基于重叠网格理论的拍动翼推进特性研究
2018-05-16李永成徐令令赵桥生张安通王习建
李永成,徐令令,赵桥生,张安通,王习建
(中国船舶科学研究中心 水动力学国防重点实验室,江苏 无锡214082)
0 引 言
拍动翼是一种用于描述鱼类游动及鸟类翅膀运动的常用简化模型。就鱼类游动而言,拍动翼的原型为Carangiform和Thunniform等类型的鱼类,主要通过尾鳍的摆动获得推进力,身体的大部分区域呈刚性状态[1]。在一定的参数条件下,耦合了升沉运动和俯仰运动的拍动翼可获得相应的推进力而向前运动。
对拍动翼推进特性的研究最早可追溯至20世纪90年代,其数值研究方法主要分为以下2类。
(1) 直接数值模拟。相比于试验和传统的势流理论研究,通过直接数值模拟可更好地、更真实地反映流场,并可捕捉到相关的细节,主要代表为WANG[2],LEWING[3],GAO等[4]及SHAO等[5]的研究。然而,直接数值模拟方法对网格数目和网格质量的要求很高,考虑到计算资源和计算时间的有限性,直接数值模拟一般局限于低雷诺数,与真实流场的差距仍然很大。
(2) 动网格技术。相比于直接数值模拟方法,动网格技术可应用于大雷诺数下的拍动翼数值模拟,弥补了直接数值模拟方法的局限性,主要代表为李宁宇[6]和王志东[7]的研究。动网格技术仍然存在一定的局限性,对于运动幅值过大的工况,网格容易出现负体积,计算精度不高。
本文基于上述研究,引入一种新的求解方法,即重叠网格技术,系统地考察拍动翼各运动参数对拍动翼推进特性的影响,为研制基于拍动推进的仿生机器提供参考。
1 计算模型
计算模型选用NACA0012剖面的翼型,展弦比为图1为计算模型,其中:y′轴为转动轴;Z轴为升沉运动方向;C为拍动翼弦长;B为展长。
计算中,均匀来流以速度U0沿x轴方向,从左至右流过机翼。对于拍动翼的运动(见图2),在z轴方向上的升沉运动和绕y′轴的转动方程为


图1 计算模型
式(1)和式(2)中:h0和θ0分别为升沉振幅及俯仰振幅;f为拍动频率;为升沉俯仰间相位差。同样取机翼弦长C为特征长度,均匀来流速度U0为特征速度,则无量纲Re数和St数可分别定义为其中ν为流体运动黏度。
拍动翼的推进效率可定义为单位时间内输出功率与输入功率的比值,计算式为

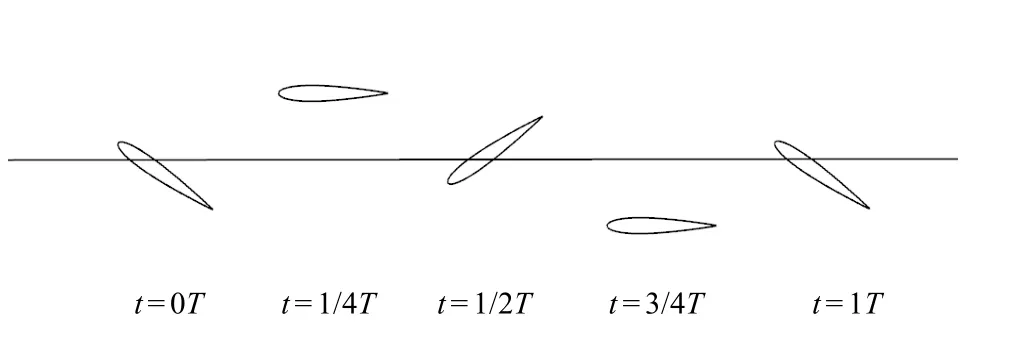
图2 拍动翼运动示意
式(3)中:Pout和Pin分别为一个周期内的平均输出功率及平均输入功率;为一个周期内拍动翼产生的平均推力。
2 数值方法
本文主要借助商业软件中的重叠网格功能,采用RANS求解器对拍动翼的流场进行数值求解。重叠网格是指将复杂的流动区域划分为若干个简单的子区域,在每个子区域内单独形成网格,根据各子区域间网格的重叠进行数据交换来传递流场信息的一种结构化网格方法[8]。
重叠网格建立子网格间的耦合关系主要分为挖洞、寻点和插值等 3个步骤,具体过程可参考文献[9]。
(1) 挖洞:由于落入壁面内部的网格点在计算流体动力学(Computation Fluid Dynamics,CFD)流场计算中无实际意义,因此需在给定的网格中将落在指定区域内的网格单元从参与流场计算的网格单元集合中剔除,该过程称为“挖洞”(见图3)。
(2) 寻点:在网格空间内对已知点或已知区域进行搜索,得到与之相关的网格单元。
(3) 插值:由插值点与相邻贡献单元间的相对关系获得待插值点信息,进行网格间数据的传递。
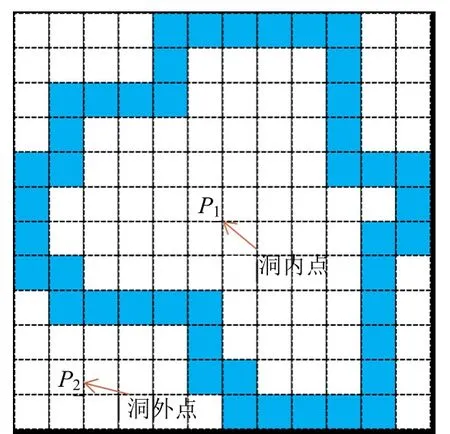
图3 洞映射示意
计算模型的重叠网格和背景网格见图4。以机翼弦长C为特征长度,重叠网格域的网格间距为0.03C,网格增长比例为。
图4a)为拍动翼周围的重叠网格,为减少网格数目重叠域,一般控制在恰好包裹模型即可,该部分网格随着拍动翼一起运动,并与周围的背景网格(图 4b))进行插值交换流场信息。2套网格嵌套之后的效果见图5。
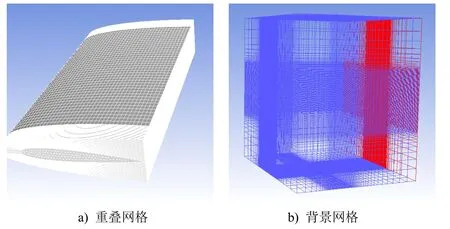
图4 拍动翼重叠网格与背景网格示意
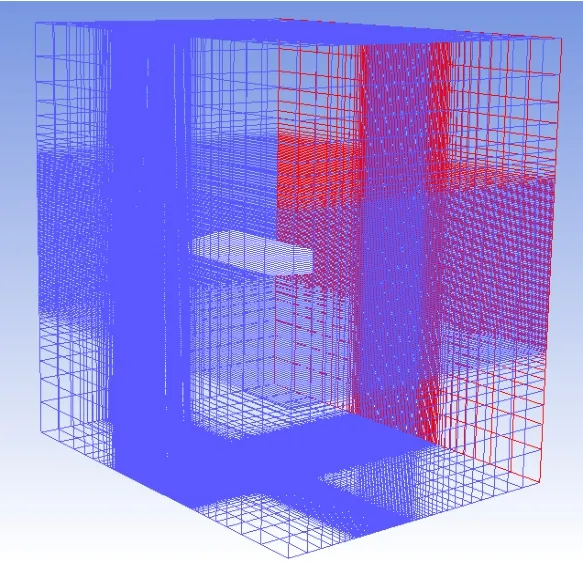
图5 网格嵌套示意
3 结果分析
在正式计算之前,首先对重叠网格方法的准确性进行验证。考虑到国内外大多采用直接数值模拟方法(Direct Numerical Method,DNS)与浸没边界法(Immersed Boundary Method,IBM)相结合的方式来研究拍动翼[7],这里对利用这2种方法计算得到的结果进行比较分析。相应的运动参数为:θ=30°,ψ=90°,利用2种方法得到的水动力系数变化对比见图6。

图6 水动力系数变化对比
由图6可知,利用2种方法计算得到的拍动翼阻力系数和升力系数的幅值及随时间变化的趋势近乎一致,且阻力系数的变化周期为拍动翼运动周期的1/2,与参考文献的结论相符,由此可验证重叠网格方法在处理拍动翼问题方面的准确性。下面分析拍动翼各运动参数对推进特性的影响。
3.1 升沉俯仰相位差对推进性能的影响
图7给出在不同来流速度下推进效率随升沉俯仰相位差的变化情况,升沉俯仰相位差0ψ的变化范围为50°~110°,其他参数设置为:θ=30°,f=0.6Hz,h=1.0C。
由图7可知:在某一固定来流速度下,推进效率均随着ψ0的提高而先增大后减小,且在90°附近取得最大值。这一结论与潘定一[1]等人得出的结论一致。结合式(1)和式(2),当ψ0=90°,拍动翼在升沉方向上到达平衡位置(y/ C=0)时,达到最大俯仰角;当整个机翼呈抬头状态时有向上运动的趋势,而当整个机翼呈低头状态时对应于向下运动。当机翼上下升沉振幅达到最大时,机翼弦线与来流方向平行,即俯仰角θ=0°。
此外,随着来流速度的增大,拍动翼推进效率有所降低,可理解成为获得更大的来流速度,拍动翼输入功率大幅增加,而输出功率增加值较小,因此推进效率有所损失。
3.2 俯仰振幅对推进性能的影响
图8给出在不同来流速度下推进效率随俯仰振幅的变化情况,俯仰振幅0θ的变化范围为5°~50°,其他参数设置为:ψ0=90°,f=0.6 Hz,h=1.0C。

图7 在不同来流速度下推进效率随升沉俯仰相位差的变化
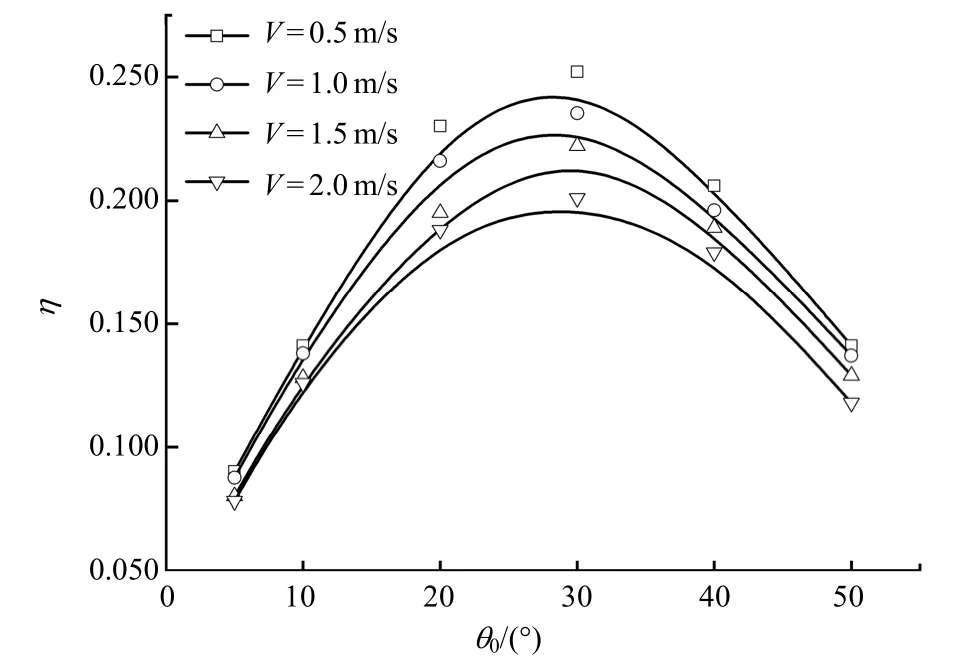
图8 在不同来流速度下推进效率随俯仰振幅的变化
由图8可知:与升沉俯仰相位差影响类似,在某一固定来流速度下,推进效率亦随着θ0的增大而先增大后减小,且在30°附近取得最大值;随着来流速度的增大,推进效率亦有所降低。因此,在后续计算中选取 θ0=30°。
3.3 斯特劳哈尔数对推进性能的影响
图 9给出在不同来流速度下拍动翼推进效率随 St数的变化情况,St数的变化范围为0.2~1.2,其他参数设置为:ψ0=90°,θ=30°,h=1.0C。
由图 9可知:在某一固定来流速度下,推进效率依旧随着St数的增加先增大后减小,且存在与最大推进效率相对应的St数;随着来流速度的增大,最大推进效率所对应的最佳St数也增大,但最大推进效率值有所降低。这就意味着为获得更大的推进速度,推进效率必然有所损失。
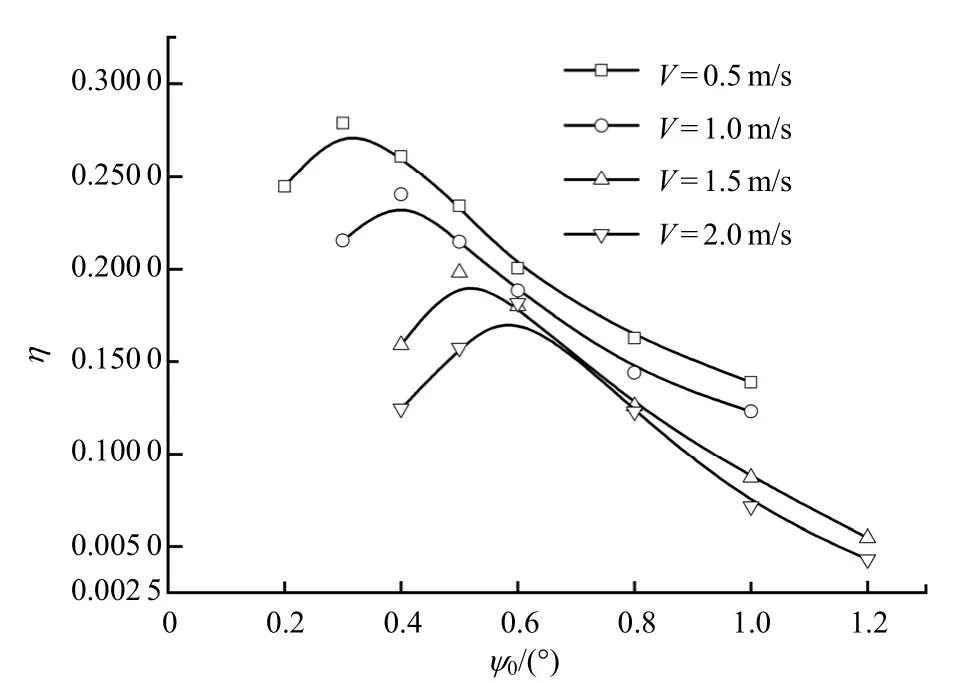
图9 推进效率随St数的变化
3.4 拍动翼后方的涡结构
由于拍动翼的推进性能与其后方的涡结构密切相关,因此很有必要对涡结构进行分析,并尝试解释上述计算结果。下面以ψ0=90°,θ=30°,h=1.0C,St=0.3为例展示后方的涡结构。
图10为λ准则下涡结构三视图。由图10可知,拍动翼的前缘涡沿着水翼上表面运动至尾缘处开始脱落,脱落的前缘涡与拍动翼两侧的翼梢涡相连,尾缘脱落涡与翼梢涡相连,同时与前缘涡在机翼前缘角点处连接,最终形成涡环。此外,由图 10a)可知,脱落涡环在流向的长度与拍动翼的弦长也近似相等,涡环的展向长度也近似等于拍动翼展长。该现象与BLONDEAUX等[10]的试验结果较为一致。

图10 λ准则下涡结构三视图
下面尝试从流动机理的角度对上述结果进行解释。以俯仰振幅对推进性能的影响为例,分别选取的拍动翼后方涡结构进行分析,其他参数分别为:图11为θ=10°,30°和50°时拍动翼后方涡结构图。
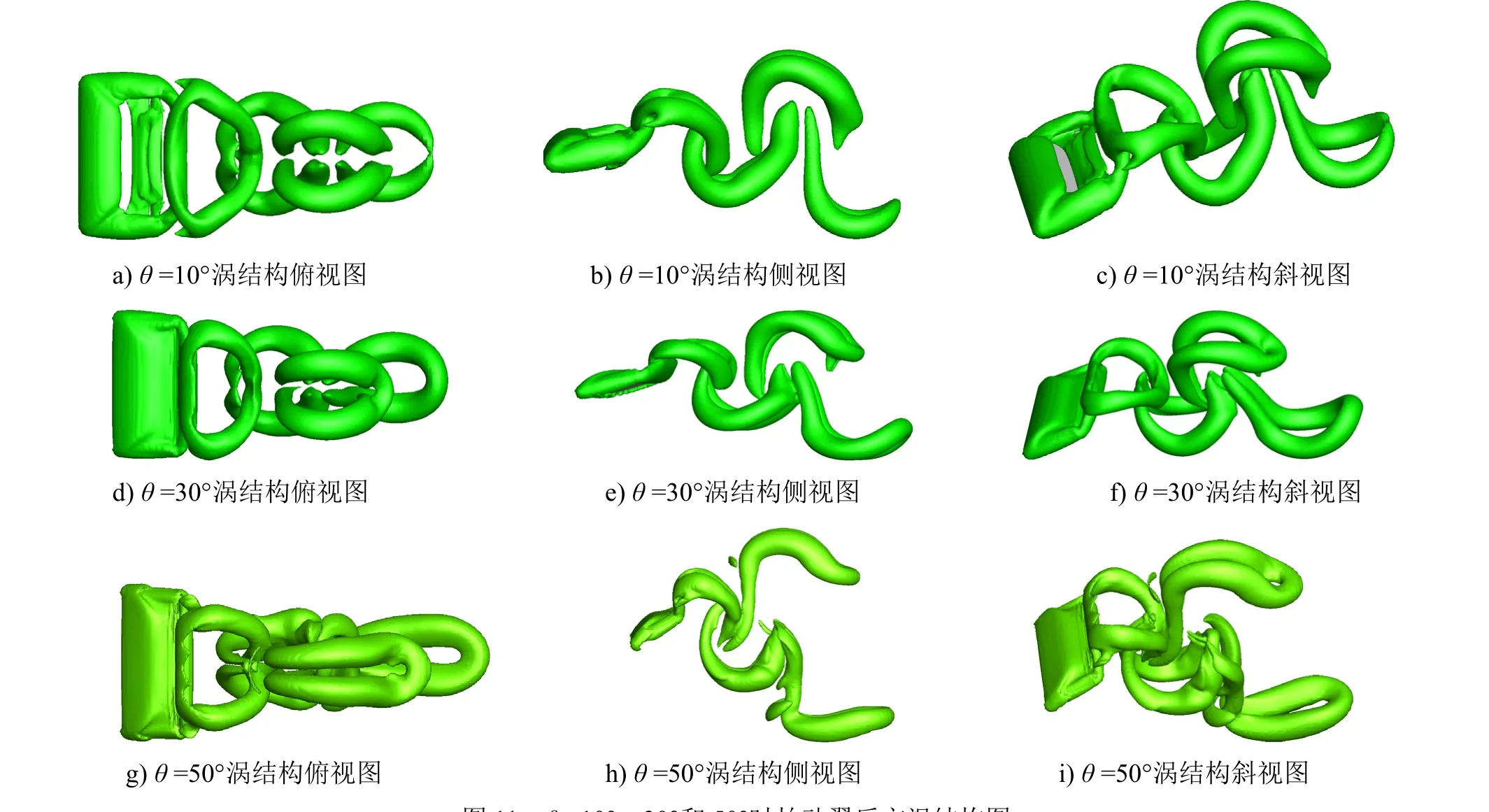
图11 θ=10°,30°和50°时拍动翼后方涡结构图
结合图8,推进效率随着θ的增加而增大并在30°附近达到最大值,随后又开始减小。由图11可知,由于涡环与来流方向之间存在一定的倾角,因此涡环沿其轴向所诱导的流动可分解为流向成分和垂向成分,而流向成分又与拍动翼的推进效率密切相关。当θ从10°增大到30°时,涡环倾角的逐渐减小使得涡环的轴向与流向更加接近,这使得射流的流向动量增加,流向成分比重较大,因此推进效率随之升高;同理,当θ从30°增大到50°时,涡环倾角增大较多,涡环逐渐偏离轴线,涡环耗散加快出现分离,因此推进效率有所降低。
4 结 语
本文在已有研究的基础上引入一种新的求解方法对拍动翼进行研究分析。同时,将计算结果与利用浸没边界法得到的结果相对比,验证本文求解方法的准确性,随后探讨拍动翼的各运动参数对推进性能的影响。本文采用的计算方法可为其他动边界问题的处理提供借鉴。
【 参 考 文 献 】
[1] 潘定一.基于沉浸边界法的鱼游运动水动力学机理研究[D].上海:浙江大学,2012.
[2] WANG Z J.Vortex shedding and frequency selection in flapping flight[J].Journal of Fluid Mechanics, 2000, 410: 323-341.
[3] LEWIN G C, HAJHARIRI H.Modelling thrust generation of a two-dimensional heaving airfoil in a viscous flow[J].Journal of Fluid Mechanics, 2003, 492: 339-362.
[4] GAO T, LU X Y.Insect normal hovering flight in ground effect[J].Physics of Fluids, 2008, 20 (8): 425.
[5] SHAO X M, PAN D Y, DENG J, et al.Hydrodynamic performance of a fishlike undulating foil in the wake of a cylinder[J].Physics of Fluids, 2010, 22 (11), 111903.
[6] 李宁宇,苏玉民,刘葳兴,等.基于浸入边界法的拍动翼尾涡结构与水动力分析[J].应用科技,2015, 42 (6): 26-31.
[7] 王志东,张晓庆,丛文超.柔性摆动水翼弦向变形模式及其对推进性能的影响研究[J].船舶力学,2010, 14 (7): 699-707.
[8] 赵发明,高成君,夏琼.重叠网格在船舶CFD中的应用研究[J].船舶力学,2011, 15 (4): 332-341.
[9] 李亭鹤.重叠网格自动生成方法研究[D].北京:北京航空航天大学,2004.
[10] BLONDEAUX P, FORNARELLI F, GUGLIELMIN L, et al.Numerical experiments on flapping foils mimicking fish-like locomotion[J].Physis of Fluids, 2005, 17 (11): 113601.
