永磁伺服系统三闭环调节器的设计
2018-05-31李长兵
李长兵
(广州数控设备有限公司,广东广州510006)
0 引言
在设计永磁伺服系统三闭环控制器时,设计电流环的主要目标是电流环的响应速度,对电网电压的抗干扰作用是次要的[1],因此电流环常采用PI控制。转速环需要对负载变化起抗扰作用,同时还要兼顾转速环的响应性能[2]。由于位置环的特殊性,不能出现超调,故一般采用单纯的比例控制[3]。
本文介绍了伺服系统三闭环控制器的模型,然后针对转速的抗扰性能和响应速度,介绍了三种不同的转速环控制器,通过对比分析了各自的优缺点。在实际生产过程中,可以选择不同的控制器来解决伺服系统响应速度与抗扰性的问题,使伺服控制系统满足生产生活控制的要求。
1 伺服系统三闭环模型
永磁伺服系统由内到外分别为电流环、速度环、位置环,其简化的结构框图如图1所示。

图1 永磁伺服系统结构框图
图中,β、α分别为电流环和速度环的反馈系数;θref、θ为给定转角和实际转角;APR为位置调节器;ωref、ω为给定转速和实际转速;ASR为速度环调节器;Ton、Toi分别为速度环、电流环的滤波时间常数;iqref、iq为给定电流和实际电流;ACR为电流环PI调节器;Ts为逆变器的失控时间;Tl为电磁时间常数;Kt、Ce分别为电磁转矩系数和反电动势系数;TL为负载转矩;J为转动惯量。
2 永磁伺服系统三闭环控制器的设计
2.1 电流控制器
不考虑反电动势的影响,电流环结构原理图如图2所示。

图2 电流环结构原理图
需要注意的是,电流中的谐波分量主要来源于SVPWM逆变器,谐波主要集中在采样频率fΔ及fΔ的整数倍附近,所以电流滤波时间常数Toi通常选择为,其中fΔ为采样频率。考虑到电流环的快速响应特性,将调节器的零点和对象中的大的时间常数极点Tl相抵消,即可求得电流控制器的PI参数。
2.2 转速控制器
由于传统的PI调节器存在超调大、抗扰性较差等缺点,本文采用了IP调节器,其原理图如图3所示。
从控制框图中可以看出,积分环节保证了系统闭环响应时没有稳态误差,同时避免了微分突变的影响。IP形式的转速调节器是通过牺牲系统的快速性能来提高系统抗扰性能。
速度环采用PI控制器时,调整时间较IP快,但超调较大;虽然速度环采用IP控制器的超调较小,但调整时间较长。为了结合二者的优点,速度控制器可采用PDFF速度控制器,其控制框图如图4所示,图中Td为输入的扰动信号。
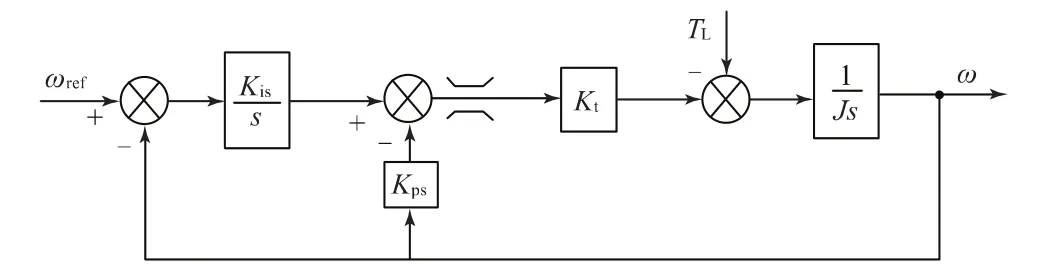
图3 IP结构转速调节器原理图
PDFF控制器是一种较灵活的速度环控制器,当改变PDFF控制器参数Kvi、Kvp、γ的值时,将构成不同的速度环控制器。当γ=0时,PDFF结构就变成了IP控制器的结构;当γ=1时,控制器类似PI结构;其还可以构成前馈控制器等。
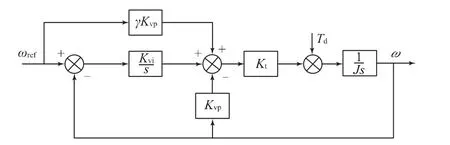
图4 PDFF速度环控制框图
2.3 位置控制器
设计位置调节器时,考虑到系统速度响应远比位置响应快,即位置环截止频率远小于速度环各时间常数的倒数,在分析系统时,可以将速度环近似等效成一阶惯性环节。速度等效以后,将位置环校正成典型Ⅰ型系统。设位置环比例系数为Kpp,开环传递函数为:

由于位置环的特殊性,不能出现超调,阻尼系数ξ=1,即可求出比例系数。
3 系统仿真分析
表1给出了永磁伺服系统电机的相关参数。电流环、转速环均采用PI结构,位置环采用比例控制,系统仿真框图如图5所示。
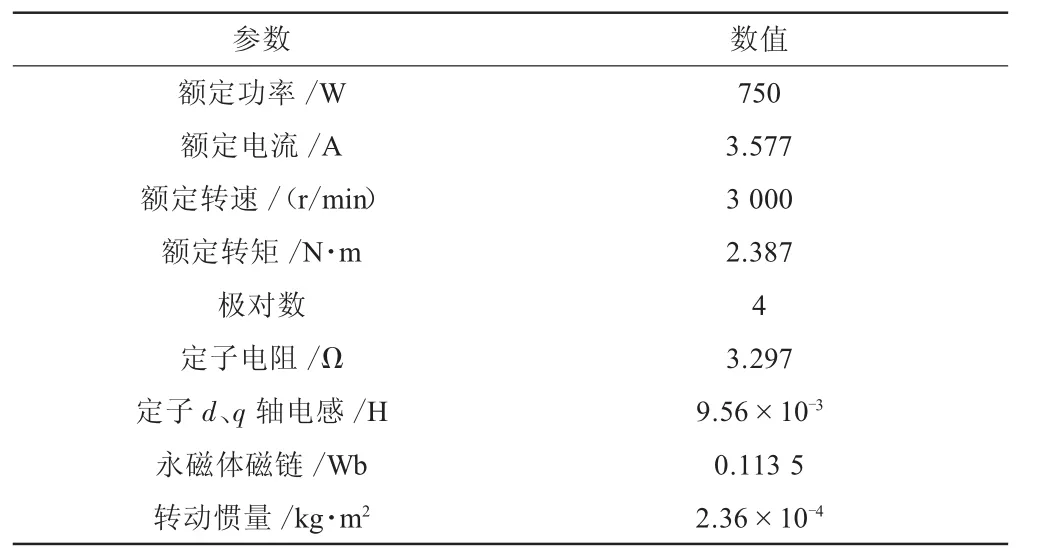
表1 永磁伺服电机参数表
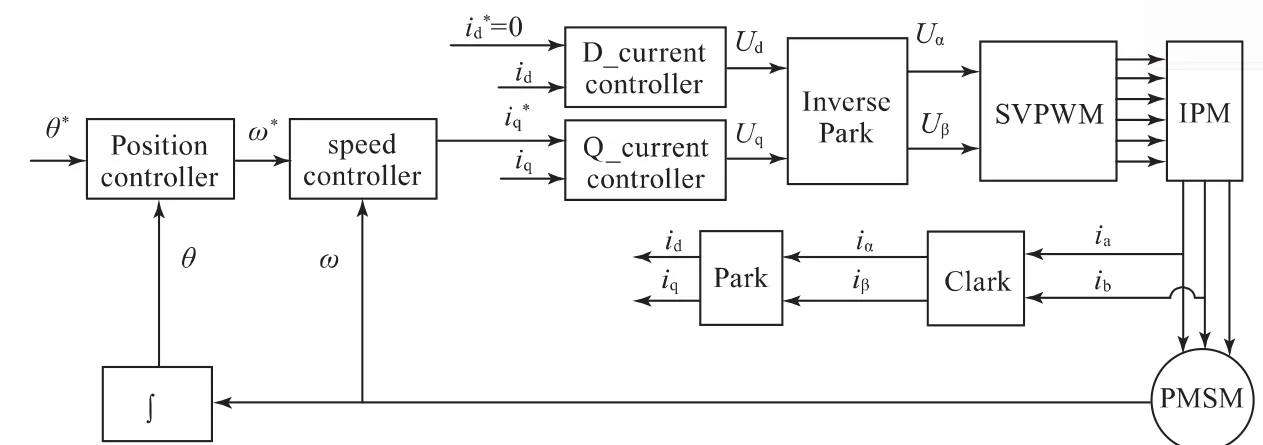
图5 三环伺服系统矢量控制仿真框图
仿真时,位置给定为斜率为10的斜坡信号。图6~图8从上到下分别为电流环、转速环、位置环仿真波形图,比较不同速度环控制器对电流、转速、位置的跟踪效果。在时间t1=0.04 s时加0.5倍的额定负载,观察电机从空载到负载状态时的响应效果;系统稳定后,在t2=0.08 s时去掉0.5倍的额定负载,观察电机从负载状态到空载的仿真效果。
4 结语
IP控制前向通道需要经过一个积分环节,响应时间较长,但是对干扰系统可以较快地恢复;PI控制的响应速度快于IP控制器,但抗干扰性能不及IP控制器;因此,将PDFF控制器引入永磁交流伺服系统,在参数设置合适时,其既具有PI的快速性又有IP的抗扰性。

图6 PI结构三环仿真图

图7 IP结构三环仿真图

图8 PDFF结构三环仿真图
[1]阮毅,陈伯时.电力拖动自动控制系统 运动控制系统[M].4版.北京:机械工业出版社,2009.
[2]曾孟雄,赵千惠,欧阳文.基于PMSM的三环数控交流伺服系统[J].组合机床与自动化加工技术,2012(5):45-48.
[3]钱健.永磁同步电机伺服控制系统研究[D].徐州:中国矿业大学,2016.
