基于LabVIEW的PMSM参数自动识别系统*
2018-05-29赵不贿
陈 震, 赵不贿
(江苏大学 电气信息工程学院,江苏 镇江 212013)
永磁同步电机(PMSM)结构简单、效率高、损耗小、可靠性强、具有较高的功率因数,正得到越来越广泛的应用.矢量控制是永磁同步电机的主要控制方式,而矢量控制主要依赖于电机的电压模型及其参数的准确性.电机参数的精度对其影响较大,为了精准地完成矢量控制,必须对电机的参数进行辨识.永磁同步电机参数的测量目前主要是由人工采用特定的测量仪器来完成[1-3],无法在线调整.
为此,本文在深入分析永磁同步电机矢量控制的数学模型的基础上,提出一种自动辨识永磁同步电机参数的方法,利用虚拟仪器技术,以LabVIEW为开发平台设计了一种PMSM参数自动识别系统.该系统能自动测量出电机的相关参数,包括定子电阻R、交轴电感Lq、直轴电感Ld、反电动势系数Ke、转矩系数Kt、摩擦系数B和转动惯量J.
1 矢量控制永磁同步电机参数的识别
1.1 永磁同步电机的数学模型
PMSM在d-q坐标系下的定子电压方程为[4-5]:
(1)
(2)
当采用id=0的矢量控制方法时,转矩方程为:
(3)
机械方程为:
(4)
式(1)~(4)中,ud、id是d轴的电压和电流,uq、iq是q轴的电压和电流,φm是永磁体转子产生的磁链,ωm是电机的机械角速度,ωr是电机的电气角速度,P是电机的极对数,TL是负载转矩.由式(1)可得反电动势系数Ke=Pφm,由式(3)可得转矩系数Kt=3/2Pφm,即Kt=3/2Ke.
本文提出的电机参数辨识方法是根据PMSM的数学模型,对电机q轴和d轴分别注入不同的电压,产生相应的q轴和d轴电流,从而自动辨识电机的相关参数.具体的辨识方法如下.
1.2 定子电阻的辨识
1.3 交直轴电感的辨识
分别向q轴和d轴注入脉冲电压,控制脉冲电压时长h小于电机的机械时间常数,忽略电机转子的转动量和定子两端的压降,化简式(1)和式(2)可得:
(5)
(6)
由式(5)和式(6)可知,只要测量出交直轴电流的变化量,就可以计算出交直轴电感.与定子电阻测量的方法相似,测量时分别加上两个大小不同但同相的电压,分别测量出电流变化量,通过相减,来消除驱动电路带来的影响.交直轴电感修正后的估测值:
1.4 反电动势系数的辨识
令id*=0,适当加入iq*使电机转动,将式(2)进行拉氏变换可得:
(7)
变换式(7)可得反电动势系数Ke估测值:
(8)
可见,加上一定的交轴电流iq*,分别测出交轴电压和电机转速,利用前面测出的定子电阻和交轴电感,就可以估算出反电动势系数.
1.5 机械参数辨识
电机空载时,通过在不同的时刻加入不同的交轴电流,使电机转速从0增加到稳定值,然后再逐渐降为0的方法测出电机的机械参数.
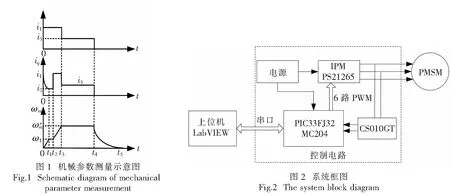
如图1所示,0时刻,设定q轴电流iq*=i1,使电机开始转动,由于耦合电压尚未加入电流控制器,q轴电流会受转速影响拉回至i2,而转速在t2时刻前稳定于ω1,接着将解耦电压加入电流控制器,使q轴电流到达其给定值.加入解耦电压后电机加速,在t3时刻转速上升到稳定值ωm*.由于机械参数还未知,此时启动速度环控制,将速度环的比例增益Ki设为0,积分增益Kp设为1.在速度环的控制下,电机转速通过较长时间达到稳定状态.
接着,撤销电流iq*使其为0,电机开始减速,在t5时刻转速降到零.假设电机转速是线性变化的,那么代入式(4)后整理可得转动惯量:J=B(t5-t4).
2 系统总体设计
依据前述的辨识方法,设计了基于LabVIEW技术的测试系统,系统总体框图如图2所示.测试系统由上位机和控制电路组成.控制电路采用Microchip的PIC33FJ32MC204作为主控芯片,通过霍尔电流传感器CS010GT检测PMSM两相定子电流,根据FOC算法实现电流环、速度环调节,生成6路带死区保护的PWM信号驱动IPM模块,IPM模块采用三菱公司的PS21265,实现DC/AC变换.控制电路通过串口与上位机进行通信.控制电路接收上位机发出的测试指令,对电机相电流进行采样,根据FOC算法产生相应的三相电压加到电机,并将ud、uq、id、iq等数据,通过串口回传给上位机,上位机软件根据相关公式进行计算处理、显示和存储,并将计算得到的参数发送给控制电路.
3 软件设计
3.1 上位机软件设计
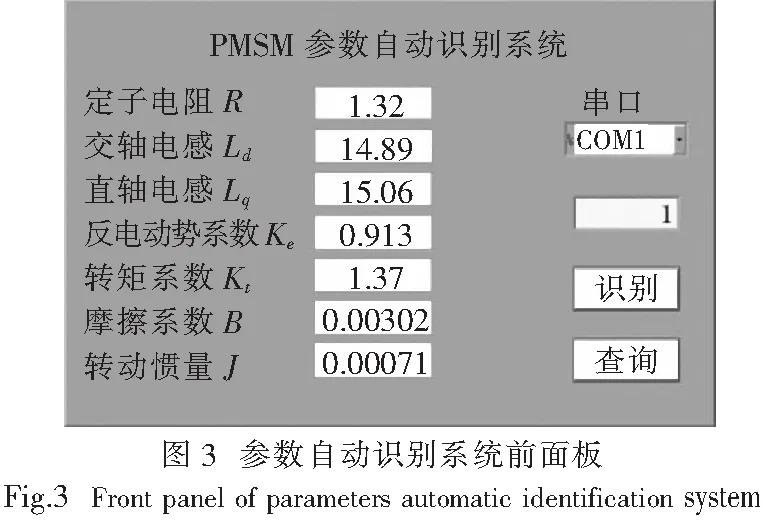
PMSM参数自动识别系统上位机操作界面如图3所示,程序主要完成串口通讯参数设置,数据处理和显示,数据保存.
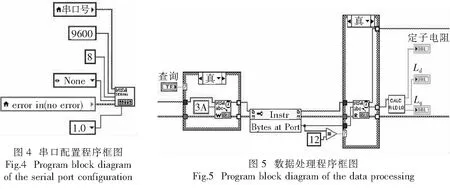
(1) 串口通信.LabVIEW中串口通信由串口配置、串口写、串口读、串口关闭4个步骤构成[6-7].串口配置的程序框图如图4所示.
(2) 数据处理.串口配置后,上位机通过串口写子vi发出参数识别指令,然后根据串口的Bytes at Port 属性节点判断从控制电路接收的字节数是否达到规定数量,若达到,通过串口读子vi将数据读出送到数据处理子vi计算出定子电阻和交直轴电感.程序框图如图5所示.
控制电路根据识别方法经过一定时间的延时,将新的一组数据发送给上位机,上位机结合计算出的定子电阻和交直轴电感,根据估算公式,计算出反电势系数Ke、摩擦系数B、转动惯量J.其中反电势系数在计算时需要将式(8)转换到数字域,转换到数字域的反电势系数计算公式为:

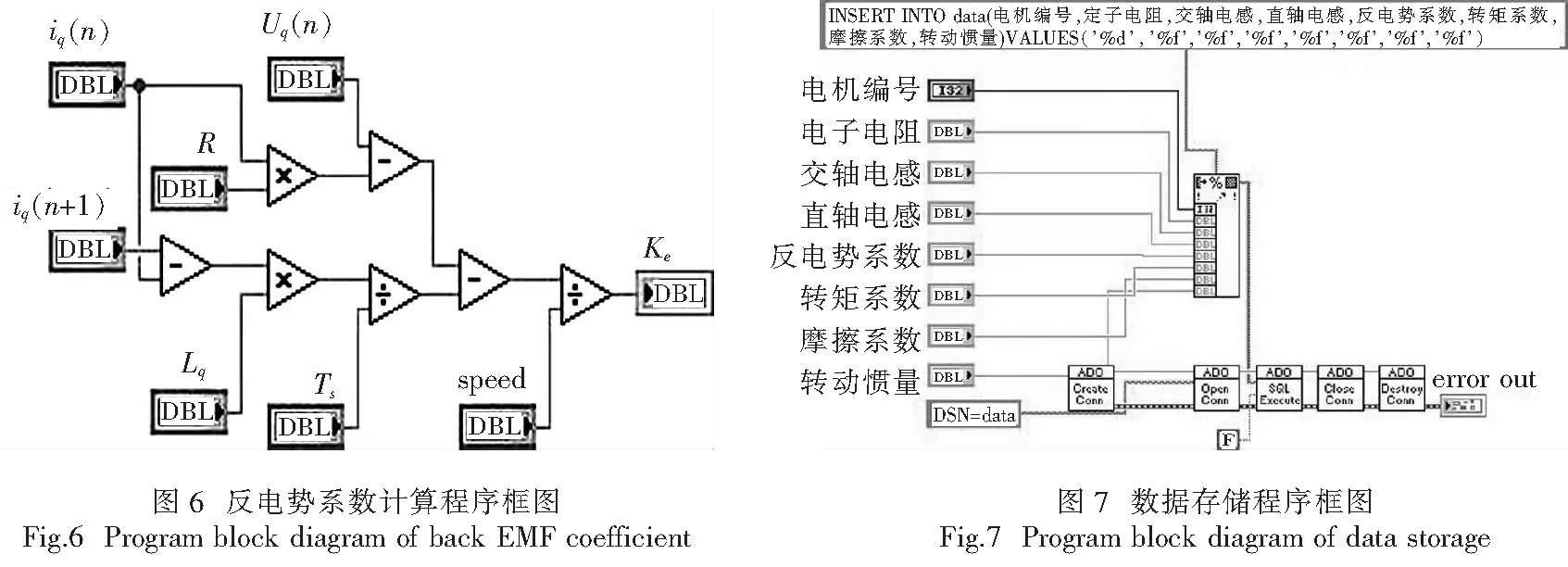
(3) 数据存取.利用免费的数据库访问工具包LabSQL[8]对计算的电机参数进行存储.LabSQL利用Microsoft的ADO以及SQL语言来完成对数据库的各种访问.通过调用LabSQL工具包中的子VIs,将计算得到的定子电阻、交直轴电感、反电势系数、摩擦系数、转动惯量和转矩系数保存到Access数据库中,方便用户今后调出历史数据进行查阅研究.程序框图如图7所示.
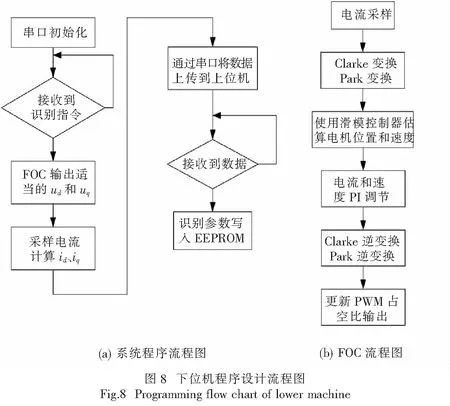
3.2 单片机控制软件设计
单片机的软件设计流程图如图8所示.单片机通过串口接收上位机发出的指令,根据相关指令按照FOC算法输出适当的ud和uq,采样相电流计算出id和iq,将相关数据通过串口回传给上位机,等待上位机计算,并将结果发送给控制器,控制器接收到相关的电机参数后,将其写入EEPROM中供电机进行矢量控制.
在单片机的软件设计中,FOC算法是整个程序设计的核心,FOC算法的流程图如图8所示.
4 实验结果与分析
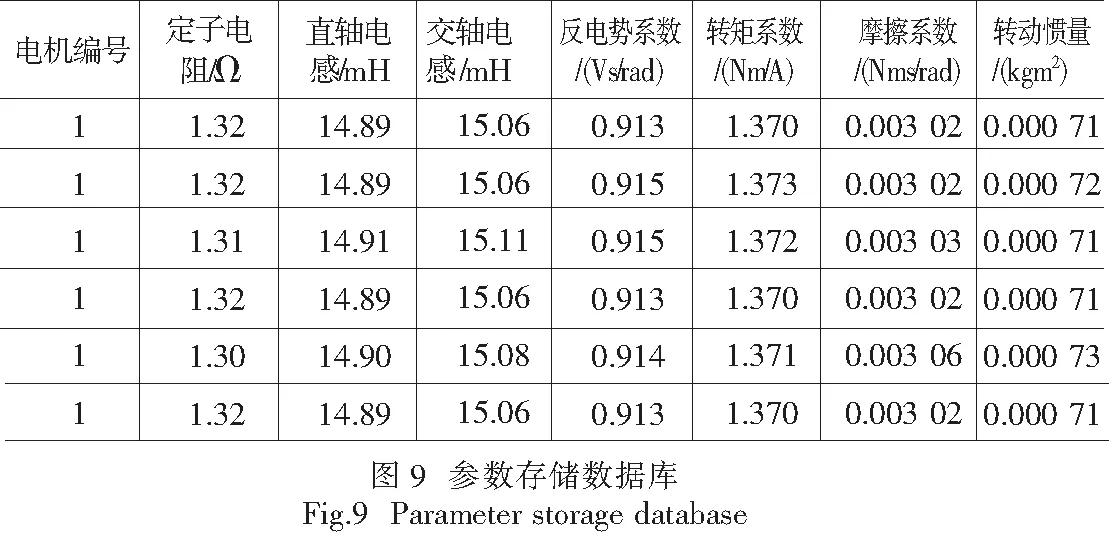
为了验证参数识别方法和系统的正确性,采用400 W、8极的永磁交流电机作为实验样机做了大量的实验.图3是测试程序的前面板,从图中可以看到自动识别的结果.识别生成的Access数据表格如图9所示.
自动识别的结果与传统方法测量结果的比较见表1.从表1中可以看出,参数自动识别的结果与采用传统方式得到的结果相比误差很小,精度很高,所有参数的测量误差都在10%以内.由此可见,该参数识别系统的测试精度和准确度达到了设计需求.
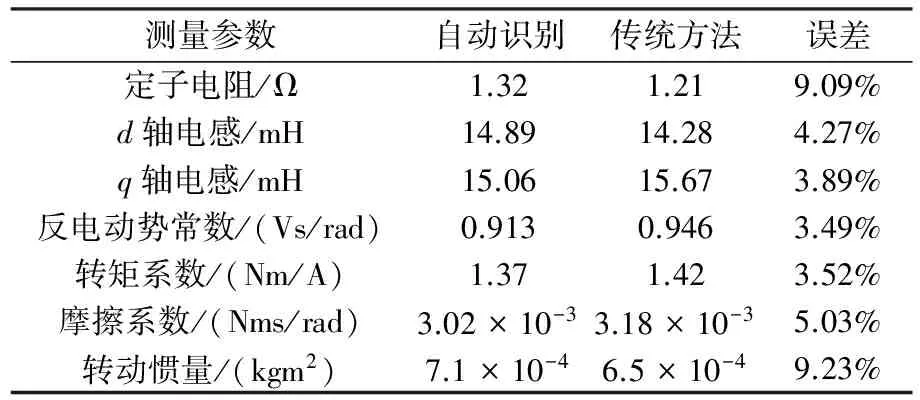
表1 自动识别与传统方法参数测量比较
5 结 论
本文采用一种新颖的在线自动辨识方法,设计了基于LabVIEW的PMSM参数自动识别系统.该系统界面友好,结构简单,自动化程度高,无需任何特定仪器,能自动辨识矢量控制永磁同步电机的电气和机械参数,提高了工作效率.
(陈震兼任泰州职业技术学院副教授)
参考文献
[1] 陈宏,薛晓明.永磁同步电机反电动势系数测量方法的研究[J]. 电测与仪表,2013(8):40-43.
[2] 刘军,吴春华,黄建明,等. 一种永磁同步电机参数测量方法[J]. 电力电子技术,2010,44(1): 46-48.
[3] 张邦富,程明,王伟,等. 基于dSPACE实验平台的永磁同步电机参数测量[J]. 微电机,2013(7):45-47,57.
[4] 刘波. 永磁同步电动机参数静止辨识方法的研究及应用[J]. 微特电机,2014(9):53-57.
[5] 肖海峰,刘海龙,贺昱曜. PMSM的线性-滑模变结构直接转矩控制研究[J]. 电气传动,2014(5):35-39.
[6] 刘海洋,王慧,陈智,等. 温室环境信息实时监测与控制系统的设计[J]. 农机化研究,2014(4):65-69.
[7] 马志飞,张亚,李波,等. SLD光源可靠性试验数据采集系统设计[J]. 电子技术应用,2013(09):96-98.
[8] 赵义满,孟婥,陈玉洁,等. 基于LabVIEW的光伏电站监控系统[J]. 仪表技术与传感器,2014(5):50-53.
