基于圆形感兴趣区域的CT图像快速重建
2018-05-28,,,,
,,, ,
(中北大学 仪器科学与动态测试教育部重点实验室,太 原 030051)
计算机断层成像技术(CT)的基本原理是:对物体进行不同角度的射线投影,使用探测器接收携带物体内部结构信息的射线强度信息,再通过特定的重建算法重建出物体的内部结构[1]。CT重建算法目前主要有解析法和迭代法两种[2]。解析法相对于迭代法,计算量小,重建速度快,便于硬件实现,但其对投影数据的完整性、噪声含量、射线源的扫描轨迹以及射线源锥角大小的要求较高。CT技术现已广泛应用于工业无损检测中,在实际工业检测时,检测人员有时仅对工件的一小部分感兴趣,但因无法确定感兴趣区域(ROI)的具体位置与大小,所以只能对整个工件进行全局重建,这样不仅耗时长且效率低[3]。
固体火箭发动机的构造复杂,体积庞大,制造成本昂贵,因此不能通过直接点火发射进行试验,而需要通过合适的手段对其进行无损检测[4]。针对上述问题,笔者提出了一种对固体火箭发动机的感兴趣区域进行精细快速重建的方法,该方法相对全局ART(代数重建法)重建算法来说,能在保持同等分辨率的情况下节省大量时间,有利于工程实践。
1 快速整体重建
解析法是目前应用最广泛的方法,包括傅里叶变换重建、滤波反投影和卷积反投影等方法。解析法在实际数据采集时无法避免噪声,在某些情况下,由于被测物体体积较大,无法采集到完整的数据,因此在实际工业中受到了限制[5-6]。笔者所用的数据均为完整数据,拟采用等角扇束滤波反投影法进行快速整体重建。
(1) 修正投影函数
假定β角下的投影函数是pβ(γ),若以等角度Δγ采样,则有
pβ(γ)=pβ(nΔγ)
(1)
式中:n为等角度Δγ的个数。
得到修正后的投影函数为
Pβ(nΔγ)=pβ(nΔλ)Dcos(nΔγ)
(2)
(3)
式中:D为射线源到旋转中心的距离;N为探测器通道数。
(2) 加入滤波函数
投影数据修正后与R-L滤波函数h′(γ)作卷积运算,得到
Cβ(nΔγ)=Pβ(nΔγ)*h′(nΔγ)
(4)
(5)
(3) 加权反投影
将得到的卷积计算结果Cβ(nΔγ)乘以权重因子1/L2,再作反投影,得到所需图像f(γ,φ)。
扇束滤波反投影重建的公式为
(6)

(7)

(8)
式中:r为重建点的极坐标;φ为笛卡尔坐标。
2 基于ROI的精细重建
2.1 ROI的划定
利用得到的快速整体重建图像可得到缺陷所在的位置以及对应的坐标,通过计算得到ROI的圆心及半径,再利用圆心及半径得到一个圆形ROI。
2.2 对ROI重建
迭代法中最基本的是ART,其基本思想是先将被测物体离散化为多个像素,再求解一个大型的线性方程组。迭代法虽然计算量大,重建速度慢,但是对数据完整性要求低,重建得到的图像也较好。ART重建法的迭代公式为
(9)
式中:k为迭代次数;pi为实际的投影值;wij为权因子;λk为第k次迭代过程中的松弛因子,λ∈(0,2);J为像素序号的最大值;win为权因子。
重建步骤是:
(1) 建立直角坐标系,确定射线源坐标以及离散化后被测物体的每个像素单元的坐标、探测器探测单元的坐标。
(2) 设定图像的初值,令x(0)=0。
(3) 在一个投影方向下,确定当前射线的方程,计算当前射线穿过被测物体的体素单元的权值wij。
(5) 用第(4)步得到的更新系数C修正第i条射线经过的体素单元。
(6) 对该投影方向下的所有射线重复步骤(3)~(5),完成该方向下所有射线对重建图像的更新。
(7) 对其余的投影方向重复步骤(3)~(6),直到完成所有投影方向下的所有射线对重建图像的更新,即完成一次迭代。
(8) 将上一次迭代重建的结果作为初值,重复步骤(3)~(7),开始下一次迭代,直到重建图像满足一定的收敛准则。
3 针对某固体火箭发动机的ROI重建
某固体火箭发动机模拟件的CT检测采集的射线源电压为290 kV,电流为1.8 mA。平板探测器有1 920×1 536个探测单元,每个探测单元的大小为0.127 mm。射线源到旋转中心的距离为1 060 mm,旋转中心到探测器的距离为140 mm。物体绕旋转中心旋转360°,每隔1°采集1幅投影图像。且该固体火箭发动机模型中间填充了高密度的人工炸药,上面有2个深浅不同的人工设计孔缺陷。
对某固体火箭发动机先采用解析法和代数迭代法分别进行全局重建,可以得到如图1,2所示的重建模型。解析法对全局的重建时间为86 s,代数迭代法对全局的重建时间为1 398 s。

图1 某固体火箭发动机的等角扇束滤波反投影重建图和代数迭代重建图

图2 不同等角扇束的重建图
由试验结果可以得出,解析法时间很短,但是得到的重建结果噪声比较大,图像较为模糊;迭代法得到的图像明显比解析法得到的图像清晰,但是迭代法耗费的时间较长。
笔者提出的算法很好地解决了上述问题,具体步骤如下所述。
(1) 首先对固体火箭发动机的投影数据进行低分辨率等角扇束滤波反投影算法,重建图像大小为512×512,设定的等角分别为1°,0.01°,可以得到不同等角扇束重建图(见图2),可以看出等角扇束为0.01°时重建得到的图像更清晰,因此选择用等角扇束为0.01°来进行快速重建,结果如图3所示。
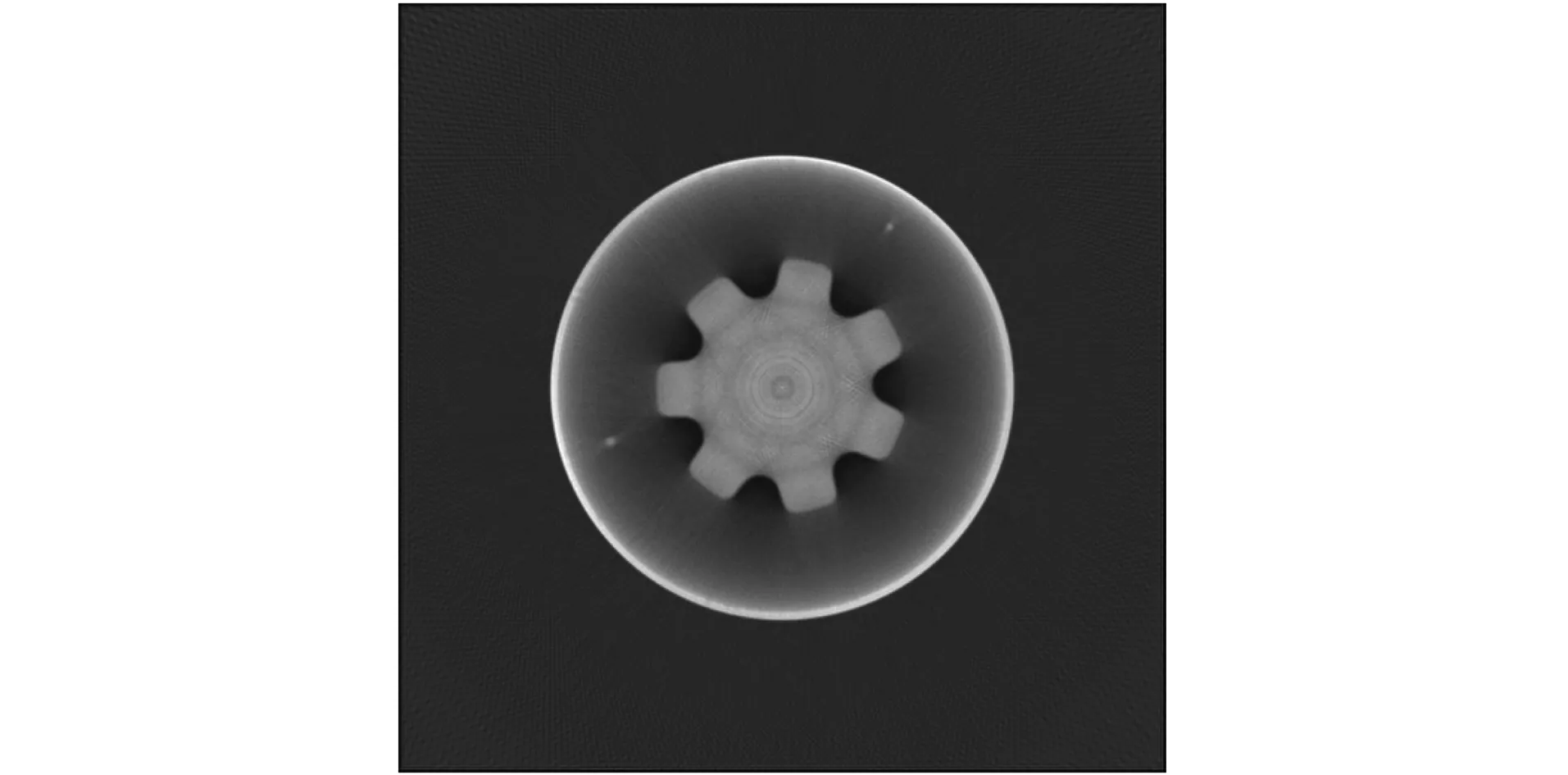
图3 等角扇束为0.01°的滤波反投影重建图
(2) 从图3可以看出,固体火箭发动机模型有两个设计孔缺陷,大致的缺陷坐标为(140,290),(330,145),通过计算分析确定ROI圆心坐标为(198,218),半径为128,得到的圆形ROI划定如图4所示。

图4 圆形ROI划定
(3) 对所得到的ROI图做精细迭代重建,设定图像初值为0,松弛因子为0.15,迭代次数为25,探测器通道个数为729,投影数据访问方式为顺序访问。得到感兴趣区域的重建图如图5所示。
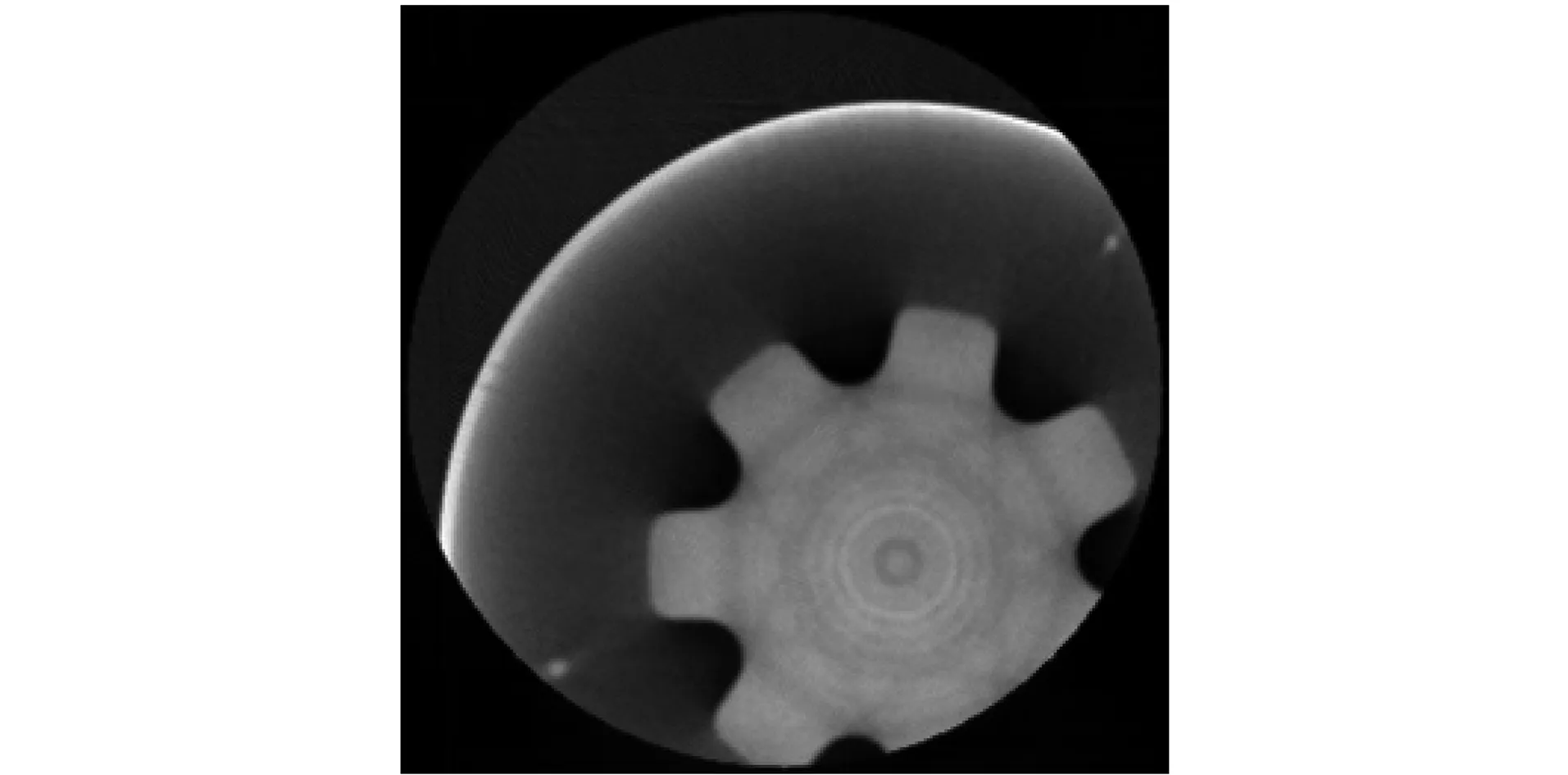
图5 感兴趣区域重建图
文中提出的解析法所用时间为86 s,迭代法为282 s,一共只需要368 s,而对整个固体火箭发动机的迭代重建需要1 398 s,全局迭代重建时间较ROI重建时间多了3倍。
4 结语
在实际检测中,对被检工件进行CT整体检测的重建数据量大,重建时间长,而人们感兴趣的往往是内部有无缺陷以及缺陷的局部信息。缺陷的出现具有一定的随机性,无法依靠一般的局部重建在检测开始前就确定重建区域,而且并不是工件的每一个部分都需要用最高的空间分辨率进行检查。如果
可以确定重点可疑区域,即工件的ROI,则可以通过重建高分辨率局部感兴趣图像来判断该区域有无缺陷,如同医生通过CT诊断病情一样,不仅可以实现缺陷的可视化检测,而且通过对局部数据进行重建,减少了数据的采集时间和重建时间,也提高了数据扫描和数据重建的速度。
参考文献:
[1] 杨娟. 锥束工业CT迭代重建算法及伪影校正技术研究[D]. 太原:中北大学, 2015.
[2] 王浩. CT不完全投影数据重建算法研究[D]. 大连:大连理工大学, 2008.
[3] 李亮, 陈志强, 康克军. CT局部重建算法发展综述[J]. 核电子学与探测技术, 2005, 25(6):881-886.
[4] 张卫贞. 固体火箭发动机ICT局部重建算法研究[D]. 太原:中北大学, 2009.
[5] 黄力宇, 朱守平, 匡涛. 医学断层图像重建仿真实验[M]. 西安:西安电子科技大学出版社, 2015.
[6] 赵双任, 杨新铁. 图像重建的分块迭代算法[J]. 中国科技论文, 2006, 1(4):301-308.