行于北极航道中,目前柴电混合动力推进系统和纯电力推进系统被广泛用于冰区航行船舶中。为了冰区航行船舶电力推进轴系的安全性,各国船级社对冰区航行船舶轴系扭转振动提出了相应的要求。
目前国内外学者从冰载荷下的螺旋桨激励力[4]、电机振动激励力和冰载荷下的轴系扭转振动算法等三个方面进行了一定的研究。例如,Dan和Bose等[5]以加拿大海岸警卫队破冰船的螺旋桨为对象建立螺旋桨模型,借助理论计算与实验测试手段研究了螺旋桨与冰块相互作用过程中螺旋桨的水动力特性以及冰块对螺旋桨推力和转矩的变化。胡志宽[6]提出利用ANSYS软件对所建立的螺旋桨进行了冰载荷作用下的静力分析;最后,借助冰块与桨叶的碰撞模型,分别进行了单个冰块、两个冰块和三个冰块与螺旋桨桨叶的碰撞分析。Barro[7]提出冰块作用在螺旋桨上负载与冰的强度指数、原动机的类型以及推进系统刚柔特性有关;同时考虑冰载荷下的螺旋桨激励力,对冰区柴油机推进轴系扭转振动为例进行了理论计算与测试分析。江攀[8]对电机电磁振动和螺旋桨的激励力进行了研究,利用ANSYS软件在考虑激励力作用下对电力推进轴系进行了纵向振动和横向振动分析。肖能齐等[9]通过建立电机的机电耦合振动模型,分析了电机在起动过程中的扭转振动特性;同时以1000吨润滑油船舶电力推进轴系为研究对象,在不考虑电磁励磁转矩和考虑电磁激振力矩2种情况下,进行了强迫振动特性对比分析分析。杨红军等[10]阐述了冰区航行的柴油机推进轴系螺旋桨与冰块相互作用的螺旋桨激励力,使用Newmark法对轴系进行扭转振动计算,其瞬态计算结果与传递矩阵法计算结果和扭转振动测试结果一致。
本文以冰载荷混合动力推进系统的PTI推进模式为研究对象,首先对冰载荷与螺旋桨相互作用过程进行分析,从而对冰载荷激励力矩的时域和频域特性进行研究;其次研究推进电机气隙分布不均匀导致的电磁转矩波动而产生的阶次振动激励力;最后运用系统矩阵法对仅考虑电机的阶次激励力和冰载荷激励力与电机阶次激励力共同作用二种情况对轴系的扭转振动特性展开研究,并采用应变法进行实船测试与分析,验证相关理论和算法的正确性。
1 冰载荷作用下的螺旋桨激励力
1.1 螺旋桨与冰块相互作用过程
船舶推进轴系在冰区航行时,桨叶与冰块间将产生接触负荷,称为螺旋桨与冰块间的相互作用,图1所示为冰区航行中的电力推进轴系示意图。螺旋桨与冰块间的相互作用过程可以分为三个阶段:(1)冰块与桨叶接触-加载:该阶段叶片与冰块接触,水与冰块之间的相对运动将增加,同时载荷也增加;(2)桨叶穿透:随着载荷的增加达到一定值时,冰块破碎后叶片将穿透冰块破碎区;(3)冰块与桨叶分离:叶片与冰块逐渐分离,载荷逐渐减小直至桨叶与冰块之间分离,此时螺旋桨与冰块之间的相互作用负荷为零。螺旋桨与冰块间的相互作用如图2所示。
根据如图2所示冰区航行船舶的螺旋桨桨叶与冰块的相互作用过程,将螺旋桨单个叶片对冰块产生的扭矩激励分为3个工况,建立单个叶片与冰块冲击产生的扭矩激励力函数:
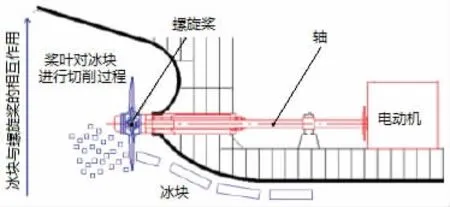
图1 冰区航行船舶电力推进轴系示意图Fig.1 Ice ships electric propulsion shafting diagram
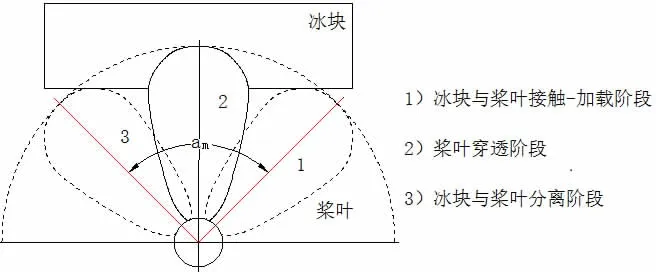
图2 螺旋桨桨叶与冰块的相互作用过程Fig.2 Interaction of the propeller blades and ice

其中:Qmax为螺旋桨与冰相互作用在螺旋桨上产生的最大冰块扭矩;θ为螺旋桨旋转角度;Cq和am与螺旋桨和冰块相互作用的扭矩激励工况有关,如表1所示。表中冰区加强船舶Cq和am的取值中,Z为螺旋桨的叶片数。

表1 冰区加强船舶Cq和am的取值Tab.1 Ice strengthened vessel Cq and am
1.2 冰载荷激励力
以5叶螺旋桨为例,在叶片1至叶片5将依次铣削冰块过程中,根据叶片与冰块冲击产生的扭矩激励力函数(1)式和(2)式,可以得到如图3所示的工况1-单叶片与冰块冲击产生的扭矩激励力曲线。
根据图3所示的扭矩激励力变化曲线可知:由于5叶螺旋桨相邻桨叶夹角为72°,叶片与冰块从进入冰块与桨叶接触-加载阶段到叶片与冰块逐渐分离的角度是72°,因此叶片1-5依次铣削冰块,曲线不存在重叠区域。
同理可以得到如图4所示的工况2-单叶片与冰块冲击产生的扭矩激励力的变化曲线。
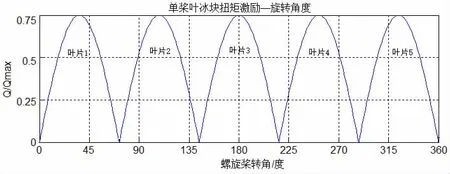
图3 工况1-单叶片与冰块冲击产生的扭矩激励力变化Fig.3 Case 1-change of torque excitation force produced by single blade and ice cube
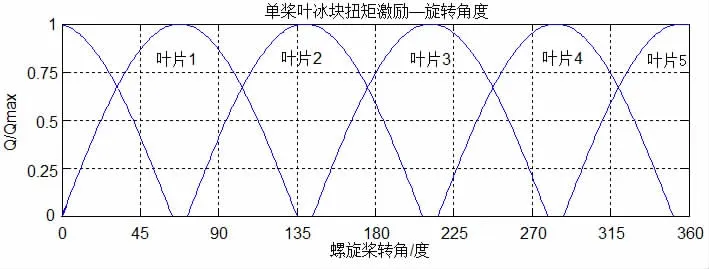
图4 工况2-单叶片与冰块冲击产生的扭矩激励力变化Fig.4 Case 2-change of torque excitation force produced by single blade and ice cube
根据图4所示的曲线图可知:螺旋桨相邻桨叶夹角为72°,而叶片与冰块从进入冰块与桨叶接触-加载阶段到叶片与冰块分离的角度是135°,曲线重叠区域是由于叶片与冰块之间未分离时,而相邻叶片已经开始切削冰块。
同理可以得到如图5所示的工况3-单叶片与冰块冲击产生的扭矩激励力的变化曲线。
根据图5所示曲线图可知:由于两个冰块相位差36°,而螺旋桨相邻桨叶夹角为72°,因此在0°到36°和在36°到72°范围内叶片1分别铣削第1个冰块和第2个冰块,其扭矩激励力曲线分别为图中的蓝色实线和红色虚线。

图5 工况3-叶片与冰块冲击产生的扭矩激励力变化Fig.5 Case 3-change of torque excitation force produced by single blade and ice cube
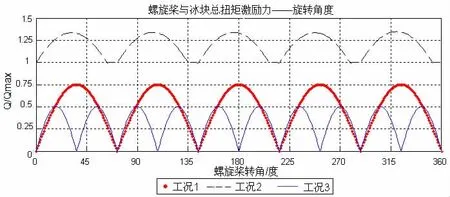
图6 工况1-工况3螺旋桨与冰块冲击产生的总扭矩激励力与旋转角的关系Fig.6 The relationship between the total torque excitation force and the rotation angle of the propeller and the ice cube in case1 to 3
为了得到桨叶与冰块相互作用的总扭矩激励力,将图3-5所示的工况1-工况3中的螺旋桨各桨叶的扭矩激励力进行叠加后可以得到如图9所示的在工况1-工况3下螺旋桨与冰块冲击产生的总扭矩激励力与旋转角的关系。
将其进行FFT变换,对螺旋桨与冰块相互作用产生的总扭矩激励力进行简谐分析,可以得到如图7-9所示的工况1-3的前32谐次的螺旋桨冰载荷总扭矩激励力幅值。
根据图7-9所示的螺旋桨冰载荷总扭矩激励力幅值分析可知:对于工况1和工况2的冰载荷下总扭矩激励力主谐次为5谐次、10谐次和15谐次;而工况3中冰载荷下的总扭矩激励力主谐次为10谐次、20谐次和30谐次。
2 电机振动阶次特性分析
电机在生产制造过程中存在加工误差,使得电机磁场必然是非正弦分布。为研究电机的阶次振动机理以及获得电磁转矩的解析计算公式,建立电机A、B、C相电机物理模型,如图10所示。
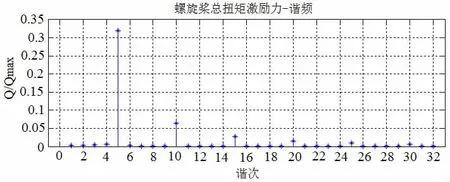
图7 工况1中1-32谐次的螺旋桨冰载荷总扭矩激励力幅值Fig.7 The total torque excitation force amplitude of the propeller ice load of 1-32 harmonic times in case 1
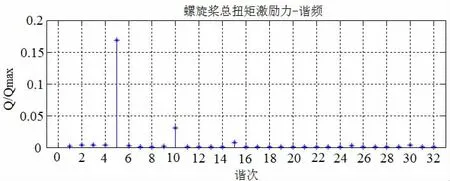
图8 工况2中1-32谐次的螺旋桨冰载荷总扭矩激励力幅值Fig.8 The total torque excitation force amplitude of the propeller ice load of 1-32 harmonic times in case 2

图9 工况2中1-32谐次的螺旋桨冰载荷总扭矩激励力幅值Fig.9 The total torque excitation force amplitude of the propeller ice load of 1-32 harmonic times in case 3

图10 电机物理模型Fig.10 The physical model of the electric machine
在ABC坐标系下,根据A相、B相和C相磁链之间的相关关系,可以建立如下所示的三相磁链矩阵表达式:
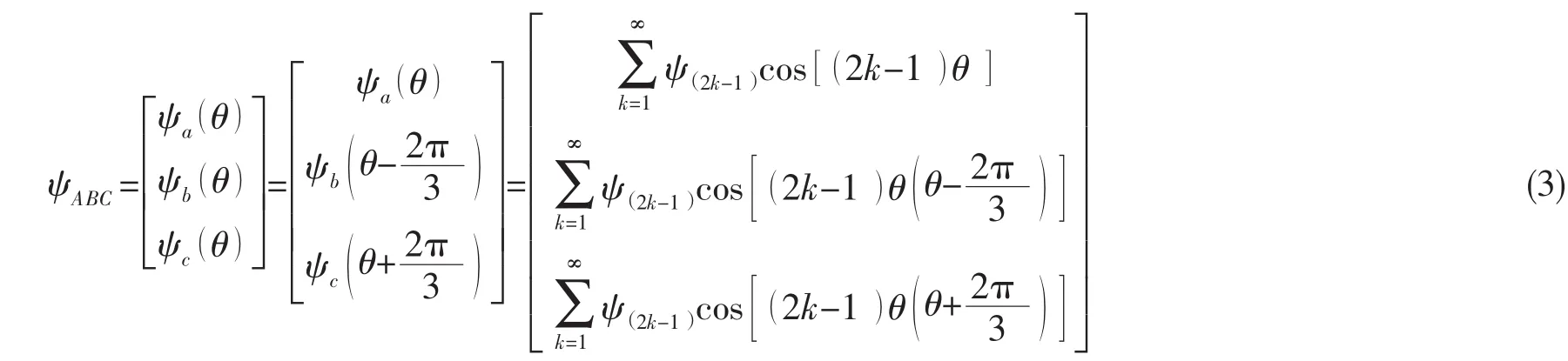

其中:τm和τ1为磁场分布系数;θ为主磁极与A相之间的夹角;B1和Br为磁密度;为气隙磁通密度(2i- 1 )阶谐波幅值。
根据)和磁通密度)计算公式(4)进行联合求解,可以得到 ψa(θ)
其中:rs为定子外圆半径;ls为定子轴向长度;

将ABC坐标系下的三相磁链矩阵表达式(3)经过坐标变换,可以得到在dqo坐标系下的磁链方程:
若不考虑绕组中的时间谐波电流,则在dqo坐标系下三相对称定子绕组中由基波正弦电流所产生的磁链为:

其中:Ld、Lq、Lo分 别为 d、q、o 轴定子电感;id、iq、io分别为 d、q、o 轴电流。
根据dqo坐标系下的磁链方程(7)式和基波正弦电流所产生的磁链(8)式,可以得到总磁链为:
在dqo坐标系下对总磁链式(9)进行求导,可以得到感应电动势为:
其中:ωr为转子电角速度。
根据电机的原理,电磁转矩为:

将(10)式和(11)式进行联立求解,电磁转矩的解析式解为:
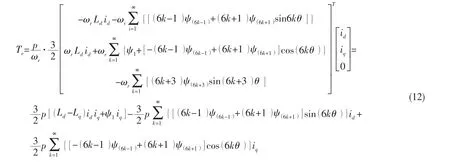
上述电磁转矩的解析式(12)中的第一项转矩是电机在理想状态下的电磁转矩;但是第二项转矩和第三项转矩在均由磁场谐波引起的6k阶转矩。因此在冰载荷电力推进轴系进行扭转振动计算过程中,在电机质量点处需要考虑由场谐波引起的6k阶转矩。
3 电力推进轴系计算与测试
3.1 电力推进轴系实例计算
本文以双机单桨混合动力系统的PTI模式推进轴系为研究对象,分析冰块-螺旋桨相互作用激励力与电机电磁激励力对推进轴系扭转振动的影响,如图11所示为电力推进模式示意图。在PTI模式下,减速齿轮箱离合器H和J脱开而离合器J合排,1#大柴油机和2#小柴油机均不工作,电机经过齿轮箱驱动船舶运行。采用集总参数对电力推进轴系的部件进行分块建模,再将各部件扭转振动数学模型进行组装,可得如图12所示的电力推进轴系扭转振动模型和表2所示的系统当量参数。
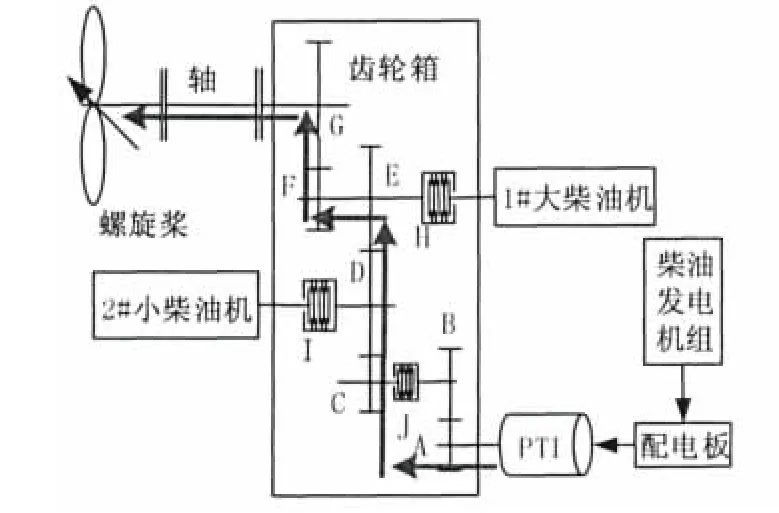
图11 电力推进模式示意图Fig.11 Schematic diagram of electric propulsion model
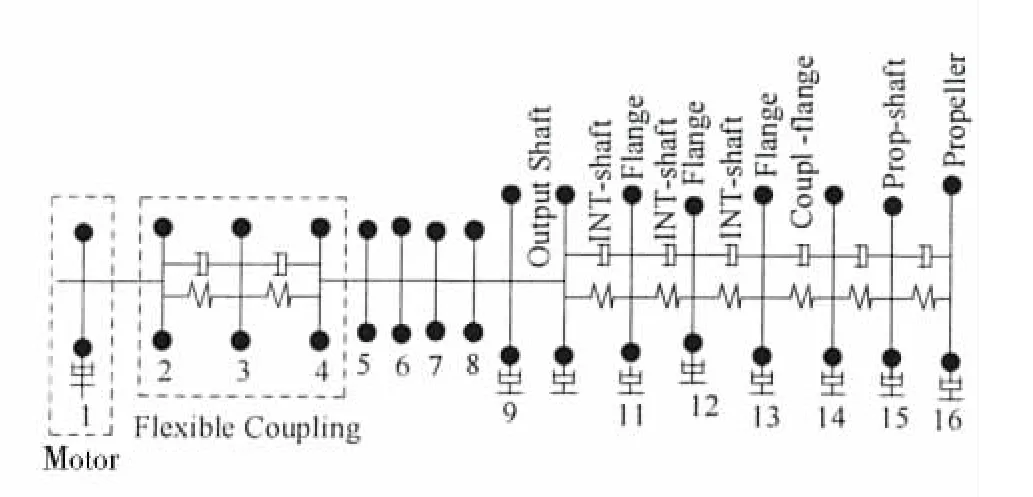
图12 电力推进轴系扭转振动模型Fig.12 Torsional vibration model of electric propulsion shafting
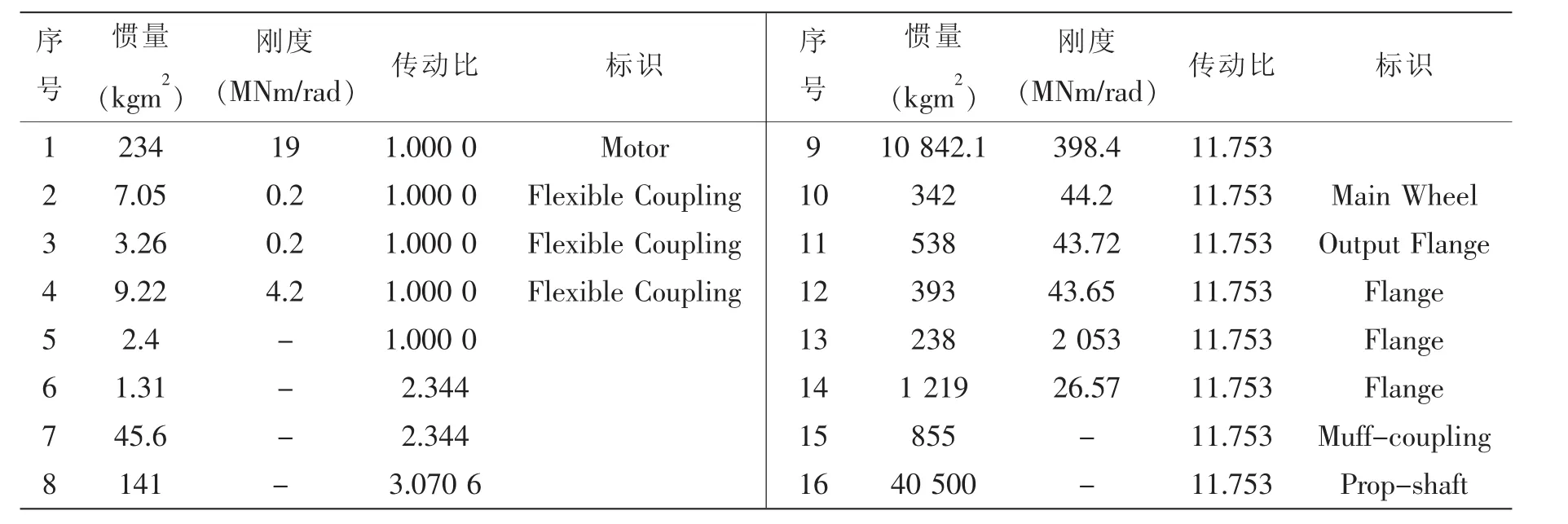
表2 电力推进轴系扭转振动当量参数Tab.2 Equivalent parameters of torsional vibration of electric propulsion shafting
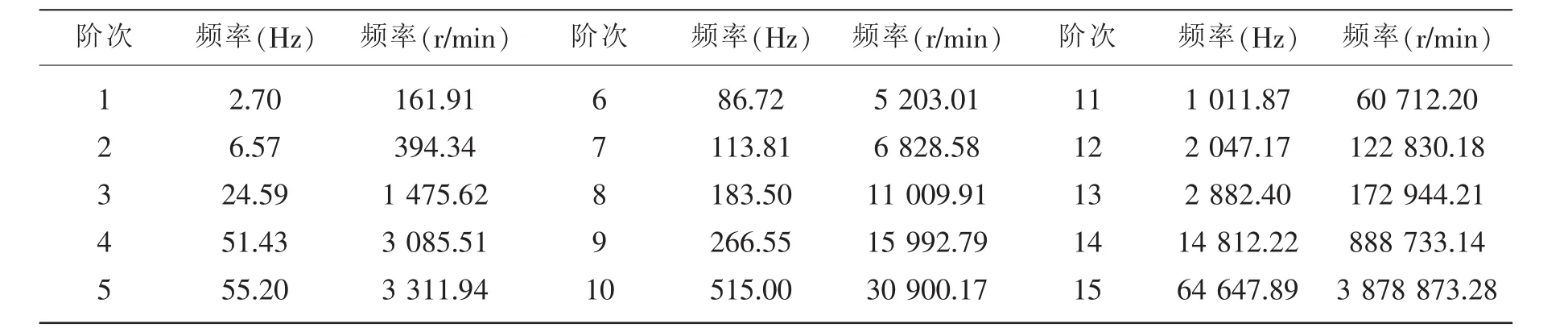
表3 电力模式的轴系自由振动固有频率Tab.3 Natural frequency of free vibration of shaft system in power mode
采用系统矩阵法以及利用MATLAB软件进行编程,从而可以得到无阻尼自由振动系统固有频率值,如表3所示电力推进模式的轴系自由振动固有频率。
如果船舶推进轴系的某谐次激励力矩的变化频率N等于轴系的某阶自振频率Nn时,即产生第ν谐次共振;同时电磁谐波的影响将产生6k谐次电磁激励力矩,因此可以得到电机各谐次激励力矩的临界转速nc,各参数之间的相互关系见公式(13)所示。由于篇幅原因仅列出前9阶次固有频率下各谐次的临界转速,如表4所示。


表4 1-9阶次固有频率下各谐次的临界转速Tab.4 Critical speed of the harmonic times of 1-9 order natural frequency
采用系统矩阵法对图15的轴系扭转振动数学模型进行强迫振动计算,本文仅考虑电机的阶次激励力和冰载荷激励力与电机阶次激励力共同作用二种情况进行理论计算,其计算结果如图13-16所示。
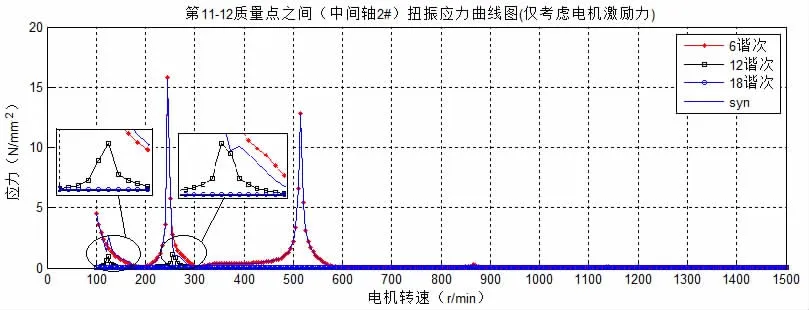
图13 第11-12质量点间(中间轴2#)扭振应力曲线图(仅考虑电机激励力)Fig.13 Torsional vibration stress curves between 11st and 12nd mass points(considering only the motor excitation force)
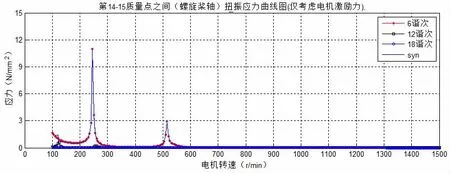
图14 第14-15质量点间(螺旋桨轴)扭振应力曲线图(仅考虑电机激励力)Fig.14 Torsional vibration stress curves between 14th and 15th mass points(considering only the motor excitation force)
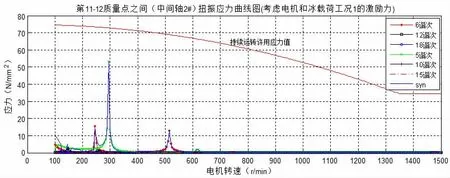
图15 第11-12质量点(中间轴2#)应力曲线图(考虑电机和冰载荷工况1激励力)Fig.15 Torsional vibration stress curves between 11st and 12nd mass points(considering the load of motor and ice load in case 1)
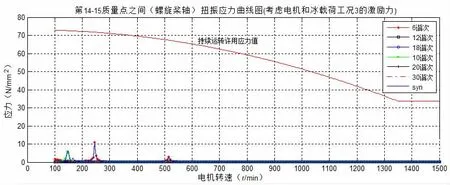
图16 第14-15质量点(螺旋桨轴)应力曲线图(考虑电机和冰载荷工况3激励力)Fig.16 Torsional vibration stress curves between 14th and 15th mass points(considering the load of motor and ice load in case3)
根据图13-16所示的电力推进轴系强迫振动计算结果可知:
(1)在电机的阶次激励力作用下,对轴系扭转振动影响最大的前三谐次分别为6谐次、12谐次和18谐次。
(2)在电机6谐次激励力下,电力推进轴系扭转振动在speed=245 r/min和speed=514 r/min处共振较为明显,与表4所示的前9阶固有频率下各谐次的临界转速进行比较,分别对应自由振动的3阶6谐次、4阶6谐次和6阶6谐次。
(3)电机6谐次激励力下,电力推进轴系扭转振动在speed=122 r/min和speed=257 r/min处共振较为明显,与表4所示的前9阶固有频率下各谐次的临界转速进行比较,分别对应自由振动的3阶12谐次和4阶12谐次。
(4)冰载荷激励力对轴系扭转振动的影响比电机阶次激励力对轴系扭转振动影响更大;冰载荷工况1对轴系应力影响最大,冰载荷工况3对轴系应力影响最小,与本文1.2节中所分析的冰载荷激励力理论一致。
(5)在冰载荷工况1作用下,冰载荷激励力的主谐次5谐次、10谐次和15谐次;而在冰载荷工况3的激励力作用下,冰载荷激励力的主谐次10谐次、20谐次和30谐次,与本文1.2节中所分析的冰载荷激励力理论一致。
3.2 电力推进轴系测试
为了验证电力推进轴系扭转振动计算结果的正确性,采用应变法进行轴系振动测试,其测点分别如图17所示的测点布置示意图和图18所示的在实船中测试仪器布置图。测试系统的主要由粘贴在中间轴处的应变片、无线接收装置、无线应变采集节点以及上位机分析系统。
本次测试过程中上位机分析软件是DHDAS动态信号采集分析系统,如图19所示。应变法轴系扭转振动的测试原理:
(1)轴系在运转过程中轴系产生的扭转振动使得轴系产生微小变形,粘贴在轴系表面上的应变片发生与之等量的变形,并通过自身电阻值的变化将轴系的形变表现出来;
(2)通过惠斯通电桥将应变片电阻值的变化转化为电压信号输出,无线动态应变采集节点通过检测电桥输出电压信号的变化,获取应变片电阻值的变化量,从而得到轴系在运转过程中所产生的轴系应变值;
(3)采用无线传输技术,将无线动态应变采集节点所采集的数据输出至计算机系统中,然后通过上位机分析软件进行数据处理与计算,从而得到轴系的实时振动应力值。
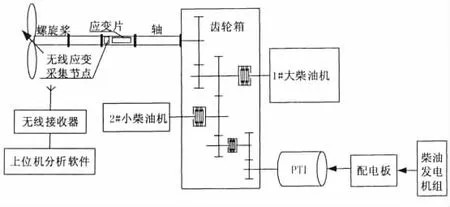
图17 测点布置示意图Fig.17 Schematic diagram of measuring point layout
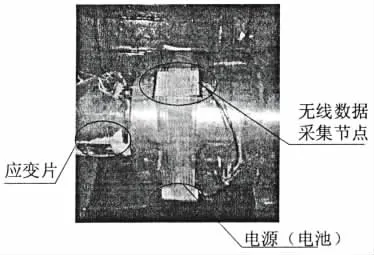
图18 在实船中测试仪器布置图Fig.18 Test instrument layout in a ship
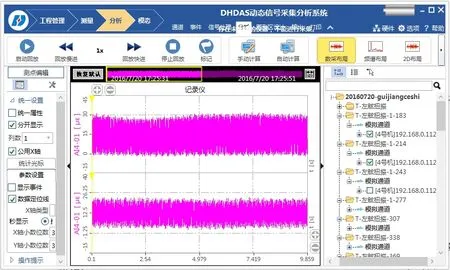
图19 DHDAS动态信号采集分析系统Fig.19 DHDASdynamic signal acquisition and analysis system
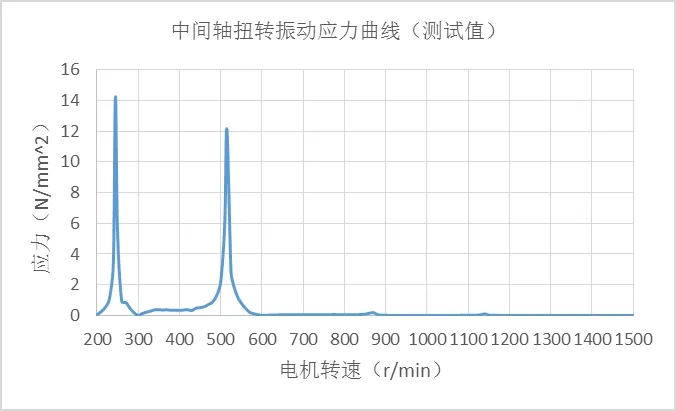
图20 中间轴扭转振动应力曲线测试值Fig.20 Test values of intermediate shaft torsional vibration stress curve
本次测试过程中对双机单桨混合动力系统的PTI模式推进轴系工况进行了测试,由于受条件约束未进行冰区航行,因此仅获得无冰载荷时轴系扭转测试数据。根据上述应变法测试的原理对测试数据进行处理后,可以得到如图20所示的中间轴扭转振动应力曲线测试值。
对图13所示的中间轴扭转振动应力理论计算值与图20所示的中间轴扭转振动应力测试值进行对比分析:
在3.1节中仅考虑电机阶次激励力的推进轴系强迫振动理论计算可知,中间轴2#在speed=245 r/min和speed=514 r/min处共振较为明显,其应力值分别为15.6 N/mm2和12.7 N/mm2;而与图20所示的中间轴2#在共振点处的应力值分别为14.2 N/mm2和12.1 N/mm2相比较,其误差分别为9.2%和4.7%,理论值与测试值基本一致。
4 结 论
(1)本文对螺旋桨桨叶与冰块的相互作用过程及激励力特性进行了研究,得到了桨叶与冰块相互作用产生的激励力时域曲线;同时对其进行频域分析时,对于5叶螺旋桨而言工况1和工况2中冰载荷下的总扭矩激励力主谐次为5谐次、10谐次和15谐次;而工况3中冰载荷下的总扭矩激励力主谐次为10谐次、20谐次和30谐次。
(2)对电机振动机理以及电机振动过程中阐述的阶次激励力进行了分析,提出了电机存在阶次振动以及通过阶次振动机理和公式推导给出电磁转矩的解析计算公式,为研究电力推进轴系的扭转振动特性奠定了理论基础。
(3)以混合动力推进轴系的电动机模式下的轴系为实例,在仅考虑电机阶次激励力作用和考虑电机阶次激励力与冰载荷激励力作用二种情况下,运用系统矩阵法对轴系的扭转振动特性进行分析,验证了冰载荷作用下的螺旋桨激励频域特性和电机阶次振动相关理论的正确性,具有十分重要的工程应用价值。
[1]Cho SR.The resistance of ice breaking ship using the regression analysis of model tests[J].Ocean Engineering,2015,108(2015):692-703.
[2]Kwon Y H,Lee T K,Choi K.A study on measurements of local ice pressure for ice breaking research vessel‘ARAON’at the Amundsen Sea[J].International Journal of Naval Architecture&Ocean Engineering,2015,7(3):490-499.
[3]王传荣.冰区LNG船未来发展方向[J].船舶物资与市场,2010(5):15-17.Wang Chuanrong.Ice LNGtanker development direction in the future[J].Marine Equipment/Materials&Marketing,2010(5):15-17.
[4]Tian Ximin,Zou Zaojian,Yu Jijun,Wang Fuhua.Review on advances in research of ice loads on ice-going ships[J].Journal of Ship Mechanics,2015,19(3):337-348.
[5]Dan W,Bose N,Yamaguchi H,et al.Hydrodynamic loads on ice-class propellers during propeller-ice interaction[J].Journal of Marine Science&Technology,1997,2(1):12-20.
[6]胡志宽.冰载荷下螺旋桨静力分析及冰与桨碰撞动力响应研究[D].哈尔滨:哈尔滨工业大学,2014.Hu Zhikuan.Static analysis of propeller under ice loads and dynamic response of the collision between ice and blade[D].Harbin:Harbin Institute of Technology,2014.
[7]Barro R D,Lee D C.Excitation response estimation of polar class vessel propulsion shafting system[J].Transactions of the Korean Society for Noise and Vibration Engineering,2011,21(12):1166-1176.
[8]江 攀.电力推进船舶轴系振动特性及其仿真研究[D].武汉:武汉理工大学,2011.Jiang pan.Research on shafting vibration and simulation electrical marine[D].Wuhan:Wuhan University of Technology,2011.
[9]肖能齐,周瑞平,林晞晨.冰区航行船舶电力推进轴系机电耦合的扭振分析[J].船舶工程,2015(4):45-48.Xiao Nengqi,Zhou Ruiping,Lin Xichen.Electromechanical coupling torsional vibration analysis of electrical propulsion in icy conditions[J].Ship Engineering,2015(4):45-48.
[10]杨红军,车驰东,张维竞,等.冰载荷冲击下的船舶推进轴系瞬态扭转振动响应分析[J].船舶力学,2015,19(1):176-181.Yang Hongjun,Che Chidong,Zhang Weijing,Qiu Ting.Transient torsional vibration analysis for ice impact of ship propulsion shaft[J].Journal of Ship Mechanics,2015,19(1):176-181.
