基于BLUE的双站纯方位跟踪算法*
2018-06-05赵温波
盛 琥,赵温波
(1 中国电子科技集团第38研究所,合肥 230031; 2 陆军炮兵防空兵学院,合肥 230037)
0 引言
随着多站同步问题的解决,多站无源定位与跟踪技术成为研究热点。纯方位定位系统由于不辐射信号,隐蔽性较好,受到学者关注。受站点布局和非线性等因素影响,多站纯方位系统定位精度不高,需要研究非线性滤波技术提高精度。现有的非线性滤波技术主要有扩展卡尔曼滤波(EKF)[1]、确定采样型滤波(UKF、CKF)[2-3]、随机采样型滤波(PF)[4]和量测转换等[5-7]。EKF方法简单高效,但估计误差较大。确定采样方法能逼近估计误差的二阶项或更高,但计算量比EKF高一个量级。PF对非线性非高斯问题有很强的解决能力,但计算复杂度高,其实用还需时日。量测转换将非线性量测转换到直角坐标系中,估计转换误差统计特性后,再用标准卡尔曼滤波器跟踪,其估计精度较高,且计算量不大,自提出以来得到一些应用。量测转换方法分为三类:嵌套量测转换[8],基于观测的量测转换[9]和线性最佳无偏估计[10-11](BLUE:Best Linear Unbiased Estimation)。BLUE滤波器在动态模型与目标运动模式匹配时,能实现最优估计。文中将以双站纯方位定位系统为对象,建立目标观测模型,分析量测转换误差统计特性,推导对应的BLUE滤波器。
1 双站纯方位系统的BLUE滤波模型
BLUE算法可以解决量测非线性问题(如雷达目标跟踪)。算法假设目标状态满足关系:
xk=Fk/k-1xk-1+wk
(1)
式中:xk是k时刻目标状态;观测噪声为wk~N(0,Qk);Fk/k-1是状态转移矩阵。

(2)
第二步估计预测误差统计特性。
(3)


(4)
第四步计算k时刻滤波增益因子Kk。
(5)
第五步状态估计。
(6)
第六步计算估计误差的协方差阵。
(7)
(8)
(9)
式(9)在真实值附近展开后保留二阶项,有转换量测zk的表达式为:
(10)
其中:
分析式(10)发现,将方位量测转换到直角坐标系后,其量测转换误差不再是无偏的,而是表现出有偏性,如式(11)所示:
(11)
(12)
[P(:,1)P(:,3)]
(13)
(14)
Sk中S11参数定义如下:
(15)
(16)
类似可推导出Sk中其它参数值。
(17)
(18)
2 仿真
为验证文中算法性能,将其与两种主流的非线性滤波方法——EKF和UKF比较。仿真场景如下:以测向站之间中点为坐标原点,两测向站坐标分别为(-15 km,0)、(15 km,0),测向精度3°。目标从(-20 km,24 km)出发,以(200 m/s,0)速度匀速运动,沿各轴加速度摄动0.01 m/s2。目标起始位置误差10 m,速度误差10 m/s,初始滤波协方差阵102I。采样周期1 s,仿真时长200 s,用UKF、EKF和BLUE分别跟踪,仿真次数500次,仿真结果如图2~图5所示。
由图2~图5可见,BLUE滤波器和UKF的跟踪性能相同,EKF的跟踪性能稍差;在滤波置信度比较上,BLUE和UKF都接近1,而EKF略大于1,即有轻微的滤波失配。究其原因,因为BLUE和UKF能够逼近估计误差的高阶项(如式(14)~式(18)所示),而EKF只对预测状态做一阶近似,因此性能略差。
仿真二中,其它条件不变,将各轴摄动加速度增至3 m/s2,仿真结果如图6~图9所示。
图6~图9中,由于过程噪声显著增大,EKF对误差高阶矩估计不足的弱点被掩盖,三种算法的跟踪精度和置信度相近。为全面评估性能,对算法计算效率做了比较,表1是跟踪场景中各算法的运行时间。
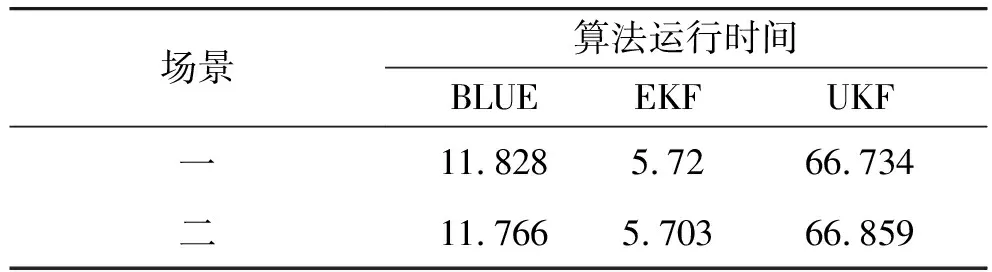
表1 算法运行时间对比 s
综合仿真结果,有以下结论:EKF计算负荷最小,但精度稍差,UKF跟踪精度较高,但计算量大。BLUE滤波器在计算量、跟踪精度和滤波置信度上的综合表现较好。
3 结语
量测转换在雷达中广泛使用,但在其它系统中尚未推广。文中研究双站纯方位系统中的BLUE滤波算法,并与经典非线性滤波方法比较。由于能估计出量测转换误差的高阶特性,算法在不同误差尺度下的性能较好,是一种稳健高效的方法。另外发现:所提BLUE滤波器在目标相对基站的布局变差时,跟踪性能会恶化甚至发散,下一步将针对该问题开展研究。
