TDC-GP2在汽车防撞系统设计中的应用
2018-05-15王生毅马宗敏李康康张真榕
王生毅 马宗敏 李康康 张真榕
摘 要: 为了解决以单片机为主控制器的倒车防碰撞系统精度不高、拓展性不强等问题,结合超声波测距原理,提出基于FPGA和TDC?GP2高精度的倒车防碰撞系统设计。该系统以FPGA芯片為主控制器,采用模块化思想进行设计,利用TDC?GP2高精度时差测量芯片测量超声波传播时差计算车尾与障碍物的垂直距离,使得系统测量距离实现mm级精度,同时实现距离语音提示和距离LED直观显示。经测试,该系统工作稳定、性能良好、精度高,可以成功应用于汽车的倒车系统中。
关键词: 防撞系统; FPGA; 超声波测距; TDC?GP2; 时差法; 倒车系统
中图分类号: TN752.6?34; TP911 文献标识码: A 文章编号: 1004?373X(2018)10?0015?04
Abstract: To resolve the problems such as low precision and weak extensibility of auto reversing anti?collision system which takes SCM as the main controller, a high?precision auto reversing anti?collision system based on FPGA and TDC?GP2 is designed by combining with the ultrasonic distance measurement principle. In the system, the FPGA chip is taken as the main controller, and the idea of modularized design is adopted. The high?precision time difference measurement chip TDC?GP2 is used to measure the time difference of ultrasonic propagation and calculate the vertical distance between the rear end of automobile and the obstacle, so as to achieve the MM?level precision of distance measurement for the system and meanwhile achieve the voice prompt and LED visual display of the distance. The test shows that the system operates stably, has good performance and high precision, and can be successfully applied to the auto reversing system.
Keywords: anti?collision system; FPGA; ultrasonic distance measurement; TDC?GP2; time difference method; auto reversing system
0 引 言
驾驶员在停车位泊车或路上倒车时,倒车影像中车体与车身后边障碍物的距离并不能很直观反映真实距离,为此驾驶员需靠倒车系统语音提示来判断实际距离进行泊车或倒车。为提高驾驶员倒车的安全性,对一种高精度、低成本、推展性强的汽车倒车防撞预警系统提出了迫切要求。张安然以单片机主控制器设计了一种倒车防碰撞系统[1],成本低,但精度不高。本文以FPGA为主控制器,利用TDC?GP2高精度时差测量芯片测量超声波传播时差,进而计算车尾与障碍物的垂直距离,设计了汽车倒车语音提示系统。该系统电路结构设计合理、工作稳定、性能良好、精度高、实时检测速度快。
1 超声波测距原理
超声波测距原理是不断检测超声波在遇到障碍物而反射回来的反射波,进而测量发射超声波与接收反射波之间的时间差[t]来计算距离S。若已知超声波在空气中传播速度为C,则距离为:
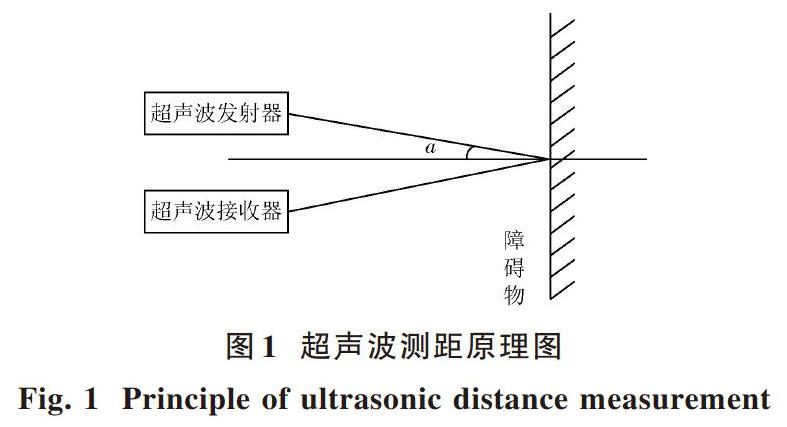
在倒车防碰撞系统中,超声波发射模块和接收模块之间安装距离间隔很小,如图1所示。而相对于超声波在空气中传输的速度来说,车体在倒车状态下的运行速度非常小。所以本系统在设计时忽略车身速度的影响,认为计算所得S即为车身与障碍物距离。
2 总体设计方案
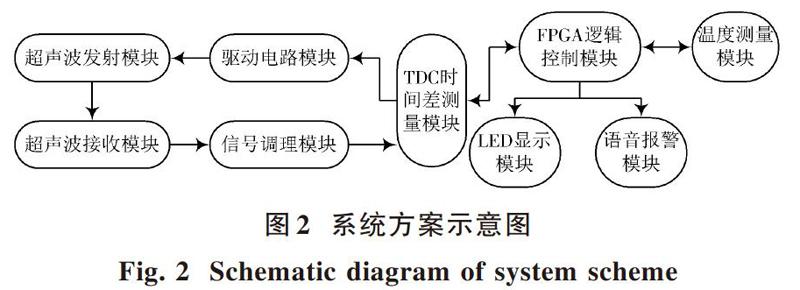
该系统以FPGA芯片为主控制器,采用模块化思想进行设计。硬件部分包括温度测量模块、FPGA控制模块、LED显示模块、语音报警模块、TDC时差测量模块、驱动发射模块、信号调理模块与超声波发射接收模块。系统结构示意图如图2所示。
系统接通电源后,FPGA主控制器产生一个初始信号,使相关模块完成初始化和寄存器的配置。随后系统进入等待状态。一旦FPGA主控制器检测到开始信号(汽车进入倒车状态),FPGA主控制器控制温度测量模块工作,并将结果保存在测温模块的寄存器中。同时FPGA主控制器控制TDC芯片输出两路40 kHz的同相脉冲信号,其中一路为驱动发射电路,使超声波发射模块发射超声波,另一路脉冲信号作为START始能信号触发TDC模块开始时差测量工作。超声波接收模块接收到回波信号,经信号调理模块处理后,以STOP信号进入TDC模块。TDC模块判断接收到回波后,结束测量,内部ALU单元计算出时间间隔,并将结果送入寄存器保存起来。TDC芯片通过INTN端口返回给FPGA一个中断信号,通知FPGA读取测量的时差信息和温度信息。FPGA中ALU單元基于读取的温度和时差信息进行相关计算,并将最后计算所得距离信息适时直观地显示在LED显示模块上,同时语音报警模块发出报警声音。
3 系统硬件电路设计
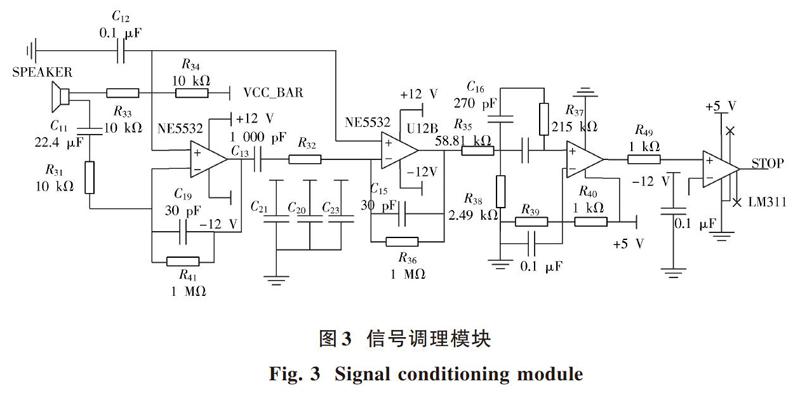
3.1 信号调理模块设计
信号调理模块如图3所示,此模块主要起放大、滤波、整形、检波作用[3]。超声波接收模块接收到的回波信号(正弦波)比较微弱,为mV级别,不足以触发TDC芯片,需要对回波信号进行放大处理。NE5532是一款专业的音频前端放大专用芯片,具有高性能低噪声,线性失真度小的特点。此处采用该放大芯片组成二级放大电路对回波信号进行放大处理,形成1.3~4.8 V的方波信号。超声波回波信号中不可避免地夹杂有一些噪声,故在回波信号放大后,应先滤除这些干扰噪声来提高回波信号质量。回波信号的有用信号频率为40 kHz,为了消除噪声信号为下一步的整形电路输入更高信噪比的回波信号,此处设计了基于LM324的二阶巴特沃斯带通滤波器(中心频率为40 kHz)来滤除噪声信号。滤波电路出来的信号最终要触发中断,因此必须是一个逻辑信号。所以采取将滤波后的回波信号进入电压比较器,通过与门限电压比较,来确定超声波回波的到来与否[4?6]。
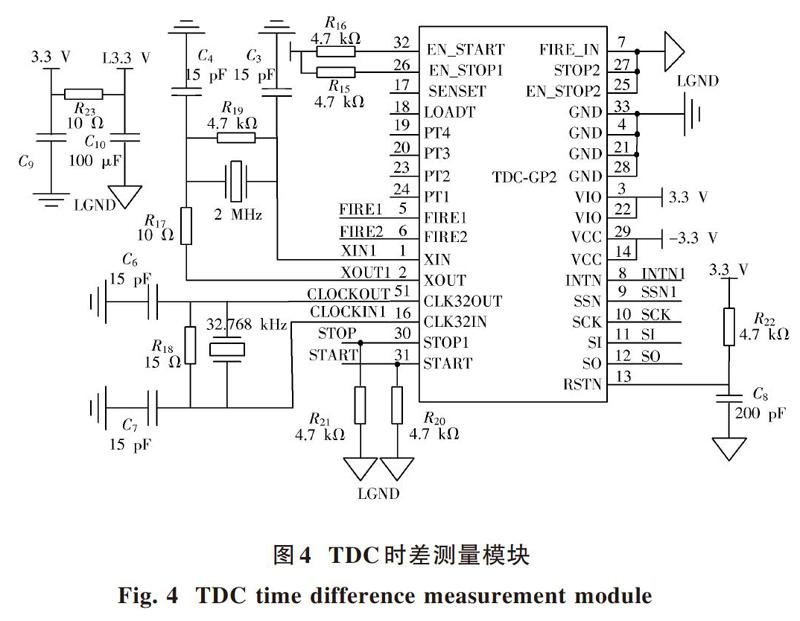
3.2 TDC时差测量模块设计
由于倒车防碰撞系统所需要测算的距离都比较近,超声波的传输时间比较短,所以需要一个高精度的时差测量模块才可以进行高精度的距离测量。此系统采用德国公司生产的TDC?GP2芯片来进行超声波传输时间的测量。TDC时差测量模块如图4所示。使用TDC芯片自带的脉冲发射模块产生40 kHz超声波驱动脉冲,TDC芯片外接2 MHz高速石英晶振。所以不需要对晶振校准。使用TDC芯片时,要注意VCC和VIO的隔离或者采用VIO大于VCC的方式接入电源,否则容易烧毁TDC芯片。结合具体的使用环境,TDC芯片选择测量模式2,典型分辨率为50 ps,间隔脉冲对的分辨能力为2个校准时间周期[7]。
在测量过程中,由FPGA控制TDC芯片生成40 kHz脉冲信号FIRE驱动超声波发生模块驱动,同时该信号作为START信号触发测量模块启动测量工作。经过信号调理模块的回波信号作为STOP进入TDC芯片,TDC芯片停止测量。TDC芯片通过四线SPI总线接口(SSN,SCK,SI,SO四个接口)和FPGA相连进行数据通信。
FPGA通过SPI总线接口可以对TDC芯片进行配置,也可以在测量结束后通过SPI接口读取测量所得的时间数据。INTN的电平跳变作为中断信号驱动FPGA主控制器读取状态寄存器。信号调理模块越靠近TDC测量模块越好,这样可以减少引入误差,从而提高测量精度[8]。
4 系统软件设计
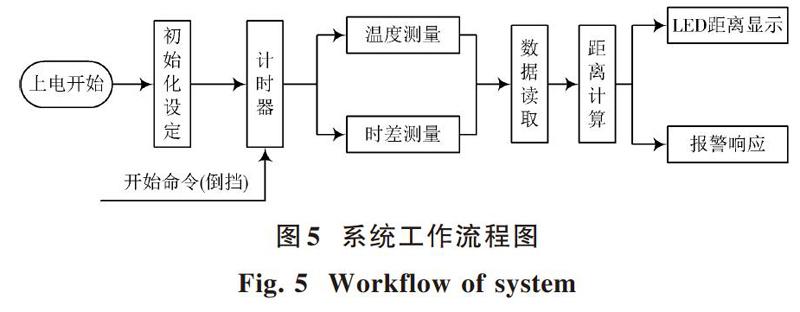
在该系统中,选用FPGA芯片作为整个系统的控制中心,控制各个相关模块有序地执行相应功能。系统时序流程图如图5所示。
系统接通电源后,FPGA芯片首先通过SPI总线和温度单总线完成对TDC芯片和DS18B20的初始配置,此后进入等待状态,检测到开始命令到来,启动计时器,开始测量。一次测量结束后,FPGA读取温度和时差信息,ALU计算得出距离信息,并控制LED显示出来,同时语音报警。此过程持续进行,直到结束命令到来,时差测量模块报警模块结束工作。FPGA主控制器通过SPI总线控制TDC芯片进行超声波传输时间测量的流程图如图6所示。
系统上电时,FPGA主控制器发送0x50对TDC芯片初始化配置,同时对TDC芯片选择测量模式2,随后系统进入等待状态。汽车进去倒车状态的同时给FPGA主控制器一个开始测量命令,主控制器发送0x01触发TDC芯片生成40 kHz的脉冲信号控制驱动电路驱动发生模块发射超声波。回波信号经信号调理模块后作为STOP信号进入TDC芯片。INTN标志端口发送中断信号,通知FPGA测量结果。
5 系统测试结果
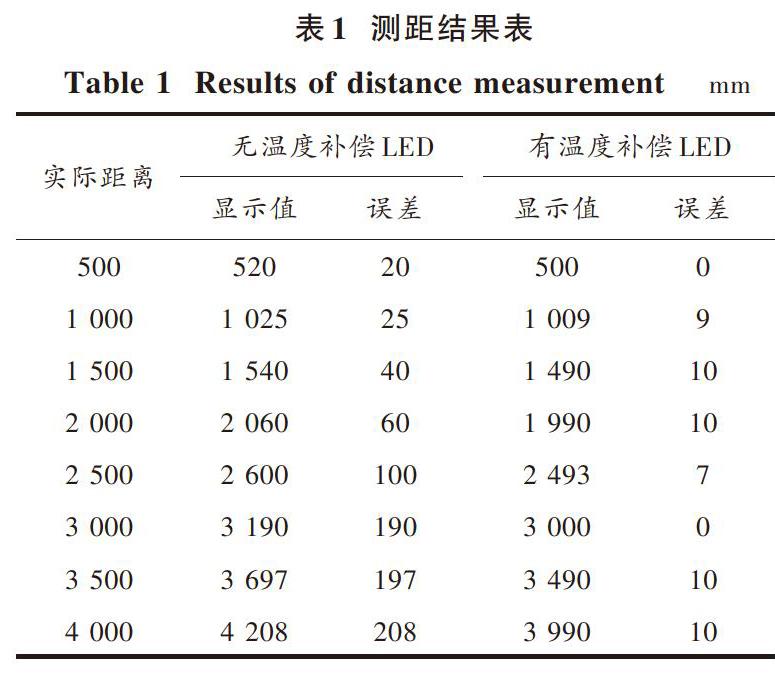
考虑到实际使用情况,设计的系统最大量程为4 m,精度为1 mm。在 测试系统时,为了验证系统在小距离下的精确度与可靠性,在室外选200~4 000 mm之间的8组距离分别进行50次测量取其平均值对比,结果如表1所示。加入温度补偿前后系统的误差对比图如图7所示。
通过测量结果分析可以发现,加入温度补偿模块后系统的误差更小,几乎与实际距离曲线重合。误差主要来源于时间测量误差、硬件电路信号传输影响带来误差、测距时探头机械位置微小变化等[9?10]。
6 结 论
本文设计一种高精度、高可靠性的超声波倒车防碰撞系统。其采用FPGA作为主控制器,通过TDC?GP2芯片实现超声波传播时间的高精度测量。经过FPGA中ALU单元来计算车体与障碍物距离,报警系统及时响应,达到提醒司机安全驾驶的目的。通过测试,系统在精度与可靠性方面均满足预期要求,有很高的实用价值。此外基于FPGA丰富的I/O接口和高效的程序重构性,可以增加汽车ABS系统(刹车系统)车载空调等拓展,使系统更加智能化。

参考文献
[1] 胡继胜,赵力.汽车倒车雷达设计[J].电子技术应用,2010,36(9):108?111.
HU Jisheng, ZHAO Li. Auto reversing radar design based on ATmega16 [J]. Application of electronic technique, 2010, 36(9): 108?111.
[2] 张德华,吕敏.超声波式物位测量[J].计量与测试技术,2006,33(1):16.
ZHANG Dehua, L? Min. Measurement of level with ultrasonic [J]. Metrology & measurement technique, 2006, 33(1): 16.
[3] 赵珂,向瑛,王忠,等.高准确度超声波测距仪的研制[J].传感器技术,2003,22(2):55?57.
ZHAO Ke, XIANG Ying, WANG Zhong, et al. Development of high accuracy ultrasonic range finder [J]. Journal of transducer technology, 2003, 22(2): 55?57.
[4] 韩博奇.车载倒车雷达系统的研究[D].哈尔滨:哈尔滨工业大学,2006.
HAN Boqi. The research of parking distance control system [D]. Harbin: Harbin Institute of Technology, 2006.
[5] 陈学英,李颖.FGPA应用实验教程[M].北京:国防工业出版社,2013.
CHEN Xueying, LI Ying. FGPA applied experimental course [M]. Beijing: National Defense Industry Press, 2013.
[6] 張和生,宋明耀.提高超声测距精度的设计[J].电子产品世界,2004(13):87?89.
ZHANG Hesheng, SONG Mingyao. The design for improving precision of ultrasound distance measurement [J]. Electronic engineering & product world, 2004(13): 87?89.
[7] 邹轶.近距离高精度超声波测距系统的设计[D].大连:大连理工大学,2009.
ZOU Yi. Design of close quarters and high accuracy ultrasonic distance measure system [D]. Dalian: Dalian University of Technology, 2009.
[8] 杨兵.基于双TDC?GP2的时间间隔测量系统设计与实现[D].太原:中北大学,2016.
YANG Bing. Design and implementation of time interval measurement system based on dual TDC?GP2 [D]. Taiyuan: North University of China, 2016.
[9] 赵海鸣,卜英勇,王纪婵.一种高精度超声波测距系统的研制[J].矿业研究与开发,2006,26(3):62?65.
ZHAO Haiming, BU Yingyong, WANG Jichan. Development of an ultrasonic distance measurement system with high precision [J]. Mining research and development, 2006, 26(3): 62?65.
[10] 张珂,刘钢海.提高超声波测距精度方法的研究[J].现代电子技术,2007,30(15):139?141.
ZHANG Ke, LIU Ganghai. Research on a method of improving ultrasonic ranging precision [J]. Modern electronics technique, 2007, 30(15): 139?141.
