分布式电动车转向电液复合制动控制
2018-05-24肖旭辉
肖旭辉
(长安大学汽车学院,陕西 西安 710064)
引言
分布式驱动电动汽车由于电机单独可控,可通过附加直接横摆力矩来提升车辆的稳定性能[1]。且电机具有响应速度快,控制精确快速的优点,但输出的力矩有限[2]。现在的电动汽车制动过程中,除了可以用传统的液压制动系统外,还可以通过电机的回馈制动在给车辆制动力的同时给车载电池充电[3]。
对于分布式驱动电动汽车制动力的分配,一方面要考虑回馈制动力与摩擦制动力之间的分配比例,尽可能提高能量回收效率;另一方面,由于考虑法规的限制和稳定性要求,汽车后轴应具有一定的制动强度,因此还须考虑前后轴制动力的分配,和各车轮的制动力分配[4]。
本文提出了一种基于稳定性加权系数的分层控制的电液制动力复合分配策略,使制动力矩分配既能满足稳定性需求又能使在当前工况下经济性能最大化,并通过仿真进行验证。
1 电液复合制动控制策略
本文采用分层控制结构,包括上层状态控制器和下层分配控制器,如图1所示。
1.1 横摆力矩控制
为了求得理想的横摆力矩,本文采用线性二自由度汽车模型作为求上层控制力的参考模型,如图2所示。
二自由度车辆动力学方程如下:

其中
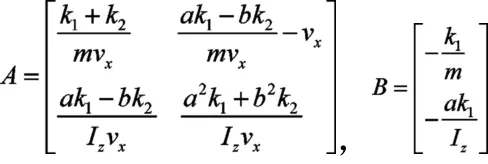
式中:△M为附加横摆力矩;Iz为汽车绕z轴转动惯量;ωr为横摆角速度;K1,K2分别为前后轮的侧偏刚度;m为整车质量;a,b分别为汽车质心至前后轴中心线的距离;vx,vy分别为质心速度在纵向和横向的分量。
令,可得稳态横摆角速度和前轮转角的关系:

考虑路面附着极限,可得理想横摆角速度为:

状态量ωr的系统非线性方程为:

式中Fyf和Fyr分别是前后轴的侧向力。
选择滑模面为:

其中,λ为和收敛速度有关的正常数,e=ωr-ωrd。
令可得等效控制率

令控制率u=ueq-k·sgn(s)
k为正常数,sgn(s)为符号函数。
由于控制率中含有符号函数,会使系统到达滑移面时发生抖振,为了消除抖振,本文引入边界层,即采用饱和函数替代符号函数,在边界层外采用正常的滑模控制,在边界层内采用连续状态的反馈控制[5]。令饱和函数为:

ψ为边界层厚度,本文取0.1。
综上可得到控制率u=ueq-k·sat(s)
1.2 前后轴制动力分配
为了满足安全性的需要,汽车的前后轴制动力分配区域必须包含在由I曲线、f曲线和ECE R13法规曲线三条曲线所确定的区间内,将汽车参数和路面附着系数代入三条曲线方程,根据制动强度直线即可求出与分配区域的上下边界的交点A、B,即可求出两点之间的线段距离,再乘以稳定性系数k即可求得在AB连线上所需的分配点k,所对应的横纵坐标即为前后轴制动力。

图3 前后轴制动力分配图
1.3 稳定性权重系数求解器
本文提出稳定性权重系数k,则经济性权重系数为1-k。对应系数的大小就表明了此时汽车是该以稳定性为主还是该以经济性为主。
以制动意图和路面附着系数作为稳定性加权系数模糊控制求解器的输入参数。
模糊求解器的求解规则为:制动减速度越大,k值越大,路面附着系数越大,k值越小。
制动减速度和路面附着系数的隶属度函数见下图。
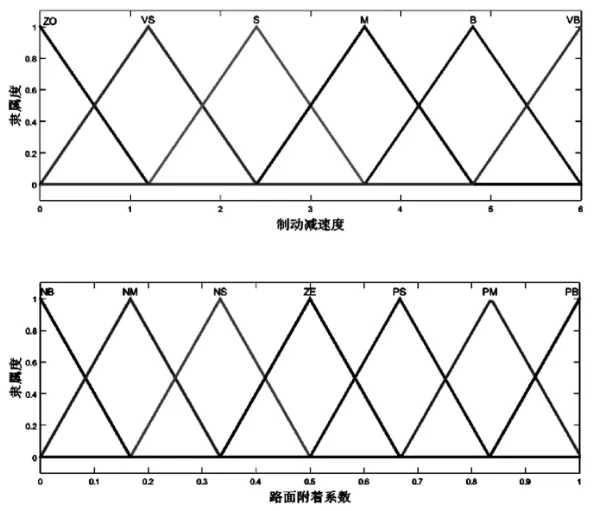
图4 制动减速度和路面附着系数隶属度函数图
1.4 各个车轮的制动力分配
系统目标函数应该结合稳定性和经济性才能保证汽车稳定行驶下又能保证汽车处于能效最高。
对于稳定性目标函数,以轮胎利用率最小为分配优化目标。

式中:轮胎的横向力FY和纵向力FX之间满足轮胎椭圆关系,通过魔术轮胎模型即可把两者解耦。ηi为车轮的路面附着利用率,车轮的路面附着利用率越低,表示车轮的剩余附着能力越高,意味着此车轮的稳定性越高。
汽车的经济性目标函数为各电机的效率之和。

Tf1、Tf2分别为左前轮和右前轮的电机制动转矩,Ireq为需求制动转矩,η(Tf1,n)、η(Tf2,n)为前轴左右电机效率,Je越大经济性越好。
本文引入之前求得的稳定性加权系数作为系统能效目标函数的加权系数。

电机的回馈制动转矩主要受转矩转速特性、电池状态、车速等参数的影响,其制动转矩表达式如下:
式中:Treg表示电机的回馈制动力矩,PN为电机额定功率,nb为电机基速,n为电机转速。
电机的回馈制动在较低的车速时,由于反电动势的迅速减少,制动能力会明显下降,为了保证行驶安全性,对电机设置一个最低安全转速要求,所以引入最低转速要求的电机回馈制动力矩为:

式中:

所以对于本文采取的前驱分布式驱动电动车,整个系统优化目标函数就可以整理为设计变量u=[FXfl,FXfr,FXrl,FXrr]T,求解maxJ。约束条件为:
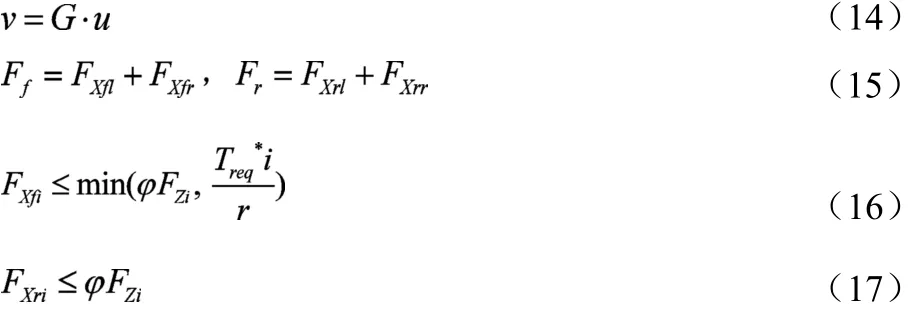
式中Ff和Fr分别为前后轴制动力,本文优先采用电机控制策略,在电池SOC达到饱和(SOC=0.8)之后再将制动力分配给液压系统,由于本次实验为少次实验,所以SOC的影响可以不考虑。
2 仿真与验证
本文仿真的实验工况选取 IOS3888-1∶1999(E)标准双移线工况,在仿真过程中令稳定性加权系数为0.6。
图6为实验仿真结果图,展示了横摆角速度变化曲线,由图可以看出,采用了本文分配算法的分布式驱动电动汽车能够很好的跟随理想的横摆角速度。
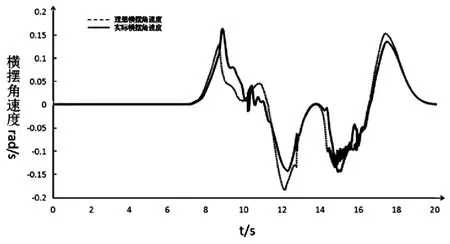
图5 横摆角速度变化曲线
图6为车辆的运动轨迹图,从图6a可以看出电液复合制动算法的车辆的轨迹和预设轨迹偏差很小,图6b中的无分配算法的传统控制车辆产生了较大的偏移,因此由图中的车辆路径可以看出,采用本文的控制分配的电动车能很好的跟随路径,在转弯过程中能够保证足够的安全性。

图6 车辆运动轨迹
3 结论
针对分布式驱动电动汽车,考虑在弯道制动过程中,既能保证车辆行驶稳定性又能兼顾制动能量回收,本文提出了一种带稳定性加权系数的电动车电液复合制动的控制方法。该控制方法,采用分层结构,分别设计了上层的状态控制器和下层的分配控制器。通过对所提出的控制方法进行仿真验证,可以看出,车辆在转向制动时,采用本文提供的控制方法可以有效提高车辆的稳定性,并且能充分发挥再生制动的优点,提高车辆的经济性和整车系统能效。
参考文献
[1] Xiong L, Yu Z, Wang Y, et al. Vehicle dynamics control of four inwheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics,2012, 50(6)∶831-846.
[2] de Castro R, Araújo R E, Tanelli M, et al. Torque blending and wheel slip control in EVs with in-wheel motors[J]. Vehicle System Dyna-mics, 2012, 50(sup1)∶ 71-94.
[3] HUANU Xiaoyu, WAND Junmin. Model predictive regenerative braking control for lightweight electric vehicles with in-wheel motors[J]. Journal of Automobile Engineering, 2012,226(9)∶ 1220- 1232.
[4] Ehsani M, Gao Y, Emadi A. Modern electric, hybrid electric, and fuel cell vehicles∶fundamentals,theory,and design[J].2009,volume 23(10)∶949-966(18).
[5] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用, 2007, 24(3)∶407-418.