助老伴行机器人的设计开发
2018-06-01,,2,,
,,2,,
(1.西安交通大学机械工程学院,陕西 西安 710049;2. 西安交通大学陕西省智能机器人重点实验室,陕西 西安 710049)
0 引言
随着很多国家迅速步入老龄化社会,越来越多的老年人下肢虚弱,但其对自力更生和独立活动有着强烈的愿望,另外,日益增长的老年人数量导致护理的年轻人员短缺,因此,特别需要开发助老伴行机器人来代替护士和家人照看老年人。世界上很多学者研究了各种老年人助行机器人,主要有Kong J S等人研制的Walking Aid[1],Yuk G H 等人研制的Smart Mobile Walker[2],Lee G 等人研究的JAIST Robotic Walker[3],Asker A 等人研制的老年人多功能移动性辅助设备[4],Moon M K 等人研究的老年人服务机器人[5],上海交通大学初步完成了智能助行机器人概念样机[6],先后研发了多种型号的WalkMate助行机器人[7],浙江大学研制了一种搀扶助行机器人系统ZJU Walker[8],实验室研究的第一代助老伴行服务机器人[9]。
现如今助老伴行机器人仍然处于不断发展中,少数发达国家已投入应用,而我国的助老伴行机器人尚未走出实验室,没有成熟的产品,同时助老伴行机器人的市场需求呈现逐年上升趋势,有着广泛应用前景。因此开发具有独立自主知识产权的助老伴行机器人具有深远意义。
自主开发设计了一台助老伴行机器人。通过分析老年人日常生活所面临的困境,确立了主体功能,以此为基础进行了总体设计;然后对整体结构尺寸以及各功能部件进行了详细设计;同时还对结构姿态变换控制系统和基于触觉力的人机交互控制系统进行了设计,基于触觉力的人机交互控制采用触觉感知驱动的双电机差速驱动控制方法,实现机器人的前进、后退、转弯等动作。最后,搭建了结构姿态变换和在线行走驱动系统两实验平台,验证机器人结构姿态变换控制系统满足设计要求以及基于触觉力的人机交互控制系统确实可行。
1 助老伴行机器人的功能需求分析
老年人多数具有强烈的自主活动愿望,希望能够在保证安全的前提下尽可能多的接触社会。所以该助老伴行机器人主要应具备以下几个方面的功能:
a.助力伴行功能。当老年人想外出行走时,切换到助力伴行姿态,利用水平扶手进行助力支撑,帮助老年人自主行走。
b.轮椅输送功能。当老年人活动疲惫后,可以切换到轮椅输送位姿,姿态降低,座椅自动滑出,为老年人进行代步输送。
c.辅助起、坐功能。大多数老年人由于腿部力量减退、平衡能力下降等因素,在由站立状态转换为坐立状态或者由坐立状态转换为站立状态时常常需要外部装置的助力或者依靠他人的搀扶,所以助老伴行机器人还应具备辅助起、坐的功能。
d.安全保障功能。老年人易摔伤的特点决定助老伴行机器人应具备防摔等安全保障功能。
2 助老伴行机器人的总体设计
依据助老伴行机器人的功能需求,从人机工程学的角度,考虑宜人化、安全性、轻便性等要求,对其进行了总体设计,如图1所示。主要由行走驱动部分、姿态变换机构、分体环绕式锁止防摔机构、座椅收展驱动机构等4个主要功能模块组成。

图1 助老伴行机器人的总体三维示意
采用双人字形主体结构,前后支腿间设置有直线推杆,实现轮椅输送、助力伴行两种姿态间的转换;采用双轮毂电机驱动,双轮差速转向控制,转向灵活;机器人前端左右对称的把手上安装有触觉力传感器,用于感知老年人的行走意图;把手内侧附近安装有控制按钮,包括电源开关、姿态转换开关、有级调速按钮等;还设置有座椅自动翻折机构,采用直流电机驱动;支撑扶手采用前后可分离可锁紧的环形结构;在前支腿底侧内部空间内设计了电源托架,用于安装蓄电池。
3 助老伴行机器人的机械本体设计
3.1 整机结构尺寸设计
考虑对不同身材老年人的兼容性以及环形扶手的内部应有足够的空间。助力伴行姿态扶手臂极限高度为1 150 mm,前后轮跨距650 mm,可以通过主推缸的调节作用将扶手高度调节到800 mm左右,基本可以实现对身高在150~180 cm的老年人实现助力伴行;轮椅输送姿态扶手臂处于最低位置为740 mm,座椅平面高度为500 mm左右,前后轮距1 230 mm。扶手内部空间为左右宽500 mm,前后距离640 mm,而一般老年人群身体宽度为300~450 mm,机器人内部空间充足。
3.2 姿态变换机构设计
为了使助力伴行和轮椅输送两种姿态间的切换自然、宜人,设计了双人字形支腿结构,如图2为机器人姿态变换机构模型图。该机构主要包括前支腿、后支腿、扶手臂、万向轮安装板、3组直线推杆。

图2 姿态变换机构模型
前后支腿一端通过铰链连接,另一端通过直线推杆连接,直线推杆的伸缩运动可以起到调节机器人整体高度的作用。在图示位置添加了直线推杆装置,通过调节扶手臂与前支腿之间的夹角来保证扶手臂轴线始终处于水平状态;为了保证万向轮在姿态变换前后转向的灵活性与可靠性,安装轴应始终保持在与地面垂直方向上,所以在后支腿的底部与万向轮安装板之间也设置了一对直线推杆装置。
3.3 分体式环绕锁止防摔机构设计
该助老伴行机器人借助左右对称的支撑扶手形成四周环绕的防护支撑结构,可以起到有效的助力支撑和摔倒防护的作用。图3为环形扶手支撑防摔机构图,包括扶手垫、扶手前臂、扶手后壁及扶手锁止机构4个部分。其中扶手锁止机构包含锁止销、回位弹簧、解锁键等零件。按动解锁键,通过杠杆原理将锁止销下压解开前后扶手臂之间的锁定;松开解锁键,锁止销在回位弹簧的作用下伸出并与扶手前臂相应位置的锁止销孔配合,将前后扶手臂锁定为一体。

图3 环形扶手支撑防摔机构
3.4 座椅收展机构设计
座椅收展机构采用电动收展座椅设计,利用电机-齿轮-齿条机构可以使座椅自动收起折叠和伸展,如图4。主要包括座椅支架、座椅、直流电机、传动系统等,其核心采用电机-齿轮-齿条结构的动力传输机构。图示两副座椅支架分别和所在一侧的人字形支腿、后备箱固定连接,直流电机通过电机支架固定在座椅内部。

图4 座椅收展机构
3.5 电源设计
为了满足续航要求、尽可能减小电源尺寸和满足结构的稳定安全性,选择QY-24V-80Ah锂电池。该电池输出电压24 V,蓄电量80 Ah,按照驱动轮选型功率240 W计算,续航时间可以达到8 h,续航里程25 km,续航能力充足。
4 助老伴行机器人的控制系统设计
4.1 机器人结构姿态切换控制系统设计
结构姿态切换控制系统如图5,主要包括24 V直流电源、2个自复位点动开关、1个开关电路、4个普通直流电机驱动器模块、3组电动推杆、1个用于驱动座椅的直流电机。
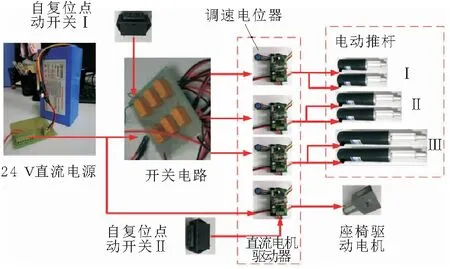
图5 机器人结构姿态切换控制系统
其中自复位电动开关是输入端,普通直流电机驱动器由两部分组成:一个是控制电机方向的驱动桥电路,方向控制信号由开关电路输出,另一个是调节电机速度的脉宽调制(PWM波)电路,其核心是12F615单片机;另外,3个直流电机驱动模块的方向控制信号输入端不能直接并联,如果直接并联将会导致电位器不能独立控制与该模块相连的该组电动推杆的速度,所以借助继电器的电气隔离功能设计相应的开关电路。
4.2 基于触觉力的人机交互控制系统设计
如图6为基于触觉力的人机交互控制系统图。主要包括24 V直流电源、±5 V电源模块、触觉力检测电路、Ardunio、无刷直流驱动器、轮毂电机。
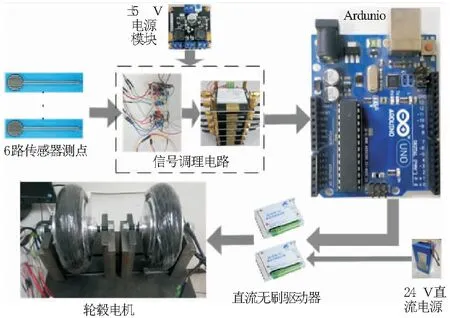
图6 基于触觉力的人机交互控制系统图
采用触觉感知驱动的双电机差速驱动控制方法,实现机器人的前进、后退、转弯等控制。依据两把手触觉力大小来判断对应侧轮毂电机正反转或停止转动,进而实现机器人前进、后退、转弯等动作。
5 样机搭建与性能测试分析
5.1 结构姿态变换实验验证
为了检验所设计的助老伴行机器人结构姿态变换的效果,搭建了机器人结构姿态变换实验平台。通过姿态调整开关完成助力伴行姿态和轮椅输送姿态之间的切换,同时,机器人在完成自身结构姿态变换时,还起到了辅助老年人站立的作用。
实验结果表明,该机器人可以流畅的在两种姿态间切换,电动座椅收展自如。机器人从一种姿态向另一种姿态连续切换所花费的时间为13 s,姿态变换控制系统满足设计要求。助力伴行姿态下的扶手臂极限高度为1 155 mm;轮椅输送状态下的扶手臂高740 mm,座椅高度为510 mm。通过姿态调整,该机器人可以适应身高在150 ~180 cm范围内的老年人。
5.2 在线行走驱动实验验证
为了检验所设计的基于触觉力的人机交互控制系统的有效性。搭建了在线行走驱动系统实验平台。 行走驱动系统的输入为人机触觉力信号,且6路触觉力信息需要先整合FL和FR两路数据。通过串口通信工具采集机器人8种运动状态下经Ardunio处理后的FL、FR两路数据信息,如图7。
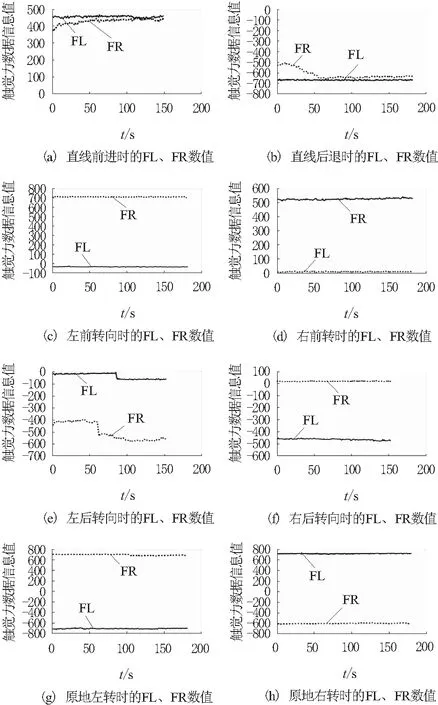
图7 助老伴行机器人8种运动状态下的FL、FR数值
从图7可以看出,由以上8种状态下左右触觉力FL、FR数据可以看出,将阈值τ设置在100到300之间既可以准确识别以上8种运动状态。综合考虑,在本系统软件中采用200作为阈值。即:当FL或FR的值大于200时,判断对应侧轮毂电机正转;当FL或FR的值小于-200时,判断对应侧轮毂电机反转;当FL或FR的值在200~-200之间时,判断对应侧轮毂电机停止转动。
将2种姿态下的速度进行区分,即助力伴行姿态下机器人运行速度较慢,而轮椅输送姿态下其运行速度较快。具体体现在Ardunio的输出指令信号PWM波上:在实验过程中,在助力伴行姿态下,不管电机是正转还是反转PWM波占空比均设定为30%;在轮椅输送姿态下,PWM波占空比设定为70%。,轮椅输送姿态下4种状态的PWM波形如图8所示,其他4种状态下的波形类似。
实验结果表明,使用者操纵的方向与实际机器人运行的方向基本吻合,实现前进、后退、左转、右转、停止五种基本状态及其它们的组合的有效判别,正确率达到96.1%,如表1所示。因此说明本文所设计的基于触觉力的人机交互控制系统切实可行;助行最大速度8 km/h,负载能力最大100 kg,360°零半径自由旋转,续航里程25 km。

图8 助老伴行机器人轮椅输送工况下的PWM波形
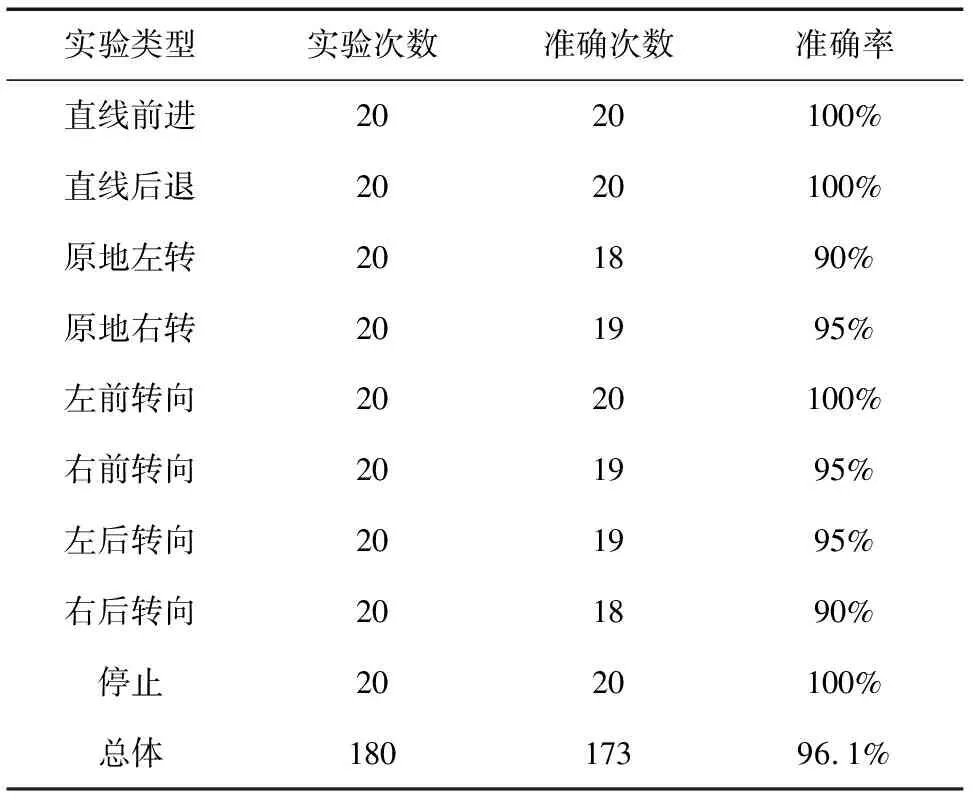
实验类型实验次数准确次数准确率直线前进2020100%直线后退2020100%原地左转201890%原地右转201995%左前转向2020100%右前转向201995%左后转向201995%右后转向201890%停止2020100%总体18017396.1%
6 结束语
为了解决老年人的户外出行问题,自主开发设计了一台助老伴行机器人,该机器人具有助力伴行和轮椅输送等功能。对机器人的整体、各功能部件和控制系统进行了具体的设计。最后,搭建实验平台对机器人的功能进行了试验验证。结果表明,机器人能够很好地满足老年人的户外行走需求,其在线行走驱动实验的准确率达到了96.1%,可行性较高。目前机器人可以实现基本功能,但仍存在以下不足:机器人过于笨重,不能随意的存放和移动;没有考虑老年人的舒适性。基于此,未来将从机器人的轻量化和舒适性两个方面进行相应的研究。
参考文献:
[1] KONG J S, LEE D K, NAM Y S, et al. Optimized walking will recognizing system of the walking aid with the fuzzy algorithm[J]. Korean Institute of Intelligent Systems, 2008(18): 692-699.
[2] YUK G H, PARK H S, DAN B J, et al. Development of smart mobile walker for elderly and disabled[C]// The 22nd IEEE International Symposium on Robot and Human Interactive Communication Gyeongju, Korea,2013: 300-301.
[3] LEE G, OHNUMA T, CHONG N Y, et al. Walking intent-based movement control for JAIST active robotic walker[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2014, 44(5): 665-672.
[4] ASKER A, ASSAL S F. Kinematic analysis of a parallel manipulator-based multi-function mobility assistive device for elderly[C]// Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics, 2015: 676-681.
[5] MOON M K, KIM S C. Usability evaluation of movement support service robot for elderly[M].Advances in Ergonomics Modeling, Usability & Special Populations, Springer International Publishing, 2017.
[6] 平伟.智能助行机器人概念样机设计[D].上海:上海交通大学,2009.
[7] ZHANG L, CAO Q X, LENG C T, et al. The development of walking assistant robot for the elderly[J]. Key Engineering Materials, 2011, 467-469: 1893-1898.
[8] 方芳,周武啸,韦巍,等.助行机器人系统设计[J].传感器与微系统,2010,29(8):120-122.
[9] 魏晓娟.助老助行机器人的触滑觉驱动控制技术研究[D].西安:西安交通大学,2012.
