机械式可展开气动减速技术跨亚声速段二次展开
2018-05-17侯向阳张红英张鹏桂蜀旺侯砚泽
侯向阳 张红英 张鹏 桂蜀旺 侯砚泽
机械式可展开气动减速技术跨亚声速段二次展开
侯向阳1,2张红英1张鹏2桂蜀旺1侯砚泽2
(1 南京航空航天大学飞行器先进设计技术国防重点学科实验室,南京 210016)(2 中国空间技术研究院载人航天总体部,北京 100094)
文章提出了采用沿辐条方向增加伸缩杆、柔性承力罩及弹性单元的方式实现机械式可展开气动减速技术二次展开的结构方案,并针对二次展开气动外形分别从弹道轨道、升阻比及俯仰力矩系数等方面开展了跨亚声速段减速效果、升阻特性及静稳定性研究。研究显示:二次展开状态的减速效果明显优于一次展开状态;二次展开状态的升阻比随攻角及马赫数变化规律与一次展开状态一致;小攻角范围内两状态的升阻比变化不大,大攻角范围内两状态的升阻比差异明显;二次展开状态在跨亚声速段存在唯一的静稳定点,且该点的静稳定性强于一次展开状态。研究表明:机械式可展开气动减速技术采用二次展开方案能够实现在跨亚声速段继续减速和姿态稳定的目的,二次展开方案在机械式可展开气动减速技术上的应用具备工程可行性。文章为机械式可展开气动减速技术二次展开方案工程化实施奠定了基础。
机械式可展开 气动减速技术 二次展开减速效果 升阻比 静稳定性 航天器进入与再入
0 引言
随着航天事业的高速发展,一种新型的可展开气动减速技术以其受火箭包络约束小、减速效果好、过载及热流密度低、拓展性强等优势已被应用到地外星体进入和地球再入返回领域。这种可展开气动减速技术按照展开形式及驱动方式分为充气式[1-3]和机械式[4-8]两类,其应用模式大致有两种[9-14]:一种是在高超声速及超声速段利用一次展开形成的柔性气动面减速、防热,当速度减至气动热影响较小的跨/亚声数段时接近于匀速,再利用减速伞或反推发动机进行二次减速及姿态稳定性维持。这种模式的一次展开面积相对较小,高速段气动面构型稳定性控制及柔性防热材料研制易实现,但需配置减速伞或推进系统,增加了系统复杂程度、成本及质量;另一种是利用一次展开形成的面积“足够大”的柔性气动面来实现全流域减速及高速段防热。这种模式的系统相对简单,但因为展开面积较大,增加了高速段柔性气动面构型稳定性控制难度及柔性防热材料研制难度[13]。
为克服以上两种模式的缺点,国内外学者提出了“在高超声速及超声速段采用一次展开形成的气动面进行减速、防热;在跨/亚声数段采用气动面二次展开继续减速”的应用新模式,但目前该模式的研究与应用主要聚焦在充气式上[1-3,13,14],对于机械式二次展开研究尚无公开报道。
因此,为拓宽可展开气动减速技术二次展开研究的技术途径,探索二次展开在机械式上应用的可行性,本文提出一种机械式可展开气动减速技术二次展开结构设计方案,并针对该方案气动外形,分别从弹道轨道、升阻比及俯仰力矩系数等方面开展跨亚声速段减速效果、升阻特性及静稳定性初步研究。本文研究内容及结论为机械式可展开气动减速技术二次展开后续深入研究及工程化实施奠定了基础。
1 结构设计方案
机械式可展开气动减速技术一次展开形成的气动面主要由主体、刚性防热头锥、连接杆、半刚性防热层及辐条组成,如图1(a)所示。实现二次展开最直接的设计方案是沿辐条方向增加伸缩杆及柔性承力罩,如图1(b)所示。具体如下:
将辐条设计成一个空腔结构,内部安装弹性单元和切割器,伸缩杆“插入”辐条空腔内锁紧固定;柔性承力罩具有极强的可折叠性,二次展开前压缩在半刚性防热层边缘,其一端与半刚性防热层缝合,另两侧连接伸缩杆。当机械式可展开气动减速系统速度减小至跨亚声速时,切割器切断伸缩杆与辐条空腔的连接,伸缩杆在弹性单元的驱动作用下沿辐条方向伸出,从而带动柔性承力罩展开,实现机械式可展开气动减速技术二次展开,如图1(c)所示。二次展开后的柔性承力罩与一次展开的半刚性防热层共同形成一个面积“足够大”的新气动面完成跨亚声速段的继续减速及姿态稳定。
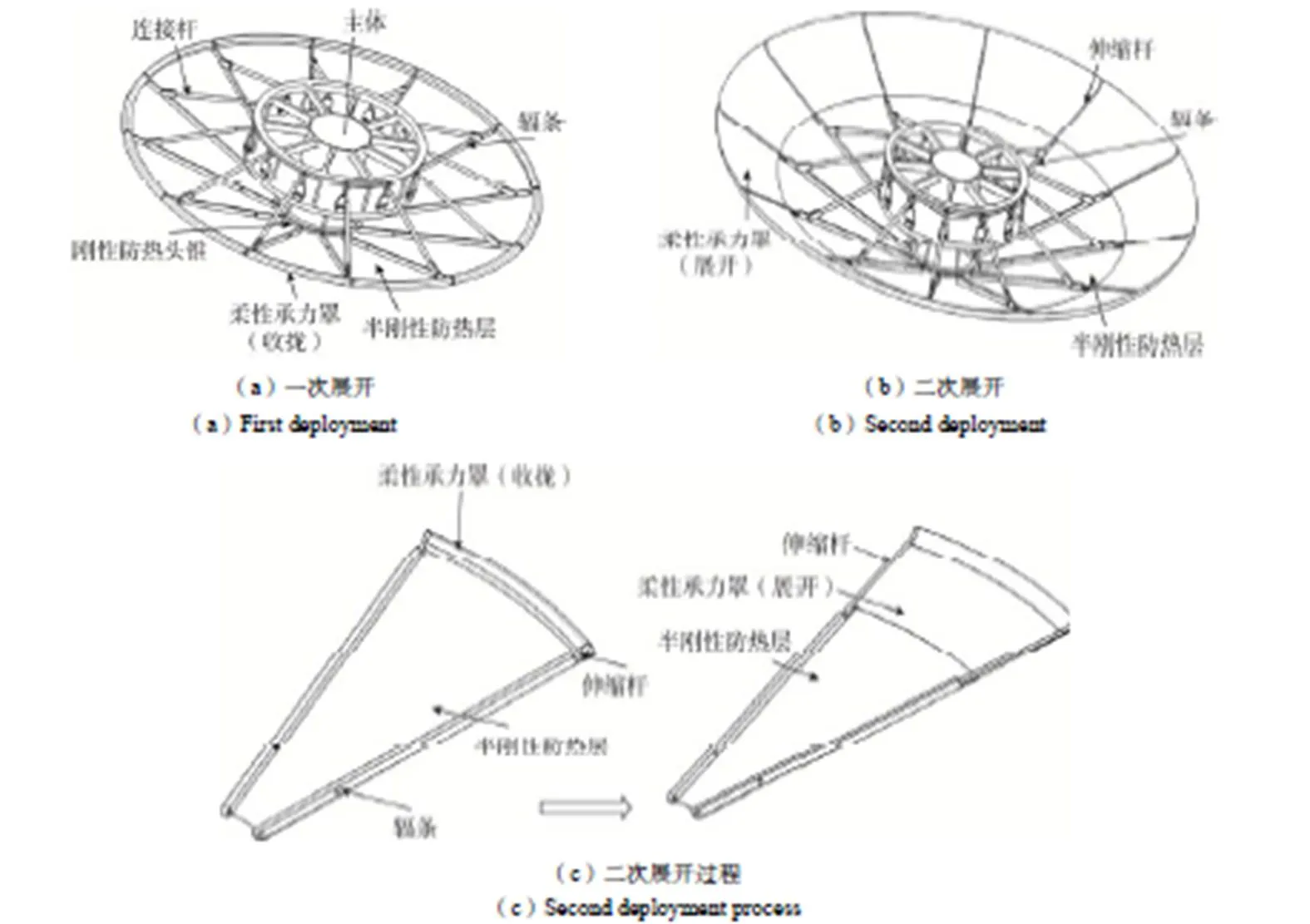
图1 二次展开结构方案
机械式可展开气动减速技术一次展开后的气动外形为球锥构型,系统质量为球头半径为、气动面直径为1、半锥角为、刚性防热头锥直径为、向高度为、气动面高度为1,质心位于对称轴上且高度为cg,如图2(a)所示;二次展开后的新气动外形仍为球锥构型,除新气动面直径为2=1.421,新气动面高度为2=1.421外,其他参数不变,如图2(b)所示。
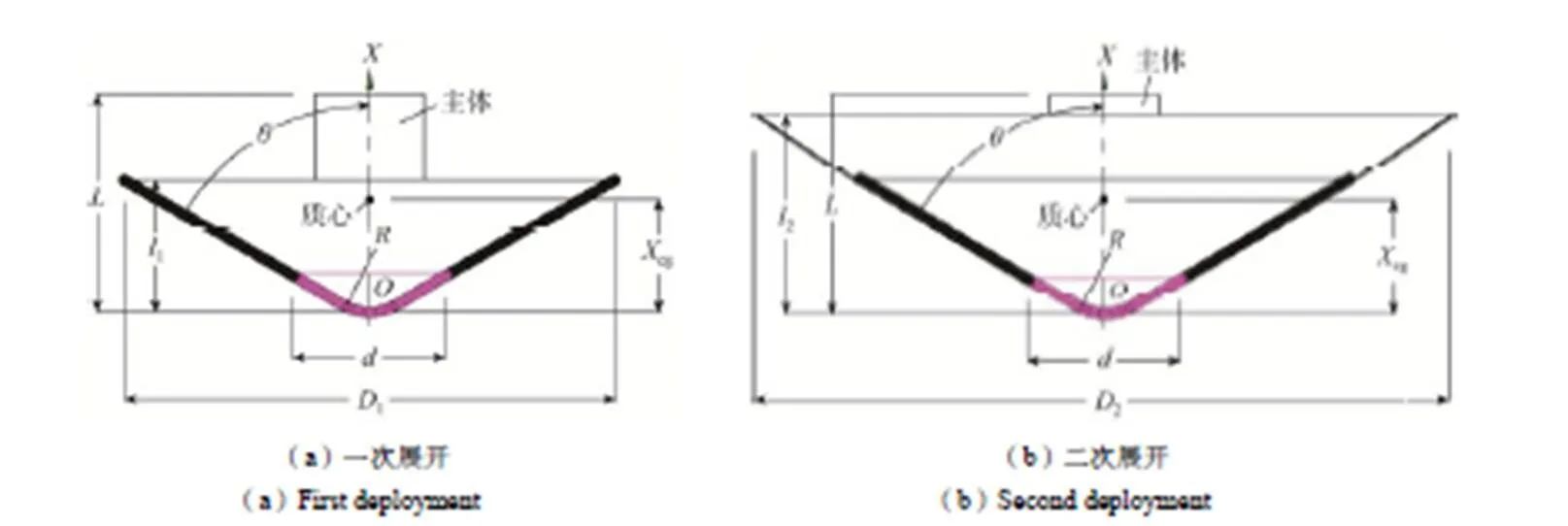
图2 机械式可展开气动减速技术气动面示意
2 减速效果分析
为便于比较和描述,本文采用两个状态进行对比分析,即:状态I为跨亚声速段仍采用(高)超声速段一次展开形成的气动面进行继续减速,状态II为跨亚声速段采用在状态I的基础上经二次展开形成的气动面进行减速,其中一次展开的气动外形及相关参数如图2(a)所示,二次展开的气动外形及相关参数如图2(b)所示。
图3为两个状态在攻角为0°状态下跨亚声速段弹道轨道计算曲线,从计算结果看出:在同一高度或同一再入时间下,状态II(二次展开)的再入速度明显小于状态I(一次展开)的再入速度。这主要是气动面增大后,气动阻力随之增加的缘故。
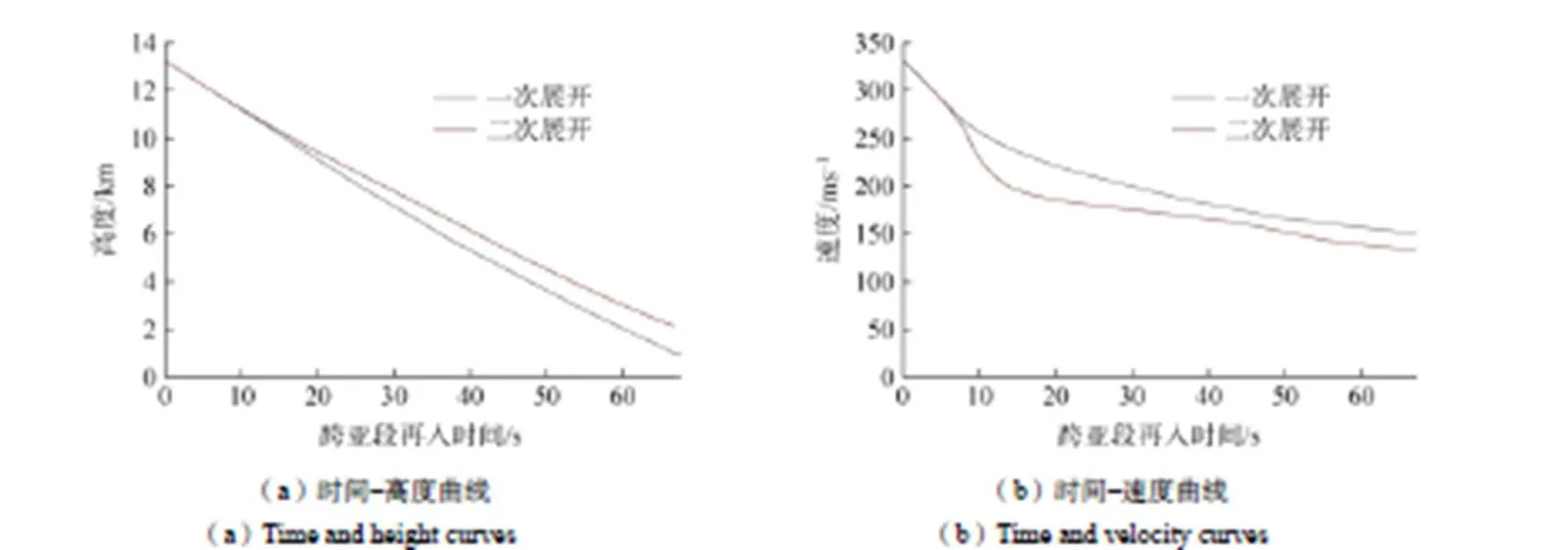
图3 弹道分析
这一现象还可以用描述维持系统速度能力的弹道系数进一步解释:
式中为气动面投影面积;d为阻力系数。
图4为根据式(1)计算得到的两种状态在不同马赫数下的弹道系数,从图4看出,即使两状态的阻力系数d有所波动,但由于状态II的气动面投影面积明显大于状态I,导致状态II的弹道系数m在整个跨亚声速段小于状态I,说明状态II维持原速度的能力更弱、减速效果更优。
图4 弹道系数曲线
由此可以证明:当机械式可展开气动减速系统的减速效果明显减弱时,采用二次展开可再次提高系统的减速能力、实现系统二次减速。
3 气动特征分析
3.1 升阻特征
图5为两个状态在不同马赫数条件下的升阻比/随攻角变化曲线。
通过分析可知:在不同马赫数下,状态II(二次展开)的升阻比/随着攻角变化的趋势是先减小、后增大然后又减小;在小攻角(0°~50°)及大攻角(150°~180°)范围内,状态II的升阻比/受马赫数变化影响不明显,而在50°~150°攻角范围内,其升阻比/随马赫数的减小而增加。以上状态II的规律,状态I(一次展开)亦然。
进一步比较可知:相同马赫数条件下,在(0°~90°)攻角范围内,两状态的升阻比/曲线重合度较高,表明状态II保留了状态I的升阻特性。而在(90°~180°)攻角范围内,两状态的升阻比/曲线重合度较差。这是因为,在(0°~90°)攻角范围内,两个方案的迎风面主要是球锥构型,钝度比的变化(状态I的钝度比为/1、状态II的钝度比为/2)对系统升阻比变化率Δ(/)的影响相当小,不超过1%[15]。而当攻角扩大到(90°~180°)范围时,图2中所示的主体部分对流场影响逐渐明显,由于两个状态的气动面高度不同(状态I的气动面高度为1、状态II的气动面高度为2),则它们的主体部分对流场影响程度也不同,所以两状态的升阻比/表现出不同。
图5 升阻比曲线
3.2 静稳定性
图6为两个状态在不同马赫数条件下的俯仰力矩系数m随攻角变化曲线,从图中看出:
状态I(一次展开)在=0°和180°处满足式(2),即表示状态I在跨亚声速段存在两个静稳定点,这在工程上是不希望出现的。而采用二次展开后,仅在=0°处满足式(2),即表示状态II在跨亚声速段存在唯一的静稳定点,能保持0°攻角再入。
从图6进一步发现,在不同马赫数下,状态II在=0°处的斜率绝对值大于状态I在=0°处的斜率绝对值,即:
这说明状态II在=0°处的静稳定性更强。
图6 俯仰力矩系数曲线
由此可以证明:二次展开具备保证机械式可展开气动减速技术在跨亚声速段仅存在唯一的静稳定点,且使该点静稳定性更强的能力。
4 结束语
本文提出了一种机械式可展开气动减速技术二次展开结构方案,并针对二次展开的气动外形开展了跨亚声速段减速效果、升阻特性及静稳定性研究,得出结论如下:
1)二次展开状态的减速效果明显优于一次展开状态;
2)二次展开状态的升阻比随攻角及马赫数变化规律与一次展开状态一致。在小攻角范围内,两状态的升阻比变化不大,状态II保留了状态I的升阻特性。大攻角范围内,两状态的升阻比差异明显;
3)二次展开状态在跨亚声速段存在唯一的静稳定点,且该点的静稳定性强于一次展开状态;
4)机械式可展开气动减速技术采用二次展开方案能够实现在跨亚声速段继续减速和姿态稳定的目的。
[1] JOSEPH A D C, CHEATWOOD F M, BRUCE III W E, et al. Advanced High-temperature Flexible TPS for Inflatable Aerodynamic Decelerators[C]//21st AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Dublin, Ireland, AIAA 2011-2510, 2011.
[2] ETHIRAJ V. Enabling Venus and Outer-planet In-situ Science Missions with Deployables[R]. Portsmouth: International Planetary Probe Workshop, 2011.
[3] 高艺航, 贺卫亮. 充气式返回舱气动热特性研究[J]. 航天返回与遥感, 2014, 35(4): 17-25. GAO Yihang, HE Weiliang. Research on Aerodynamic Heating Characteristics of Inflatable Reentry Decelerator[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(4): 17-25. (in Chinese)
[4] 张鹏, 李旭东, 白良浩, 等. 半刚性机械展开式气动减速技术述评[J]. 航天返回与遥感, 2016, 37(1): 1-9. ZHANG Peng, LI Xudong, BAI Lianghao, et al. Review of Semi-rigid Mechanical Deployable Aerodynamic Deceleration Technology[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(1): 1-9. (in Chinese)
[5] 侯向阳, 张鹏, 包军, 等. 考虑变形影响的棱台式柔性外形气动力/热环境研究[J]. 航天器环境工程, 2017, 34(3): 229-234. HOU Xiangyang, ZHANG Peng, BAO Jun, et al. Aerodynamic Force and Heat Environment of Prismatic Flexible Aeroshell with Consideration of its Deformation[J]. Spacecraft Environment Engineering, 2017, 34(3): 229-234. (in Chinese)
[6] YOUNT B, AMOLD J O, GAGE P, et al. Structures and Mechanisms Design Concepts For Adaptive Deployable EntryPlacement Technology[C]//AIAA Aerodynamic Decelerator Systems, 2012.
[7] VENKATAPATHY E, HAMM K, FEMANDEZ I, et al. Adaptive Deployable Entry and Placement Technology(ADEPT): A Feasibility Studyfor Human Missions to Mars[C]//21st AIAA Aerodynamic Decelerator Systems Technology conference and Seminar, Dublin, Ireland, 2011.
[8] BRANDON S, ETHIRAJ V, DINESH P, et al. Venus in Situ Explorer Mission Design Using a Mechanically Deployed Aerodynamic Decelerator[R]. Big Sky: IEEE Aerospace Conference, 2013.
[9] STEM E, BAMHARDT M, VENKATAPATHY E, et al. Investigation of Transonic Wake Dynamics for Mechanically Deployable Entry Systems[C]//Aerospace Conference, 2012: 1-10.
[10] SAIKIA S J, SARANATHAN H, GRANT M J, et al. Trajectory Optimization for Adaptive Deployable Entry and PlacementTechnology (ADEPT)[C]//AIAA/AAS Astrodynamics Specialist Conferences, San Diego, AIAA 2014-4139, 2014.
[11] SMITH B, YOUNT B, VENKATAPATHY E, et al. Progress in Payload Separation Risk Mitigation for a Deployable Venus Heat Shield[C]//AIAA Aerodynamic Decelerator Systems, 2013.
[12] WERCINSKI P F, VENKATAPATHY E,GAGE P J. Enabling Venus In-situ Science-deployable Entry System Technology, Adaptive Deployable Entry and Placement Technology (ADEPT): A Technology Development Project Funded by Game Changing Development Program of the Space Technology Program[R]. NASA Technical Repont, 20130001711.
[13] 夏刚, 程文科, 秦子增. 充气式防热罩再入轨道设计[J]. 国防科技大学学报, 2002, 24(3): 4-8. XIA Gang, CHENG Wenke, QIN Zizeng. Re-entry Trajectory Design of Inflatable Thermal Shield[J]. Journal of National University of Defense Technology, 2002, 24(3): 4-8. (in Chinese)
[14] GMBH A, WILDE D, WALTHER S. Inflatable Reentry and Descent Technology (IRDT)–Further Development[R]. Arcachon, France: 2ndInternational Symposium of Atmospheric Reentry Vehicles and Systems, 2001.
[15] HIRSCHEL E H, WEILAND C. 高超声速飞行器气动力热设计问题精选[M]. 国防工业出版社, 2013.HIRSCHEL E H, WEILAND C. Selected Aerothermodynamic Design Problems of Hypersonic Flight Vehicles[M]. National Defense Industry Press, 2013. (in Chinese)
(编辑:刘颖)
Research on Second Deployment of Mechanical Deployable Aerodynamic Deceleration Technology in the Transonic and Subsonic Stages
HOU Xiangyang1,2ZHANG Hongying1ZHANG Peng2GUI Shuwang1HOU Yanze2
(1 Ministerial Key Discipline Laboratory of Advanced Design Technology of Aircraft, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China) (2 Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China)
This paper presents a second deployment scheme of mechanical deployable aerodynamic deceleration technology, by means of adding a lengthening rod, a flexible bearing cover and an elastic unit along the direction of the ribs. Using the aeroshell of second deployment, this paper studies the deceleration effect, lift-to-drag characteristics and static stability in the transonic and subsonic stages through three aspects, including trajectory, lift-to-drag ratio and pitching moment coefficient. The results show that the deceleration effect of the second deploymentstateis obviously better than first deployment state. Secondly, the law of the lift-to-drag ratio in the second deployment state varies with the angle of attack and Mach number is consistent with the first deployment state. Thirdly, the lift-to-drag ratios of two deployment state have little change in the range of small angle of attack, and the difference between the lift-to-drag ratios of two deployment states are obvious in the range of large angle of attack. Finally, the second deployment state has a unique static stability point, and its stability is better than the first deployment state in the transonic and subsonic stages. The study indicates that the mechanical deployable aerodynamic deceleration technology can achieve the purpose of continuing deceleration and attitude stabilization by using the second deployment scheme in the transonic and subsonic stages, and the application of second deployment scheme in mechanical deployable aerodynamic deceleration technology has engineering feasibility. The content of this paper laid the foundation for the implementation of second deployment scheme of mechanical deployable aerodynamic deceleration technology.
smechanical deployment; aerodynamic deceleration technology; second deployment; deceleration effect; lift-to-drag ratio; static stability; spacecraft entry and re-entry
V423.6
A
1009-8518(2018)02-0001-07
10.3969/j.issn.1009-8518.2018.02.001
2017-12-07
国家重大科技专项工程
侯向阳,男,1976年生,高级工程师,研究方向为航天器系统设计、气动设计及总装集成设计。E-mail:m13683344423@163.com。张鹏,男,1982年生,2011年获华中科技大学固体力学专业博士学位,研究方向为航天器系统设计、气动设计及总装集成设计。E-mail:zhangpeng01061014@163.com。
