基于保护映射理论的航空发动机增益调度控制
2018-06-01,,,
,,,
(1.南京航空航天大学能源与动力学院,江苏 南京 210016;2.江苏省航空动力系统重点实验室,江苏 南京 210016)
0 引言
航空发动机是一个强非线性的复杂系统,在范围宽广的飞行包线内工作时,发动机的工作状态随外界的变化而不断变化。传统非线性系统控制方法的基本思想为对非线性模型中的一些稳定设计点进行线性化以获得对应各个点的线化模型,然后针对各线化模型分别设计控制器,运用拟合或插值的方法将各个控制器联系起来[1]。在传统变增益控制器的设计过程中,针对每个设计点设计的控制器能够满足控制系统的性能要求,但是难以保证系统的全局控制性能[2],且对所选取的设计点数量依赖程度较高。
Saydy等人提出的保护映射理论可分析参数化矩阵族和多项式的广义稳定性[3]。参考文献[4]将保护映射理论第一次用在飞机的控制系统设计中,通过目标稳定区域的确定来表示飞行操纵品质指标。参考文献[5]将保护映射理论应用在高超声速飞行器的控制方法设计上,使得高超声速飞行器在大范围包线内工作时能够保持稳定。
将基于保护映射理论的控制方法应用于航空发动机控制中,可通过初始控制器直接获得整个调度参数变化范围内的控制器,能够解决传统变增益控制方法所存在的难以保证全局控制性能问题。
1 航空发动机LPV模型
航空发动机的LPV模型为:

(1)
状态向量x∈Rn;输出向量y∈Rm;控制向量u∈RP;调度参数向量ρ∈Rj;系数矩阵A(ρ),B(ρ),C(ρ)和D(ρ)中的所有元素与ρ存在函数关系。
研究对象为某型涡扇发动机,其为双转子结构,并以航空发动机最主要的控制通道为例进行控制系统设计。文中所采用的发动机参数均为相似归一化后的相对参数,通过对发动机参数进行相似归一化处理,可以避免各个物理量之间很大的数量级差别而导致建模精度降低。建立线化模型时,选择输入量为主燃烧室的供油量增量ΔWf,输出量为高压转子转速 Δnh增量,状态量为低压转子转速增量Δn1和高压转子转速增量Δnh。

(2)

(3)
为了验证所建LPV模型的精度,选择在任意两个转速点(nh=0.974 )处,使LPV模型和非线性模型在相同的阶跃输入下,计算得到高压转子转速响应曲线。响应结果如图1所示。

图1 高压转子转速响应曲线
由图1可得,将LPV模型与非线性模型的转速阶跃响应进行比较,跟踪效果较好。
2 保护映射理论
矩阵广义稳定性集合S(Ω) 表示它所包含的矩阵在Ω区域内保持稳定,即矩阵的所有特征值均在Ω区域内。
定义1[8]:矩阵Rn×n到复数域C的映射表示为v。∂S表示集合S的边界,如果矩阵M∈∂S(Ω)的充分必要条件为v(M)=0 ,则映射v是S(Ω)的保护映射,其实质为n×n实矩阵上的标量映射。
如图2a所示区域(即Re(z)<α)的保护映射为:
vα(M)=det(M⊙I-αI⊙I)det(M-αI)
(4)
⊙表示运算Bialternate积。
如图2b所示与虚轴负半轴夹角为θ的2条射线所组成的区域的保护映射为:
vξ(M)=det(M2⊙I+(1-2ξ2)M⊙M)det(M)
(5)
ξ=cosθ。如图2c所示半径为ω的圆形区域的保护映射为:
vω(M)=
det(M⊙M-ω2I⊙I)det(M-ωI)det(M+ωI)
(6)

图2 保护映射的典型区域
其它区域的保护映射表达式,可以根据典型区域通过相关的性质获得,例如:设S(Ω1),S(Ω2),…,S(Ωn)相应的保护映射为v1,v2,…,vn,则S(Ω1∩Ω2…∩Ωn),则的保护映射为v=v1v2…vn。
引理[8]:M(x)=M0+xM1+…+xkMk表示矩阵多项式,x为未知的参数;Mi为已知的常数矩阵。M(x0)相对Ω区域稳定,vΩ为S(Ω)的保护映射,可获得达到控制要求的x[x∈(x-,x+)] 最大范围为:
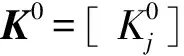
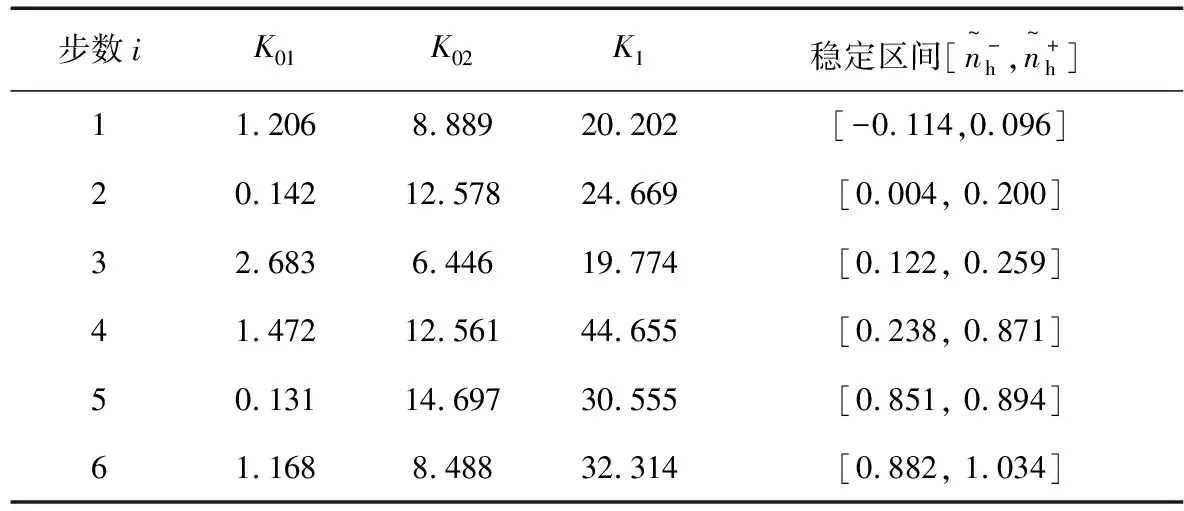
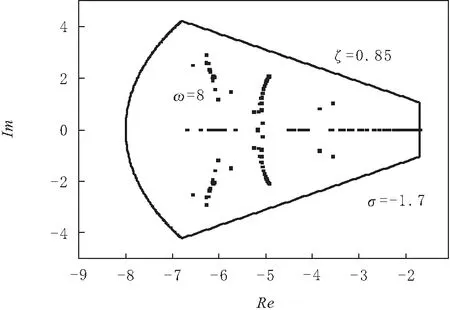
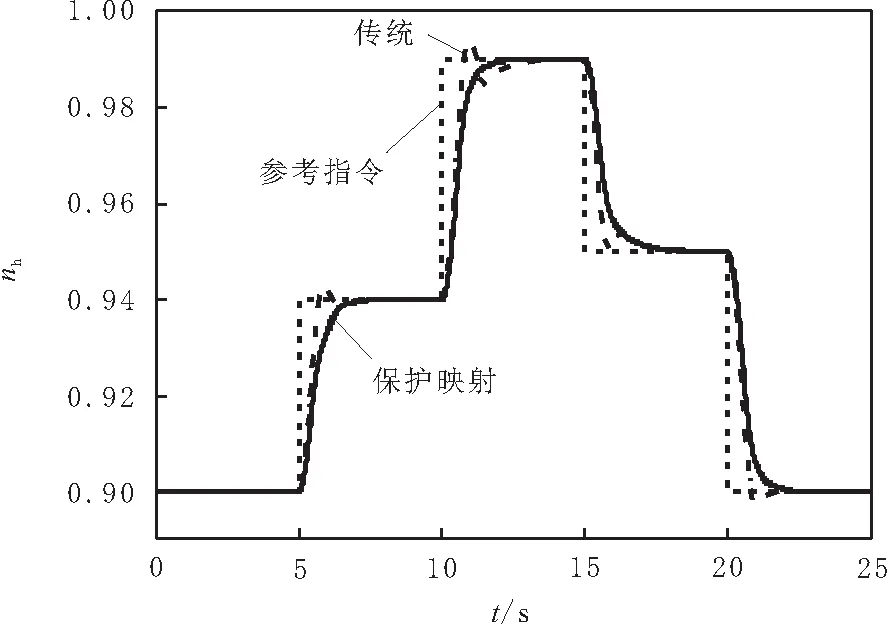
x-≈sup {x (若不存在,值为-∞) (7) x+≈inf{x>x0:vΩ[M(x)]=0} (若不存在,值为+∞) (8) 如图3a所示的稳定集合区域Ω的定义式为 ΩΩ(α,ξ,ω)= {λ∈C:Re(λ)≤α,ξ(λ)≥ξ,|λ|≤ω} (9) ξ(λ)为λ的阻尼比。 如图3b所示的不稳定集合区域Ψ的定义式为 ΨΨ(α,ω)={λ∈C:Re(λ)≤α,|λ|≤ω} (10) 图3 不同类型的区域 定义2[8]:矩阵M为Hurwitz稳定矩阵,其所有特征值为Λ={λ1,λ2,…,λn},区域ΩΛ=Ω(αΛ,ξΛ,ωΛ),其中,αΛ=max{Re(λi)}ξΛ=min{ξ(λi)} ,ωΛ=max{|λi|}。区域Ωt=Ω(αt,ξt,ωt)为目标区域,则定义Ωu=Ω(αu,ξu,ωu),其中,αu=max{αt,αΛ},ξu=min{ξt;ξΛ}ωu=max{ωt,ωΛ}。 定义38]:矩阵M为Hurwitz稳定矩阵,其所有特征值为Λ={λ1,λ2,…,λn},区域ΨΛΨ(αΛ,ωΛ),其中αΛ=max{Re(λi)},ωΛ=max{|λi|}。区域Ωt=Ω(αt,ξt,ωt)为目标区域,则定义Ψu=Ψ((αu,ωu),其中,αu=αΛ,ωu=max{ωt,ωΛ}。 基于保护映射理论的目标区域增益预置算法可根据任意选择的初始控制器增益,计算得到控制器增益向量K,使控制系统的闭环极点位于目标区域Ωt=Ω(αt,ξt,ωt) 内。 算法的具体步骤为: ②计算闭环系统状态矩阵Acl(Kq)的特征值Λq={λ1,λ2,…},若Λq⊂Ωt则跳出循环。 ③根据Acl(Kq)的稳定性来构建新的区域,若稳定,则采用3.1中介绍的定义2构建Ωq=Ωu=Ω(αq,ξq,ωq);若Acl(Kq)不稳定,则采用3.1中介绍的定义3构建Ωq=Ψu=Ψ(αq,ωq)。 ④根据构建的新区域Ωq和Kq,进行如下循环迭代过程: 当‖Kr-Kr+1‖≤εk(1+‖Kr‖) (εk为一较小的正数)时,则跳出循环,令Kq+1=Kr+1;否则,r=r+1,继续求解。 ⑤ 当‖Kq-Kq+1‖≤εk(1+‖Kq‖)时,循环结束,否则,q=q+1,返回到第②步继续运行。 设计满足控制性能要求并与调度参数ρ∈[ρmin,ρmax]相关的全局控制器是LPV模型控制器设计的关键。基于保护映射理论的单参数LPV模型的全局控制器设计流程如图4所示。 图4 单参数模型控制流程 算法的具体步骤为: ①设Acl(ρ,K)为闭环系统状态矩阵,K=[Kj](j=1,…,m)为控制系统增益向量。首先,设ρ=ρ0=ρmin,则控制对象变为固定参数的模型。 ②利用3.2中的算法求得满足控制要求的增益向量Ki。 采用状态反馈控制结构,且为了使闭环系统的输出稳态误差为0,将差值的积分增广成系统的状态量xe。在LPV模型的基础上,所设计的航空发动机控制系统结构如图5所示。 图5 控制器结构 在航空发动机控制系统的设计过程中,最重要的是所设计的控制系统应满足性能指标要求,本文的控制器设计指标考虑衰减系数α、阻尼比ξ和自然频率ω。为保证系统具有良好的性能,确定3个设计指标分别为α≤-1.7,ω≤8,ξ≥0.85。根据保护映射性质构建目标区域保护映射为: vΩt(Acl)=vα(Acl)vξ(Acl)vω(Acl) (11) 表1 控制器设计结果 根据所设计的控制器计算不同转速下的闭环系统极点,其分布图如图6所示,可以看出闭环系统极点均位于目标区域内,达到了预期的设计目标。 图6 闭环系统极点分布 为了验证所设计的控制器性能,以发动机非线性模型为被控对象来进行仿真分析。选取采用传统变增益控制方法设计的在航空发动机控制中运用较多的PI控制器作为比较对象,其设计方法为:在相对高压转子转速变化区间内等间距的10个点处,通过遗传算法[9]整定PI参数值,最后采用插值的方法将各个点的控制器联系起来。H=0 km,Ma=0 点的阶跃仿真结果如图7和图8所示。在H=6 km,Ma=0.6点采用相同的方法设计控制器并进行阶跃仿真,其仿真结果如图9和图10所示。 图7 H=0 km,Ma=0处高压转子转速阶跃响应结果 图8 H=0 km,Ma=0处高压转子转速大范围阶跃响应结果 由图7~图10可以看出,基于保护映射理论设计的增益调度控制器的控制效果与传统变增益控制方法设计的控制器的控制效果相比,具有更好的动态响应,且对参考指令信号的跟踪迅速且平稳。在基于保护映射理论设计的控制器增益的控制下,系统响应曲线的调节时间小于2 s, 超调量小于1%,稳态误差为0,满足控制系统性能要求。 图9 高压转子转速阶跃响应结果 图10 高压转子转速大范围阶跃响应结果 针对航空发动机变增益控制中存在的全局控制性能问题,将基于保护映射理论的控制方法用于航空发动机的控制系统设计中,它是一种综合设计方法,可以自动地获得全局控制器参数,避免了传统变增益控制方法在各设计点分别设计控制器的不足,保证了全局控制性能。在航空发动机非线性模型上的仿真结果表明其具有良好的控制效果。 参考文献: [1] 姜锐. 航空发动机线性变参数控制方法研究[D]. 南京:南京航空航天大学, 2015. [2] LU B, WU F, KIM S W. Switching LPV control for high performance tactical aircraft[R]. AIAA-2010-7903, 2010. [3] SAYDY L, ANDRE L T, EYAD H A. Guardian maps and the generalized stability of parametrized families of matrices and polynomials[J]. Mathematics of Control Signals and Systems, 1990, 3(4): 345-371. [4] SAUSSIE D, SAYDY L, AKHRIF O, et al. Gain scheduling with guardian maps for longitudinal flight control[J]. Journal of Guidance Control and Dynamics, 2011, 34(4): 1-15. [5] 刘梦影, 刘燕斌, 肖地波, 等. 高超声速飞行器应用保护映射的大包线控制律[J]. 控制理论与应用, 2015, 32(11): 1540-1550. [6] 樊思齐, 李华聪, 樊丁, 等. 航空发动机控制[M]. 西安:西北工业大学出版社, 2008. [7] 冯正平, 孙健国. 航空发动机小偏差状态变量模型的建立方法[J]. 推进技术, 2001, 22(1): 54-57. [8] 李臣亮, 刘燕斌, 彭福军, 等. 保护映射理论在火星无人机鲁棒自适应控制的应用[J]. 宇航学报, 2014, 35(11): 1261-1269. [9] 刘金琨. 先进PID控制MATLAB仿真[M].第3版.北京: 电子工业出版社, 2011.3 参数整定算法
3.1 活动区域定义

3.2 目标区域增益预置算法

3.3 单参数模型控制过程



4 控制器设计与仿真
4.1 控制器设计过程

4.2 仿真结果分析


5 结束语
