机械臂的力、位置控制浅谈
2018-05-14邓志强
邓志强
[摘 要] 机械臂模拟人臂,其在执行任务过程中会与外界环境相互接触。为了让机械臂作业达到良好的效果,需对机械臂同时进行力和位置的控制。对机械臂力/位置混合控制算法的研究做简单综述。
[关 键 词] 机械臂;力/位置混合控制;柔顺控制;工作原理
[中图分类号] G712 [文献标志码] A [文章编号] 2096-0603(2018)26-0061-01
一、机械臂与柔顺控制
目前工业中使用的机械臂,如上料、下料、喷漆等,都只是简单的轨迹控制,这类控制主要是以机器人运动学为基础,以机械臂末端或每个自由度的位置、速度和加速度为期望,对机械臂的期望轨迹进行跟踪控制,因此常称为位置控制。而机械臂在运动过程中与物体相接触,则为受限运动的控制,这类控制不但要求机械臂沿一定的轨迹运动,还要对它与环境间的接触力进行控制,因此常称为力控。力控制是要实现机械臂末端在受到一些位置约束的自由度上实现与环境间接触力的控制,并且对力的控制精度要求非常高。因此,在机械臂的很多作业情况下,对机械臂作用力的控制尤为重要。要解决这个矛盾,主要靠实现机械臂的柔顺控制,而力/位置混合控制可以实现对机械臂力和位置的同时控制,这也是实现机械臂柔顺控制的重要方法。下面简述一下机械臂的柔顺控制。
二、柔顺控制分类及特点
所谓柔順(Compliance),即是指机械臂对外界环境变化的适应能力。若环境因受到机械臂的作用力而产生形变,机械臂仍能保持期望的接触力与环境相互接触,这即为机械臂的柔顺能力。要对机械臂施加柔顺控制,柔顺控制本质上是力和位置的混合控制,其实现方法有两种:被动柔顺控制与主动柔顺控制。
(一)被动柔顺控制
被动式柔顺控制是由一定的机械装置在与外界环境接触时,通过特殊的结构对相互间的作用力产生的自然顺从。主要是通过自身控制器调节位置控制系统的增益,从而改变机械臂的总体刚度以适应外部环境的刚度。
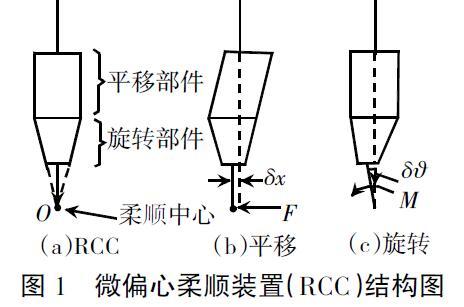
这种装置可以使机械臂与环境作用时吸收或储存能量,这种装置是微偏心柔顺装置(简称为RRC),该装置实际上是一个具有6自由度的弹簧,插装在机械臂的腕部和末端执行器之间,通过调节6个弹簧的弹性,可以获得不同大小的柔顺性,具有一定的自然顺从能力。
由于RCC装置的柔顺中心一旦确定,就很难调整,使得机械臂的通用性较差,也严重制约了RCC的推广与应用。由于本身的缺陷,在RCC装置的实际应用中,并不能完全从根本上解决机械臂应用中的主要问题与矛盾。为了解决这一问题,人们也在寻找另一种可以替代被动柔顺控制的方法。
(二)主动柔顺控制
根据机械臂末端执行器的期望刚度,计算出关节伺服系统的刚度,用控制器来调整关节伺服系统的位置误差增益,使关节刚度与机械臂末端执行器的期望刚度相适应,这种方法称为主动柔顺控制方法。
三、主动柔顺控制工作原理
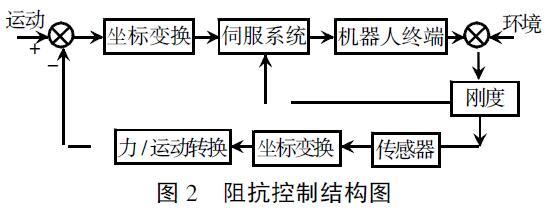
实现机械臂主动柔顺控制的方法是阻抗控制。阻抗控制,顾名思义,是控制力和位置之间的动力学关系,而不是直接控制力和位置,这种动态关系类似于电路中的阻抗,这也是阻抗控制名称的由来。
如图2所示,其中力/运动转换为控制器的设计重点,力/运动转换表达式为:?驻x=KF (1)
其中K为力/运动转换矩阵,通过该矩阵,可将阻抗控制分为两种基本形式:一种是力和位置的关系,可用刚性矩阵来描述,即为刚度控制;另一种是力和速度的关系,可用黏滞阻尼矩阵来描述,即为阻尼控制。K中的元素越大,系统体现得越柔;K中元素越小,系统体现得越刚。
当阻尼反馈矩阵Κ=0时,称为刚度控制。刚度控制只考虑静态,即主要依靠刚度矩阵Κ来表征机械臂末端接触力大小与位置误差之间的关系,位置误差为系统的输入量,具体的表达式为:
F(t)=Kp?驻X (2)
其中KP通常为对角阵,改变对角阵中的值,可以对机械臂柔顺性中的刚度进行调节。
综合上述,阻尼控制可实现主动柔顺控制。因此,阻抗控制更多地应用于装配工作中。
近年来,较多采用模型自适应控制、跟踪控制、滑模控制来提高机械臂力和位置控制对系统的外界干扰、被控模型误差、力检测噪声影响。另外,机械臂柔顺性是其智能化的一个重要方面,是其能够顺利完成各种高要求作业的重要保证,因此机械臂的柔顺控制是将来机器人控制研究的重点与难点。
参考文献:
[1]孙建华.基于网络面向柔顺运动的机器人遥操作系统研究[D].电子科技大学,2004.
[2]殷跃红,朱剑英,尉忠信.机器人力控制研究综述[J].南京航空航天大学学报,1997(2).
