智能定位自输送采果辅助机的设计
2018-05-22郝翠青胡尧
郝翠青*,胡尧
智能定位自输送采果辅助机的设计
郝翠青*,胡尧
(武汉理工大学,湖北武汉,430063)
设计了一种智能定位自输送采果辅助机,能够针对高处苹果进行智能化定位采摘,并通过快速收集来实现连续性采摘作业,考虑到采摘机构的各部件在运行时需要较高的协调性、准确性,以及与定位机构各部件搭配的合理性,本系统采用PLC作为控制元件,控制各运动机构的相应电机或元件,以此实现精确定位及协调工作。本论文从果农的实际采摘情况入手,设计出了操作简便的采果辅助机,对果农的采摘作业起到了有效协助作用。不仅提高了高处苹果的采摘效率,保障了苹果成品质量,同时也降低了工作人员的劳动强度和采摘成本。
采果辅助机;智能定位采摘;连续性作业
引言
苹果作为世界上仅次于柑桔、香蕉、葡萄之后的第四大水果,栽培地点遍及全球93 个国家和地区[1]。中国是苹果的起源地之一。在中国,苹果种植具有悠久的生产历史和得天独厚的地理环境、气候条件。2015年我国苹果种植面积和产量分别为227万公顷和4261万吨,分别占世界苹果栽培面积和产量的47%和51%。
大量的苹果种植也带来了大量的劳动力需求。苹果属于劳动密集型产业,生产优质苹果需要大量的人工投入[2]。调查发现,苹果采收过程中,采摘人员需事先携带篮筐,依照从下到上,从外向里的采摘顺序采摘苹果,采摘的苹果需及时放入篮筐,长在高处的苹果需用梯子采摘。然而,人工采摘存在耗时长、高处采摘移动受限、长期采摘易引起工作人员的不适感,不利于采摘人员的长期作业。
为解决上述果园人工采摘所面临的问题,提高苹果采摘效率、保证苹果完好度,为数量巨大的苹果种植商带来极高的经济效益,帮助渤海湾产区百姓在苹果采摘过程中最大程度地省时省力,降低成本,提高效率,项目组设计了该款苹果摘收机。
1 装置结构
智能定位自输送采果辅助机能够在果树一定高度范围内实现智能化定位采摘、连续性收集的一体化作业。本项目的机械机构的设计主要包含采摘机构和收集机构。

图1 智能定位自输送采果辅助机的整体设计图
1.1 采摘机构
采摘机构为了搭配控制系统方面实现智能定位采摘,整体分为三爪采摘器、改进步进电机和4自由度机械臂三个部分,并通过套筒等连接件完成三部分功能上的连接。
三爪采摘器由三个内表面贴有软胶材质的曲面爪、连接压块、复位弹簧、钢丝软线、弹簧固定套筒组成,其整体处于采摘机构的上方;改进步进电机由传统步进电机、防旋转滑块组成。三爪采摘器与改进步进电机内部通过钢丝软线进行连接,实现功能与效应的传递;外部通过固定套筒连接,对应上下部均有螺钉固定连接,套筒自身通过底端与机械臂的连接来实现位置的固定。采摘机构整体如图2所示。
机械臂是控制三爪手运动的主要执行机构,主要部件由基座、主臂、腕部和各个关节构成,如图3所示。包括腕部俯仰、腕部回转、主臂仰俯和主臂回转4种运动形式。
1.2 收集机构
整体样貌为两个方向相反的小圆台与大方台侧面的组合,主杆上端固定连接一个正圆台侧面的小缓冲篷;以该小缓冲篷的大圆面为自身的小顶面,在支撑架上固定连接一个倒方台侧面的大缓冲篷。该组合设计实现了对苹果的全平面初步缓冲接纳。在支撑架下端是一个缓冲网,其样式如同篮球框上的球网,起到对从大缓冲篷滚下再通过支撑架的苹果的进一步缓冲保护。另外,大缓冲篷与缓冲网之间的支撑架表面添加有软质缓冲材料,避免苹果直接落到支撑架上带来的损坏。收集机构整体效果图如图4所示。

图4 收集机构整体效果图
两个倾角均为缓冲篷对应母线与水平面之间所夹锐角。两个缓冲篷的倾角很大程度上影响着苹果的收集质量,太大与太小都不利于对苹果收集时的缓冲。本项目组考虑到实际情况,初步将小缓冲角1设计为25°,将大缓冲篷倾角2设计为10°。
2 整体控制
对于基于视觉的机械臂控制来说,机器人视觉是一个非常重要的组成部分。机器人只有在视觉的指引之下,才能获得目标的正确信息,从而控制机械臂完成指定的任务。视觉系统必须在标定的基础上,识别目标对象的位置和姿态[3]。由于苹果与周围环境的色调相差较大,所以基于HSV(hue-saturation—value)色彩空间来识别图像,用Matlab图像处理工具箱提供了大量数字图像处理的函数,可以实现各种分割算法[4]。
采摘过程中,利用HSV颜色切割识别出目标果实,然后将果实图像圆形化,利用最小二乘法近似求解果实圆心,以此目标物体的三维坐标。识别定位过程如图5所示。
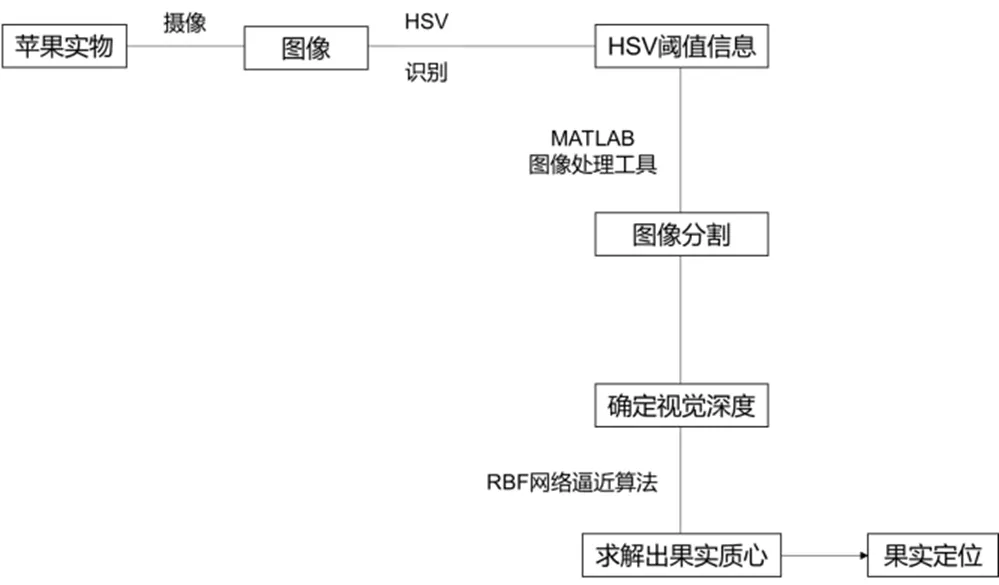
图5 苹果识别定位过程
本模型用蒙特卡洛(Monte Carlo)法得到机械臂的操作空间,机械臂的自由空间确定后,通过随机路标法,可得规划路径,应用逆向宽度优先搜索与Dijkstra算法,得到一个对路径进行安全性优化的数学模型,机械臂路径规划过程如图6所示。

图6 机械臂路径规划
根据双目摄像机所识别定位得到的位姿,由轨迹规划算法逆解机械臂运动学,计算出各舵机角度、角速度,将其换算成PLC控制的内部指令,然后发送到各舵机控制器,再通过驱动板驱动各舵机运动[5],如图7所示。

图7 机械臂控制运动过程
首先控机械手由点A移动到与点C处于同一高度的点B,由点B运动到点C,此规划方法先使手爪和目标处于同一高度,能大程度上减少机械臂运动过程中与枝叶不必要的碰撞。
3 应用前景
目前,苹果产业的高速发展与苹果采摘行业的自动化水平缓慢发展之间的矛盾,造成了如今大量的劳动力投入到苹果采摘的相关产业。这主要是采摘工作机械化水平不高,人们的劳动效率低下,劳动成本降不下来,生产效率提不上去造成的。机械装备市场中现存的林果业机具种类较少,品种单一,且机械性能和组合型结构简单,技术含量不高,不能满足日益增长的林果业发展需求,急待更新换代,以达到提升林果机械化技术的科技含量的目的。
本产品的设计初衷就是辅助人们的工作,将水果的采摘、放置功能结合在一起,提高人们的工作效率。本产品采用智能化识别定位技术帮助人们快速、准确地找到苹果的位置,再利用机械结构准确地较大范围内摘取苹果,最后利用收集装置自动收集果实,无需在采摘后再进行人工整理。另外,本产品相对便捷、易于移动,在很大程度上提高苹果采摘效率并且节省了劳动力。
4 结束语
为提高苹果采摘效率、保证苹果完好度,为数量巨大的苹果种植商带来极高的经济效益,设计了智能定位自输送采果辅助机,产品的特点主要体现在以下几点:
(1)智能定位自输送采果辅助机的采摘机构,整体分为三爪采摘器、改进步进电机两个部分,并通过套筒连接,两个部分灵活配合,为实现苹果的准确快速采摘奠定重要基础;
(2)采果辅助机的智能定位机构,;定位机构主要由机械臂以及其上的双目摄像头组成。机械臂是控制三抓手运动的主要执行机构,通过对机械臂运动的智能控制,实现了苹果的精准识别与定位;
(3)采摘机的收集机构,本项目组设计了一体化收集机构,通过缓冲网结构实现苹果的一次性多个收集,以保证苹果的连续性采摘。
[1] 范英. 中国苹果生产布局变迁研究[D]. 西北农林科技大学, 2010.
[2] 郭正. 黄土高原旱作苹果园地水分生产力和深层土壤干燥化效应模拟研究[D]. 西北农林科技大学, 2015.
[3] 李苏宁. 基于图像的机械臂视觉控制系统设计[D]. 哈尔滨工业大学, 2011.
[4] 包全磊. 基于HSV空间的彩色图像分割[J]. 软件导刊, 2010, 09(7): 171-172.
[5] 徐昱琳, 杨永焕, 李昕, 等. 基于双目视觉的服务机器人仿人机械臂控制[J]. 上海大学学报(自然科学版), 2012, 18(5): 506-512.
Design of Intelligent Positioning Self - conveying Picking Assist Machine
HAO Cuiqing*, HU Yao
(Wuhan University of Technology, Hubei Wuhan, 430063, China)
A smart positioning self-conveying pick-up assisting machine is designed. It can intelligently position and pick the apples at high altitude and realize the continuous picking operation by collecting quickly. Considering that the components of picking mechanism need to be higher during operation The coordination, accuracy, and the rationality of collocation with each component of the positioning mechanism. The system adopts PLC as a control component to control corresponding motors or components of each movement mechanism so as to achieve precise positioning and coordination. In this paper, we start with the actual picking situation of fruit growers, and design an easy-to-use fruit picking assisting machine, which plays an effective role in assisting the picking of fruit growers. Not only improve the picking efficiency of apple height, protect the quality of the finished apple, but also reduce the staff's labor intensity and picking costs.
picking fruit assisting machine; intelligent positioning picking; continuous working
10.19551/j.cnki.issn1672-9129.2018.01.048
TP393
A
1672-9129(2018)01-0120-03
郝翠青, 胡尧. 智能定位自输送采果辅助机的设计[J]. 数码设计, 2018, 7(1): 120-122.
HAO Cuiqing, HU Yao. Design of Intelligent Positioning Self - conveying Picking Assist Machine[J]. Peak Data Science, 2018, 7(1): 120-122.
2017-11-23;
2017-12-27。
陈志民(1975-),男,福建厦门,高级工程师,工程学士,研究方向:电力系统及自动化。E-mail:2474958762@qq.com
