开关磁阻电机和路面对电动汽车振动影响的分析∗
2018-05-22王培德
李 杰,高 雄,王培德
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
前言
近年来,能源和环保带来的双重压力,使电动汽车成为汽车工业研发的焦点。作为电动汽车的一种形式,轮毂电机驱动电动汽车将驱动电机嵌入到轮毂内,是布置结构最简单和传动效率最高的电动汽车,受到广泛关注[1-6]。
开关磁阻电机是20世纪80年代遵循磁阻最小原理发展起来的一种新型电机,具有结构简单、成本低、启动性好、效率高、调速范围宽等优点,十分适合在电动汽车上应用。然而,开关磁阻电机缺点是转矩波动引起的振动和噪声较大[7-9]。
当开关磁阻电机嵌入到轮毂内,电机产生的激励将时刻作用在车轮上,直接影响电动汽车的舒适性和安全性。因此,研究开关磁阻电机的激励,是促进其在电动汽车上广泛应用的关键问题之一。
以往研究多从电机设计及其控制方面考虑开关磁阻电机振动问题,仅有少量研究从电机应用环境考虑开关磁阻电机振动问题。为抑制开关磁阻电机缺点,充分发挥其优点,已经针对开关磁阻电机开展了激励分析和对轮毂电机驱动电动汽车振动影响的研究[10-12],这些研究是对开关磁阻电机在汽车应用环境的尝试,具有基础性。但是,这些研究对电机激励的分析过于复杂,不便于应用;仅考虑电机单相转子多相过程的电机激励,没有考虑电机多相转子多相过程的实际过程,存在问题;仅考虑静止不动时电机对汽车振动的影响,没有考虑行驶时电机和路面作为双激励对汽车振动的影响,具有局限性。
为了克服上述问题,在前人的研究工作基础上,采用线性假设以易于理解与应用的方式描述开关磁阻电机激励,通过滤波白噪声描述路面激励,基于1/4汽车2自由度系统建立轮毂电机驱动电动汽车振动模型,确定对应的振动性能指标,以电机和路面作为双激励分析它们及其组合对汽车振动的影响,为开关磁阻电机驱动电动汽车振动性能的改善、优化和控制研究奠定基础。
1 开关磁阻电机激励描述
1.1 电机组成和线性假设
开关磁阻电机由转子、定子、绕组和开关电路部分组成。
典型四相8/6极开关磁阻电机的基本结构,如图1所示,4组开关电路仅画出1组。其中,定子外圆周均布8个凸极,每个凸极上安装有绕组,构成单极绕组,定子外圆周相对的两个单极绕组串联,构成单相绕组,又称绕组线圈;转子内圆周均布6个凸极,每个凸极称为单相转子。
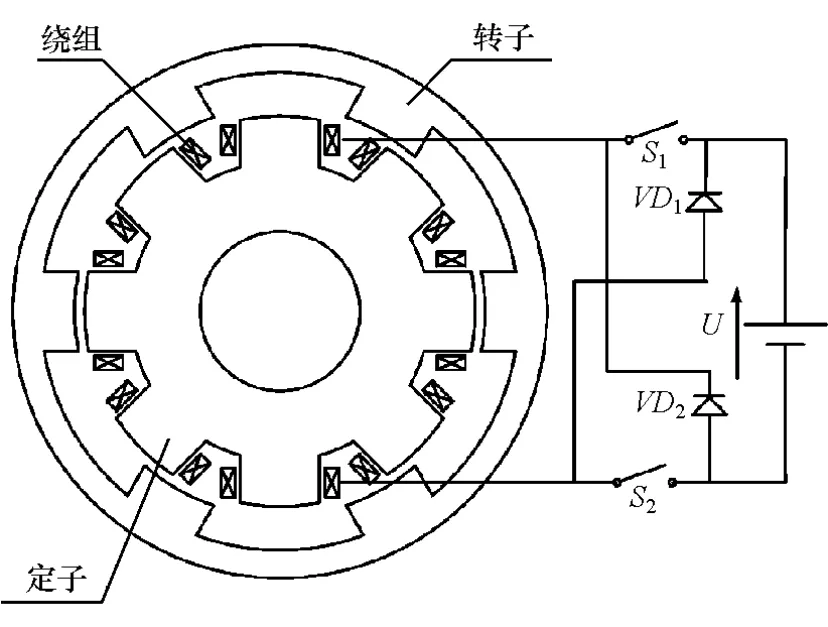
图1 四相8/6极电机典型结构
当单相转子在一定角度向单相绕组靠近时,电流在绕组线圈通过,磁通沿着磁阻最小的路径闭合,转子与定子之间产生电磁作用过程,称为单相转子单相过程,简称单相过程;单相转子与所有单相绕组电磁作用的过程,称为单相转子多相过程;所有单相转子与所有单相绕组电磁作用的过程,称为多相转子多相过程,它是电机激励形成的完整过程。
为描述开关磁阻电机的运动过程,引入如下线性假设[10-12]:
(1)忽略功率损耗、磁通边缘效应和磁路非线性;
(2)相变换瞬时完成;
(3)电机恒速运行,电流为常数。
1.2 单相过程电机激励与转子转角关系
单相过程中,电机完成一个转子与一个定子的电磁作用过程,产生的电机激励为单相转子单相过程的切向力和径向力。
在线性假设下,可以建立电机单相转子单相过程切向力和径向力的表示[10-12]。
切向力Fn(θ)和径向力Fr(θ)分别为
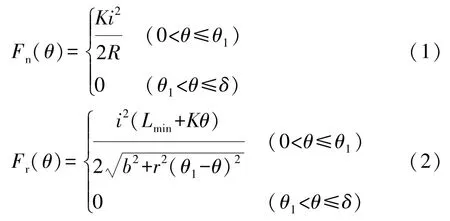
式中:θ为转子转角;K为电感上升斜率;i为恒定的额定电流;θ1为转子与定子完全重叠位置;δ为单相过程作用范围;Lmin为最小电感;R为转子内半径;r为定子外半径;b为转子与定子间的最小气隙。
1.3 单相过程电机激励与时间的关系
采用转子转角作为自变量进行后续分析,并不方便。为此,引入时间作为自变量。于是,单相过程的θ,θ1和δ对应的时间分别为

式中:ω为电机旋转速度。
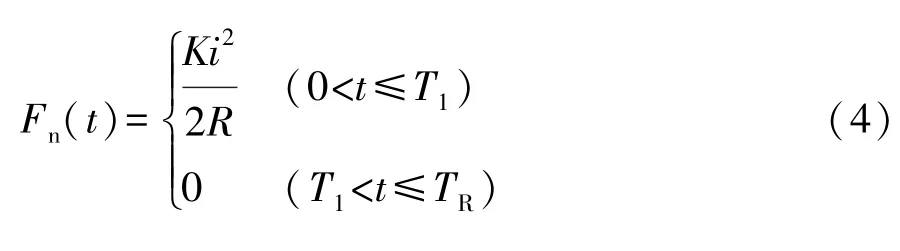
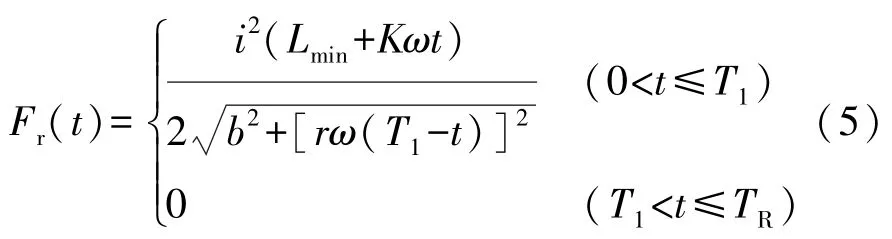
对应式(3),单相过程电机激励与时间的关系为
1.4 单相转子多相过程电机激励与时间的关系
引入时间作为自变量后,单相过程本质上就是单相转子在一个周期TR的运行过程,而单相转子多相过程,就是单转子多个周期的运行过程。
考虑周期后,单相转子多相过程的电机激励与时间的关系为

1.5 多相转子多相过程电机激励与时间的关系
为分析方便,设基准为水平轴,将四相8/6极开关磁阻电机初始时刻靠近水平轴的定子单级绕组标识为A极,按照逆时针方向将其后三极绕组分别标识为B,C和D极,与A,B,C和D极相对的单级绕组分别标识为A′,B′,C′,D′极,如图 2 所示。
设A极的初相位角为φA,则各级绕组的初相位角为φi,如表1所示。
初始时刻,设与A极作用的转子为a相。按逆时针方向,其后两相转子分别为b和c相,与a,b,c相对的转子分别为a′,b′,c′相。
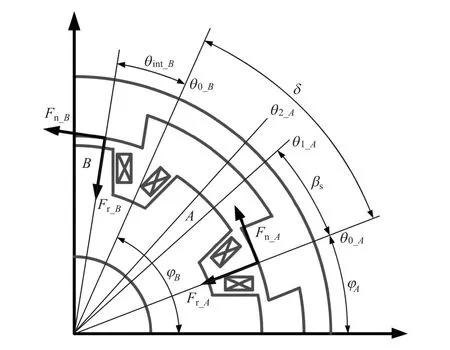
图2 初始时刻的电机激励(仅画出电机的1/4)
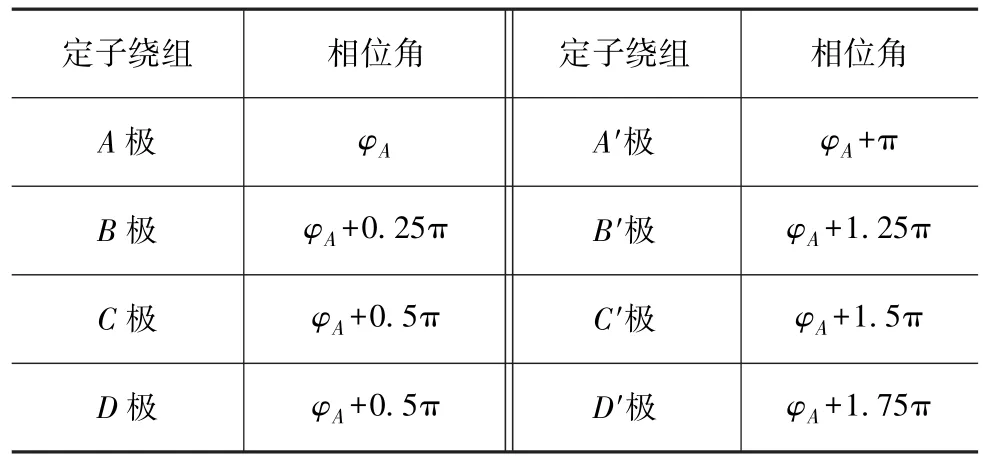
表1 四相8/6电机各级定子绕组的相位角
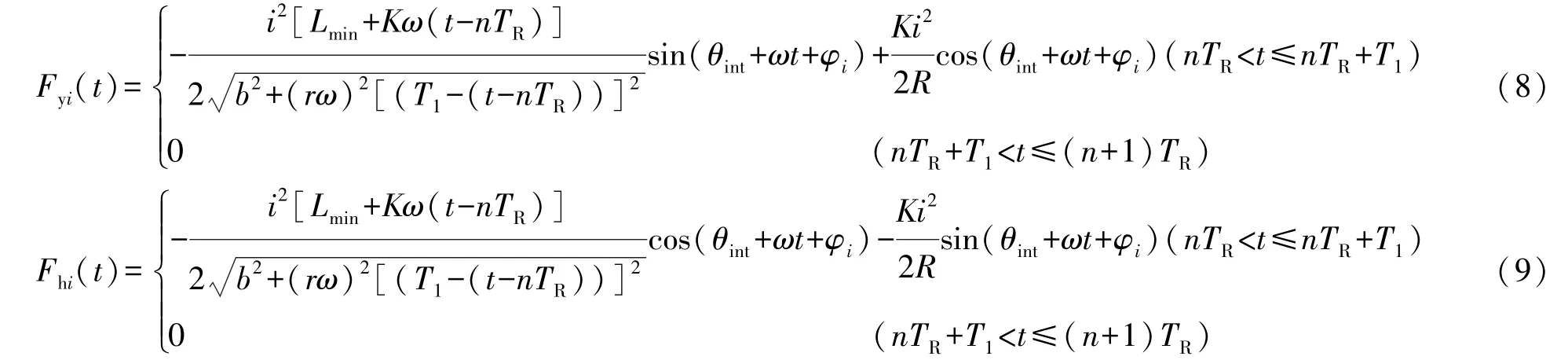
在确定各定子绕组对应的初相位角后,需要确定各相转子在初始时刻的位置θint。初始时刻,各相转子的初始位置,如表2所示。
由于初始时刻不同转子的初值位置θint不同,某一时刻各相转子转角θ=θint+ωt。因此,考虑定子单级绕组和转子的初始位置后,垂向和水平的电机激励表示为
对整体电机而言,某一时刻垂向和水平的电机整体激励表示为

1.6 理想和偏心情况转子与定子间的最小气隙
理想情况是指定子和转子的圆心重合,不存在偏心的情况。
理想情况下,转子与定子间的最小气隙bi是恒定值,即

在实际中,由于加工、制造和装配,转子与定子之间会存在一定的偏心,即定子和转子圆心不重合。
由于电机径向力较大,且垂向偏心导致的径向力不平衡力较大[13]。因此,为便于研究,选择最小气隙位置不变和垂向偏心的情况研究偏心对电机激励的影响。
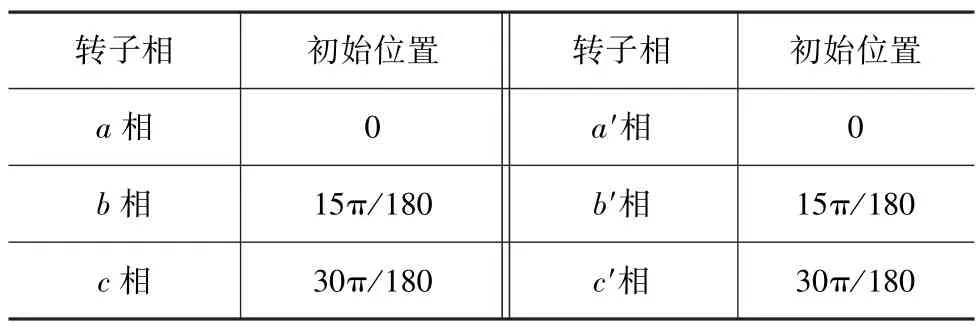
表2 四相8/6电机各相转子初始位置
设偏心方向为垂向,偏心量为e,经推导偏心时最小气隙b为
在式(13)中,如果让e=0,则b=bic,由此说明式(13)可以用于表示理想和偏心两种情况的最小气隙。
将各极定子的初始位置代入上式,就可以得到四相8/6极开关磁阻电机各极定子与转子间的最小气隙。将考虑偏心后的各极绕组与转子间最小气隙代入式(8)~式(11)中,就得到电机整体激励。
2 路面激励的描述
2.1 路面激励的功率谱密度表示
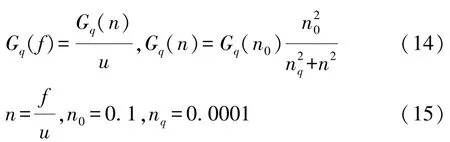
对于路面激励,基于路面功率谱密度的表示方法,考虑下截止频率nq的路面激励功率谱密度Gq(f)[14]为
式中:f为路面激励的时间频率;u为车速;n,n0分别为空间频率和参考空间频率;Gq(n0)为路面不平度系数,由标准给定[15];nq为下截止空间频率。
2.2 路面激励的滤波白噪声表示
滤波白噪声方法是将理想单位白噪声作为输入,经1阶滤波器变化后转化成路面激励作为输出的方法。
基于滤波白噪声,式(14)对应的路面激励的时域描述为[16]

式中:q为路面激励;w(t)为均值是0和功率谱密度是1的理想单位白噪声。
3 电动汽车振动模型
3.1 1/4汽车2自由度系统
1/4汽车2自由度系统是由簧载质量(车身)与非簧载质量(车轮)构成的常用研究汽车振动的模型[15]。
1/4汽车2自由度系统由质量为m2的车身、质量为m1的车轮、刚度为k的悬架、阻尼为c的减振器和刚度为kt的轮胎组成,z2为车身垂直位移,z1为车轮垂直位移,q为路面激励,FV为垂向的电机整体激励,如图3所示。
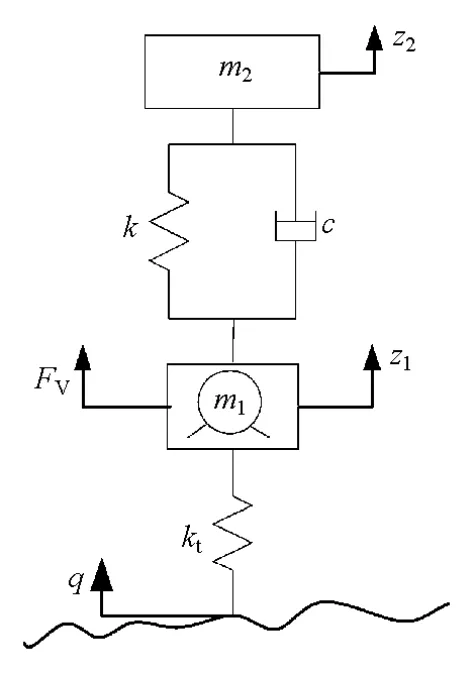
图3 1/4汽车2自由度系统力学模型
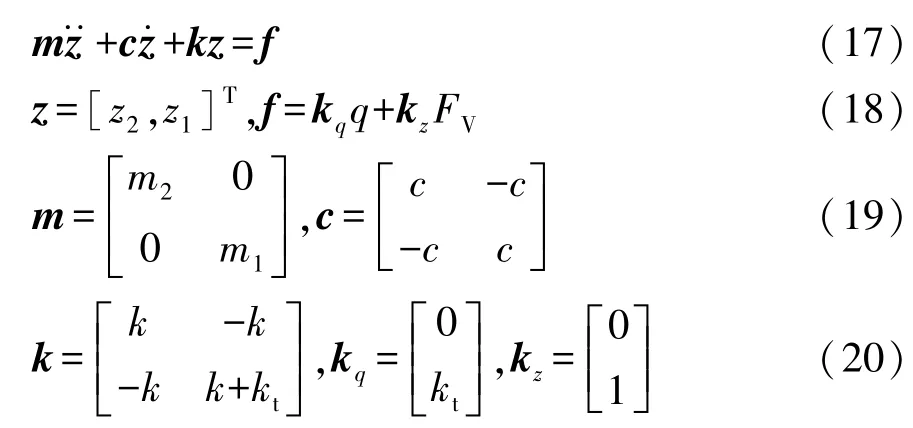
描述1/4汽车2自由度系统的运动方程为
3.2 振动性能指标及其确定
1/4汽车2自由度系统的振动响应量,由车身加速度悬架动挠度fd和车轮相对动载Fd/G组成。
轮毂引入电机后,会对电机造成一定的影响。分析轮毂电机驱动电动汽车振动性能时,除了上述的3个振动响应量外,本文中补充车轮加速度作为振动响应量。
fd和Fd/G的表示为

由式(10)和式(16)确定电机激励FV和路面激励q,将其代入式(18)可以得到激励向量f;对式(17)采用时域积分方法,可以得到各个时刻的位移z,速度和加速度由此可以得到车身加速度和车轮加速度再由式(21)和式(22)可以得到悬架动挠度fd和车轮相对动载Fd/G。
求得每个振动响应量后,采用每个量的均方根值作为振动性能指标。
4 电动汽车振动性能分析
4.1 分析方案
基于前面的理论分析,采用Matlab/Simulink开发了基于1/4汽车2自由度系统的开关磁阻电机驱动电动汽车振动性能仿真软件。
选择采用四相8/6级开关磁阻电机的某电动汽车作为研究对象,在转子和定子没有偏心的理想情况和垂向偏心率10%情况下对轮毂电机驱动汽车振动性能进行仿真。
首先,对垂向电机整体激励进行仿真。然后,对电动汽车振动性能进行仿真。仿真条件为B级路面,车速以5km/h的增量从5km/h变化到80km/h,再现城市的普通和高架道路行驶工况。
4.2 理想和垂向偏心情况下垂向电机整体激励
车速为20km/h时,转子和定子无偏心的理想情况和垂向偏心率10%情况下的垂向电机整体激励,如图4所示。

图4 理想和偏心两种情况的垂向整体电机激励
由图4可以看出,在理想情况下,垂向的电机整体激励为零,说明电机的转子和定子之间没有偏心的理想情况电机不产生垂向整体激励,验证了电机激励模型的正确性[13];在垂向偏心率为10%的情况下,垂向电机整体激励呈周期性变化;由于电机切向力小于径向力,同时,由于电机垂向向上偏心,因此,垂向电机整体激励方向始终为向下。
4.3 电机和路面激励对振动性能的影响
理想情况和偏心率10%情况下,轮毂电机驱动电动汽车振动性能指标的仿真结果,如图5所示。
由图5可以看出:
(1)电机激励对电动汽车车身加速度的影响主要体现在车速较低时,当车速高于30km/h后,电机激励对车身加速度影响很小;在车速10km/h附近时,电机激励对车身加速度影响最大,相比于没有电机激励的情况,车身加速度增加了0.923 0m/s2;
(2)电机激励对电动汽车悬架动挠度的影响主要在车速10km/h时,由电机激励引起的悬架动挠度相比于没有电机激励的情况增加了2.483 6mm;
(3)电机激励对轮胎动载荷的影响十分明显,尤其是当车速较低时,因为电机激励导致的轮胎动载荷增加了708.5N;5~80km/h车速区间,电机激励导致轮胎动载荷增加量的平均值为312N;
(4)电机激励对车轮加速度的影响十分明显,除车速为10km/h时车轮加速度增加量达到19.774 3m/s2之外,在常用车速60km/h下,由电机激励引起的车轮加速度相比于没有电机激励的情况,增加了10.345 3m/s2。
电机出现偏心情况,会产生振动性能评价指标恶化的问题。通过车辆设计或电机设计的改变,可以减小该问题。选择从车辆设计改变处理这一问题,基于对悬架参数的优化设计使振动性能评价指标降低。选择悬架的刚度和阻尼为优化设计变量,其悬架偏频、阻尼系数、动挠度界限值和车轮相对动载应满足汽车悬架设计要求的约束,并使所有振动性能评价指标最小为多目标优化函数。由图5可以看出,优化后的振动性能指标均有不同程度下降,尤其是在低速情况下。当然,优化还没有达到单独路面激励的程度,由此说明,与传统汽车相比,开关磁阻电机的引入使电动汽车的振动性能面临新的问题,有必要对开关磁阻电机驱动电动汽车甚至所有轮毂电机驱动电动汽车的振动性能开展更为全面的研究和分析,以便为电动汽车的振动性能改善、优化和控制奠定坚实的基础。
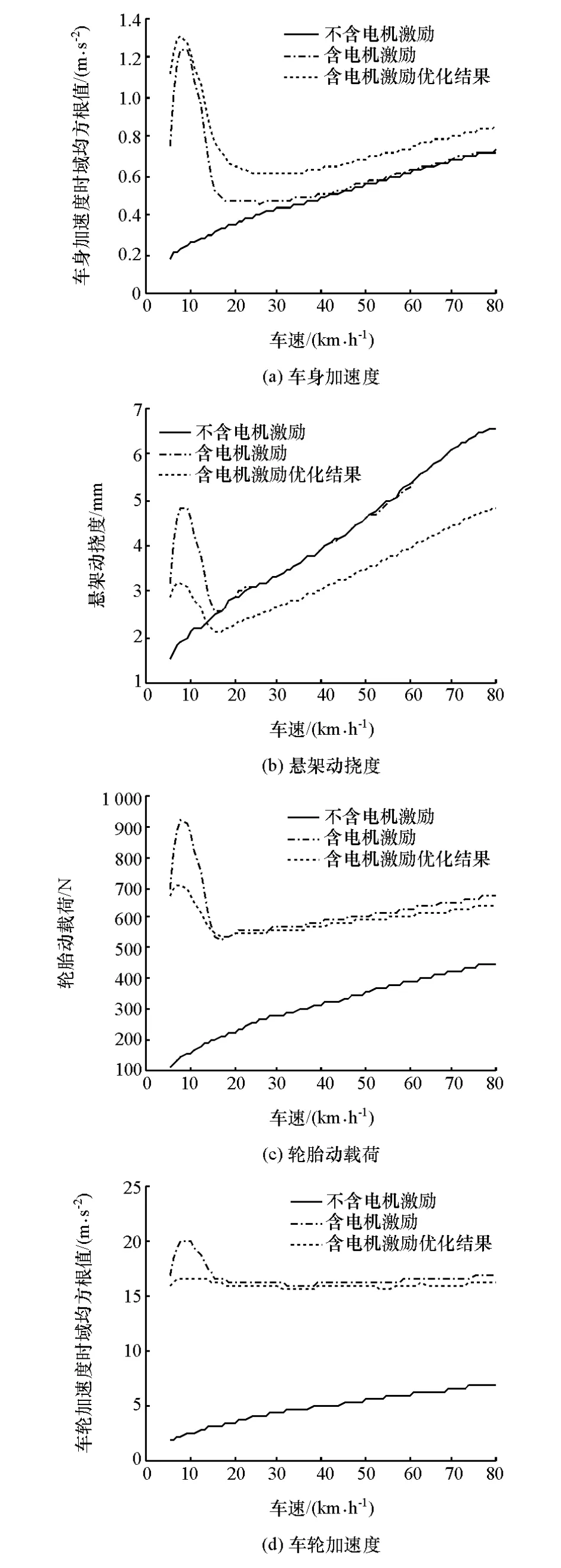
图5 理想和偏心两种情况对电动汽车振动性能的影响
5 结论
针对开关磁阻电机驱动电动汽车振动问题,以易于理解与应用的方式,建立了开关磁阻电机激励的模型和路面滤波白噪声的模型,考虑了行驶时电机和路面两种激励,确定了开关磁阻电机驱动电动汽车1/4汽车2自由度系统振动模型和性能指标,通过仿真分析了电机和路面对开关磁阻电机驱动电动汽车振动的影响。
研究结果表明,在开关磁阻电机转子和定子没有偏心的理想情况下,不存在电机激励,开关磁阻电机驱动电动汽车只受到路面激励的作用;在开关磁阻电机有因制造、装配和使用导致的转子和定子偏心的情况下,存在电机激励,开关磁阻电机驱动电动汽车受到路面和电机联合激励的作用;路面和电机联合激励下,低速范围(5~20km/h)内的车身加速度和悬架动挠度,整个速度范围内的车轮动载荷和车轮加速度,明显高于路面单独激励下的对应量。
参考文献
[1]MURATA S.Innovation by in-wheel-motor drive unit[J].Vehicle System Dynamics,2012,50(6):807-830.
[2]ETSUO KATSUYAMA.Decoupled 3D moment control using inwheel motors[J].Vehicle System Dynamics,2013,51(1):18-31.
[3]谭迪,罗玉涛,叶志伟.内置悬置轮毂电机驱动系统参数灵敏度分析[J].华南理工大学学报(自然科学版),2013,41(5):131-138.
[4]童炜,侯之超.轮毂驱动电动汽车垂向特性与电机振动分析[J].汽车工程,2014,36(4):398-403.
[5]宋传学,肖峰,刘思含,等.基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测[J].吉林大学学报(工学版),2016,46(2):333-339.
[6]靳彪,张欣,彭之川,等.四轮轮毂电机驱动电动汽车建模与仿真[J].中国公路学报,2016,29(47):138-144.
[7]MAHAVIR SINGH NARUJA, CHAUHAN D S, SINGH S N.Switched reluctance motor drive system R&D status[J].MIT International Journal of Electrical and Instrumentation Engineering,2012,2(2):82-87.
[8]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[9]李俊卿.开关磁阻电机发展综述[J].华北电力大学学报,2002,29(1):1-5.
[10]薛玉春,张义民,贺向东.电动汽车的开关磁阻电动机驱动及其系统激振仿真[J].中国机械工程,2007,18(11):1378-1382.
[11]张义民,薛玉春,贺向东,等.基于开关磁阻电机驱动系统的电动汽车振动研究[J].汽车工程,2007,29(1):46-49.
[12]薛玉春,张义民,贺向东.电动汽车开关磁阻电机的激振力研究[J].农业机械学报,2008,39(2):25-29.
[13]李以农,孙伟,王艳阳.电动汽车开关磁阻轮毂电机振动噪声负效应及控制[C].中国汽车工程学会年会论文集,2014:1363-1366.
[14]朱延蕾.多轴重型特种汽车在不同路面下振动性能的仿真与评价[D].长春:吉林大学,2014.
[15]余志生.汽车理论[M].北京:机械工业出版社,2010.
[16]赵旗,王维,李杰,等.基于滤波白噪声的汽车平顺性时域建模和仿真[J].科学技术与工程,2016,16(27):283-287.
