机载摄录设备用于海上水柱偏差测量方法研究
2018-05-26齐凤梅江雷
齐凤梅,江雷
(92941部队91分队,葫芦岛 125000)
舰炮对海射击时,需要测量水柱偏差来判定射击的命中概率。高弹道反舰导弹俯冲攻击靶船时,如果不能直接命中靶船,同样需要测量水柱偏差。传统的陆基光学交会和雷达单站测量弹丸或水柱的方法,因受布站和作用距离限制,测量精度低,无法满足水柱偏差测量要求;舰载装备交会或单站测量,受舰艇摇摆影响难以跟踪弹丸,也无法精确测量水柱位置。因此,水柱偏差测量一直以来是靶场测控的瓶颈问题,直接制约了海上试验鉴定能力,必须寻求新的测量方法,实现舰炮对海射击水柱偏差测量的难题。
为完成海上中靶图像获取任务,靶场研制了摄录型无人机,并先后完成了导弹俯冲攻击靶船和舰炮对海射击的图像摄录任务。基于该型无人机摄录图像的水柱偏差测量方法,可解决水柱偏差测量问题,且方法可靠,实现方便,测量精度较高。
1 摄录型无人机相关技术指标
无人机飞行高度:≤5000m;
最大飞行速度:≥150m/s;
最小盘旋半径:≤1000m;
GPS定位精度:≤5m;
相机视场角:36°×27°~1.8°×1.35°;
相机分辨率:768×576;
相机变焦:≥20倍;
相机像元尺寸:30μm。
2 传统基于共面基准点标校测量方案
靶场海上测量环境不理想,只有一台相机,不能进行交会测量。无人机上的相机是变焦距镜头,因而不能在地面完成相机标校。针对图像的标校测量,国内外已有很多学者进行研究[1],但是相机畸变校正大大增加了算法的复杂度,而且所需矩阵初值不易确定,不适用海上靶场特定应用。针对靶场试验情况,可行的测量方法是共面基准点测量。
共面基准点标校测量方法是:解4个以上共面基准点的共线方程组得出相机内外参数矩阵,再将目标的像素坐标代入共线方程组解算目标位置。该方法的优点是不依赖平台自身的位置姿态,就可以实现对水柱位置的可靠测量。具体过程如下:
2.1 共面基准点标校测量方法
2.1.1 物点成像投影关系
根据理想的小孔成像模型[2],透镜成像关系中物点、像点对应位置关系如图1所示,为完成世界坐标物点坐标与相机坐标的转换建立以下几个坐标系[3-4]:
(1)像机坐标系Oc-XYZ,以相机光心为原点,以垂直于图像平面的相机光轴为Zc轴,Xc轴和Yc轴平行于图像平面;
(2)图像像素坐标系O-XY,在像素平面内,X、Y轴分别与Xc、Yc轴平行;
(3)物体的三维世界坐标系Ow-XYZ,用户自定义。
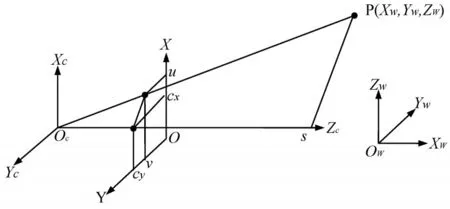
图1 相机成像示意图
透镜成像中物点、像点、光心三点共线的共线方程如下:

或者:
式中,(X,Y,Z)是一个物点的世界坐标;(u,v)是该物点投影在图像平面的坐标,以像素为单位;(cx,cy)是基准点(通常在图像的中心);fx,fy是以像素为单位的焦距值;s是物点到光心的距离在光轴上的投影,s≠0。
矩阵A被称作摄像机矩阵,或者内参数矩阵,矩阵[R|t]被称作外参数矩阵,它是一个旋转-平移矩阵,R是旋转矩阵,是单位正交矩阵,t是平移矩阵,分别表示相机坐标系相对于世界坐标系的旋转关系和平移量。
将投影矩阵A·[ ]R|t展开得到矩阵M:
2.1.2 解共面基准点方程组求解投影矩阵
靶场测量时,世界坐标系原点选在靶船中心,X轴水平指向船艏,Z轴竖直向上,建立右手坐标系,在靶船上设置6个的基准点,测量出每个基准点坐标(X,Y,Z),每个基准点Z坐标均为0,将Z=0代入方程,对投影矩阵进行简化移项。得到齐次共线方程:

4个基准点坐标(X,Y)和像点坐标(u,v)简化的得到8个方程,解算出部分参数比例关系,再利用旋转矩阵R的单位正交性就可以计算出全部内外参数矩阵。
2.1.3 解算目标位置
矩阵M中的所有元素都在前一步中计算出来,将u、v、Z视为已知数,则公式(4)就成为关于X、Y的二元一次方程组,解这一方程组就能得目标点大地坐标(X,Y)。
由于靶船基准点相对海面高度是固定的,试验前已经测量得到,如靶船甲板距水面1m,则Z=-1m,对图像判读得到水柱中心像素坐标u、v,带入X、Y的计算公式得到水柱的位置坐标,完成水柱偏差的测量。
2.2 测量精度仿真分析
相机分辨率为768×576,观测范围约400×400m2,飞机高度1000m,距离靶船水平距离2000m,靶船长70m,宽15m,在靶船甲板上设置6个标志点。在上述摄录条件下,确定相机视场角度,生成理想的投影矩阵,计算基准点和目标点的像素坐标。给基准点位置加上0.05m的随机误差,给像素坐标位置加上2个像素的随机误差。用带误差的像素坐标进行标校计算得到目标位置,与理论值比较得到水柱偏差的测量误差。仿真计算结果如图2所示。
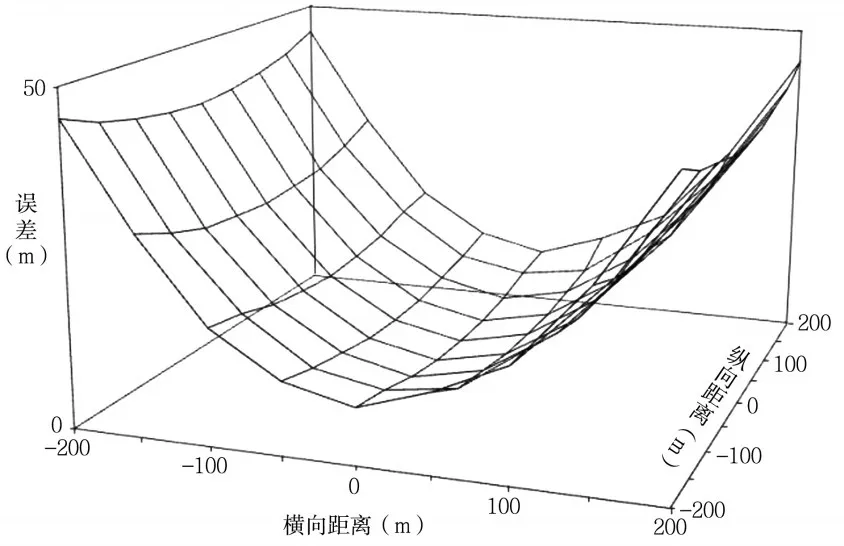
图2 水柱位置测量误差仿真结果
图2看出在靶船附近误差较小,误差随着距离的增加而增大,靶船艏艉线方向增加较小,横向误差很大,尤其是视场边缘误差接近50m。对测量误差产生原因进行分析[8-9],因为靶船只有15m宽,基准点横向距离较近。由于测量方法中没有考虑光轴中心位置误差以及靶船晃动等因素,因而实际测量误差可能会更大些。当靶船纵摇幅度
3 新标校测量方案
为解决横向测量误差过大问题,标校测量方法需要进行改进。改进后的新方法首先标定相机内参数,然后根据图像坐标和相机内参数确定无人机、靶船及水柱的空间几何关系,解立体几何计算出水柱偏差。相机标校分为两步进行,第一步在地面标定像面参数,第二步在相机状态固定后飞行过程中标定相机其它内参数。在无人机标校与执行水柱偏差测量过程中,要求相机焦距保持固定不变。
3.1 相机内参数标校方法
3.1.1 地面标校
地面标校目标是要计算出相机在x、y两个方向上像素间距大小dx、dy。相机变倍过程中,是相机光学系统改变变化,CCD像面是始终固定不变。dx、dy进行一次标校后,结果可以长期使用。
地面标校方法与2.1中的标定方法相同,要求基准点在相机视场中均匀分布,解算出相机内参数矩阵A,得到fx、fy等数据。根据定义可知,相机焦距f与fx、fy关系为:

式中,f为光学系统焦距;dx、dy分别为像素间隔距离。
CCD相机像素尺寸标称值为30μm,令dx=30μm,则:dy=fx/fy·dx。
为便于计算将dx用相机标称值固定下来,因为在相机成像关系中,dx不准,则f、dy等随之相应改变,最终造成像素平面与实际像平面之间有一个平移量,即不影响相机成像共线关系,也不影响最终计算结果。
3.1.2 飞行标校
飞行标校是标定相机的焦距f、光轴中心像素坐标(x0、y0)等数据,与地面标定结果dx、dy一起就得到完整的相机内参数矩阵。对于变倍光学系统,焦距和视轴中心在变倍过程中都会改变,因此需要在标校与水柱偏差测量的飞行过程保持焦距不变。
标校方法是:在靶船艏艉线两端各设置一个基准点,试验前准确测量两个基准点的实际距离,以保证标校精度。飞行标校先进行单画幅相机焦距计算,再进行多画验算。
(1)单画面相机焦距计算
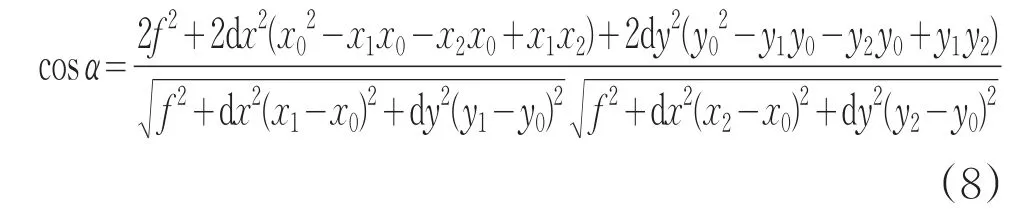
如图3所示,坐标系建立与2.1相同,P(Xw1,Yw1,Zw1)、Q(Xw2,Yw2,Zw2)是靶船上的两个基准点,PQ两点在像素平面内分别成像在U、V上,U、V两点像素坐标分别为(x1,y1)(x2,y2)。
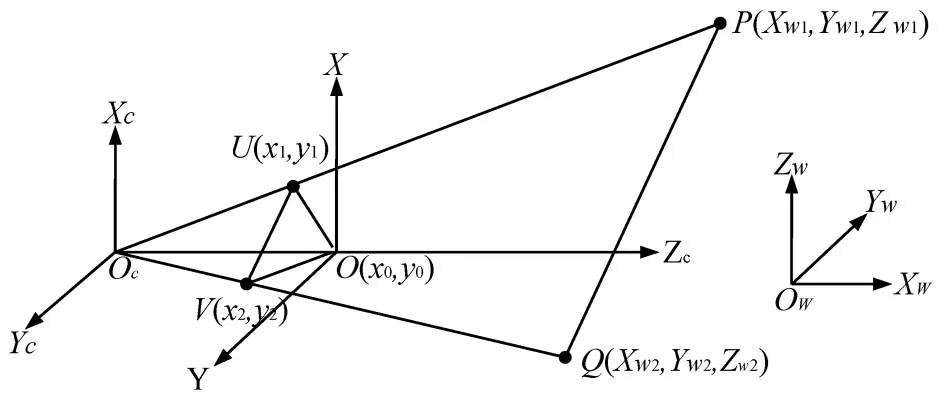
图3 相机成像物像关系图
用无人机位置、靶船位置和航向等数据计算两个基准点相对无人机的夹角α,则根据共线关系可知:

余弦定理可得:

式中,
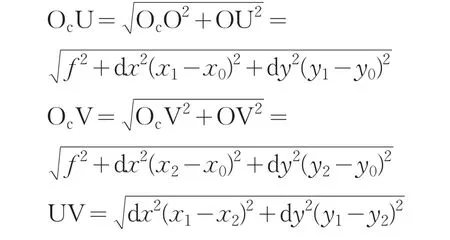
整理后得到:
设(x0,y0)为相机视场中心,代入各已知量(x0、y0、x1、y1、x2、y2、dx、dy、α)后,则公式(7)就整理成为一个关于f2的一元二次方程。解方程,去掉一个不合理值(如果暂时不能确定,就在下一步多画幅验算时选择),然后开平方得到相机焦距f。
(2)多画幅验算
在无人机飞行靶船摄录过程中,会得到多幅靶船图像,重得上述焦距计算步骤,就可以计算出一组焦距f,用f的均方差验证标校数据的准确性,如果均方差较大,说明(1)中假定视场中心为光轴中心不合适,用x0+Δx代替(x0,y0)中x0位置,重新计算f均方差,调整Δx大小,找出f均方值最小位置,确定x0,同样方法确定y0。用新的(x0,y0)重新计算焦距f。
3.2 水柱偏差计算
完成相机标定得到内参数矩阵,解空间几何就可以计算出水柱偏差,具体计算步骤如下:
首先从图像中识别出靶船中心A和水柱中心B,A、B两点的像素坐标(x1,y1)、(x2,y2),利用公式(6)分别计算出∠AOA′,∠BOB′,∠A′OB′三个角的角度值,A′像素坐标为(x1,y0),B′像素坐标为(x2,y0),O为相机焦点。
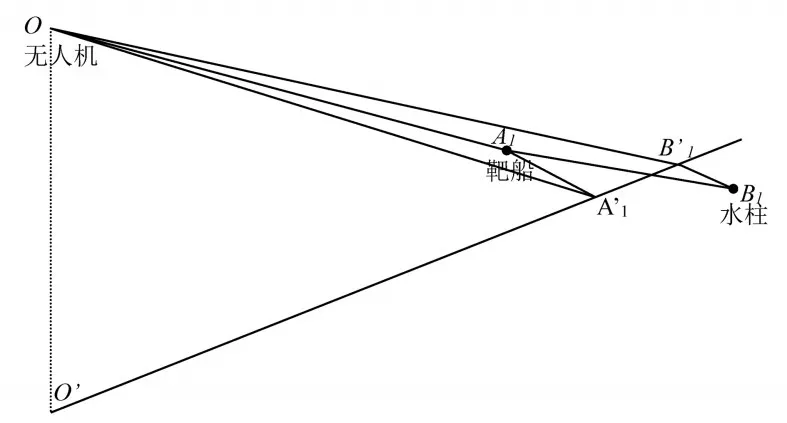
图4 相机靶船水柱位置图
靶船中心位置、水柱位置、相机焦点位置图如图4所示。相机焦点为O,靶船中心为A1,水柱位置为B1,靶船中心和水柱位置在视轴中心水平投影分别为A′1、B′1。
由相机成像共线关系得出:
利用靶船和无人机自带卫星定位系统实时位置信息计算出OA1和∠OA1O′,解空间三角形可分别计算出 A1A′1、A′1B′1、B′1B1的长度,得到水柱在相机坐标系下相对靶船的矢量偏差,最后进行坐标转换得到水柱在靶船坐标系下的偏差。
3.3 测量精度仿真分析
新标校测量方法将无人机摄录飞行与标校飞行分开,靶船在视场中的大小不受限制,仿真计算时设定靶船占视场的二分之一。假设无人机与靶船定位精度均为5m,靶船航向精度为0.1°。保持2.2中理想的投影矩阵的内参数不变,把飞机高度和距离靶船水平距离均减小到原来的三分之一,建立标校投影矩阵,给基准点位置和像素坐标加上随机误差,用有误差的标校图像对相机内参数进行标校。摄录测量投影矩阵与2.2相同,将靶船放在视场中心位置,选定水柱位置作为理论值,计算水柱像素坐标,增加随机误差后。用带误差的像素坐标计算出目标位置,与理论值进行比较得到测量误差。仿真计算结果表明,新方法测量的水柱偏差的误差在全视场范围内均小于4.7m,而且误差大小没有靶船航向相关性。
3.4 靶船晃动对测量精度的影响
2.2与3.3精度分析中都没有考虑靶船晃动因素,靶船晃动分横摇纵摇两个分量,一般横摇角度大,纵摇角度小。2.2中测量方案中,横摇纵摇对结果都有影响,当纵摇±3°时,经计算靶船晃动会造成最大10个像素的误差。新标校测量方法中,因为两个基准点分别在靶船艏艉处,只有纵摇对标校有影响,而且标校飞行时飞机位置没有限制,因此可以通过选择标校区段来减小晃动带来的误差。设飞机高1000m,以两基准点水平时成像间隔200像素,计算纵摇±3°的晃动给像素间隔带来的最大误差,计算结果如图5所示。由图中可以看出,当飞机在靶船正上方时,晃动带来的影响最小,飞机偏离靶船150m以内时,最大误差小于2像素,满足2.2与3.3精度分析条件。试验测量时,如遇靶船晃动较大情况,可以选取飞机在靶船上空的图像进行标校,就可避免晃动给测量带来误差。
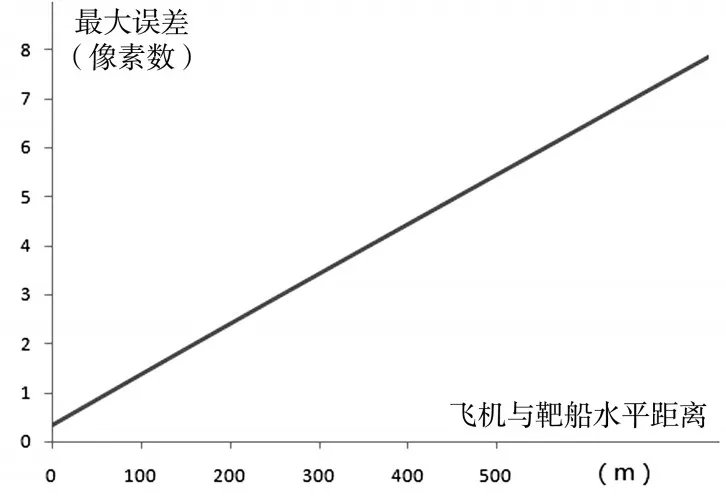
图5 飞机与靶船水平距离与晃动最大误差
4 结论
传统相机标校测量方法中,为保证测量的高精度,标校时基准点应均匀分布在视场中,这给测量应用带来一定局限性。基准点越集中,测量误差越大,某些特定应用时不能满足使用要求。新的标校测量方法将标校过程与目标测量过程分开,利用地面部分标校结果,在空中用两个基准点就完成相机内参数标定,再用相机内参数和像点坐标确定目标的空间几何关系,解算出目标位置。在无人机摄录水柱偏差测量上的成功应用表明,该方法克服了基准点受限的困难,保证了测量精度,对其它变焦电视系统的测量应用有一定借鉴作用。
参考文献
[1] 黄殿君,景文博,王晓曼,等.一种基于模板匹配的远场畸变校正方法[J].长春理工大学学报:自然科学版,2014,37(6):127-133.
[2] Zhang ZY.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22 (11) :1330-1334.
[3] 韩九强,胡怀中,张心曼,等.机器视觉技术及应用[M].北京:高等教育出版社,2009.
[4] 张广军.机器视觉[M].北京:科学出版社,2005.
[5] 郭方,王克逸,闫佩正,等.用于大视场目标定位的复眼系统标定[J].光学精密工程,2012,20(5):913-920.
[6] 牛海涛,赵勋杰.采用棋盘格模板的摄像机标定新方法[J].红外与激光工程,2011,40(1):133-137.
[7] 江晟,曲昭伟,胡宏宇,等.基于像素-角度映射的摄像机标定算法[J].哈尔滨工业大学学报,2012,44(8):130-135.
[8] 凡芳,王振伟,刘双印,等.面向视觉测量的相机标定误差分析[J].实验科学与技术,2016,14(6):14-16.
[9] 尹洪涛,刘成,李一兵,等.相机标定误差因素分析[J].信息通信,2012(1):28-30.
