基于AMR传感器SET/RESET功能的磁场精确测量技术
2018-05-14檀杰张晓明陈雷
檀杰 张晓明 陈雷


摘要:针对惠斯通电桥形式实现的四端式AMR传感器存在电桥偏置,在磁场测量的过程中其输出信号经放大采集时出现饱和截止的问题。该文提出一种基于AMR传感器SET/RESET功能的磁场精确测量方法,该方法通过置复位脉冲激励的双端输出翻转补偿,抵消电桥偏置,补全单端截止的输出。实验采用现在标定精度最高的最小二乘椭球拟合标定算法,对AMR传感器进行标定,通过对比椭球拟合图的完整性来评价方法的可靠性。该方法解决传感器的输出受限,拓展传感器的应用环境,满足高精度磁场测试领域,由于只在算法层面进行数据补偿,避免硬件操作,方法简易,具有一定的实用价值。
关键词:各向异性磁阻传感器;电桥偏置;饱和截止;数据翻转;椭球拟合标定
文献标志码:A 文章编号:1674-5124(2018)05-0088-05
0引言
各向异性磁阻传感器(AMR)是基于磁电阻效应的新型磁敏传感器。在侧向、定位以及相关磁场测量中,AMR具有高可靠性、宽频带、小体积、耐恶劣环境等优点,应用范围广泛。通常以惠斯通电桥形式实现的四端式AMR最为常见,但是由于工艺技术限制和惠斯通电桥配置等问题,AMR传感器在出厂后,会存在电桥偏置。电桥偏置导致传感器感知外界磁场正常输出时也将偏置电压包含在内,使得输出不关于零点对称,经运算放大器将此微弱信号放大采集时不能充分利用运算放大器的输出范围,有的甚至超出范围,导致传感器的输出信号饱和截止,对于磁场的测量出现错误。
对于上述问题,国内外当前研究提出如下解决方法:电子科技大学采用可调电阻的并联电阻法,其优点是电桥平衡精度较高,缺点是需要屏蔽所有的磁信号干扰来筛选可调电阻,对环境要求较高;哈尔滨工程大学采用仪表放大器产生一个与偏置电压极性相反的电压来抵消电桥偏置的放大器偏压置零法,优点是不直接影响电桥性能,缺点是系统体积增大,成本增加;中北大学利用AMR传感器的专利偏置带并且设计Barber偏置电极来抵消电桥偏置,优点是增强了各向异性,提高了灵敏度,缺点是会在周期性使用过程中产生大量热量,增加传感器负荷,降低传感器性能;西北工业大学采用降低ADC分辨率来调节电桥偏置的动态范围,优点是不需改动硬件,缺点是增加了信噪比,降低了磁场测量精度凹。
本文提出一种基于AMR传感器SET/RESET功能的磁场精确测量技术。相比于以上方法,不要求测量环境,避免硬件操作,只在算法层面补偿数据,具有节省体积,降低成本,操作简易,精度较高等优点。
1AMR传感器存在电桥偏置的原因
AMR传感器由沉积在硅片上的坡莫合金(NiFe)薄膜组成磁电阻,并且沉积时外加磁场,形成易磁化轴方向,磁电阻与电流和磁化方向的夹角有关,表现为各向异性。正常情况下设计AMR传感器使其工作在线性模式,即磁阻相对变化率处于线性范围之内,则测量磁场值与传感器输出成正比例关系。依据以上原理,AMR传感器的惠斯通电桥结构如图1所示,VDD为桥臂供电电压,VOUT+和VOUT为桥输出节点电压。
根据图中惠斯通电桥结构示意图可以得到桥总的输出表达式即传感器差分信号输出为
理想情况下以惠斯通电桥配置设计的AMR传感器,其制造目的是创建4个电气性能相同的磁电阻,其空间对称桥臂的磁电阻受地磁场的影响相同,电桥的主体是两个分压器元件(即半桥),每个分压器元件在没有受到外界磁场感知时具有相等的电阻抗,每个半桥在其零点,每个分压器上的预期电压应为总桥电压的一半,因此VOUT+与VOUT-相等。而电桥偏置则是由于VOUT+与VOUT-存在偏差造成的,其原因为坡莫合金薄膜沉积到光刻区域的公差导致一些磁电阻误匹配,造成阻值不平衡。电桥偏置是输出节点上不期望输出的电压值,如果不进行补偿,会导致传感器系统性能的下降。
2基于AMR传感器SET/RESET功能的电
桥偏置消除原理及数据处理方法
基于AMR传感器的SET/RESET功能,向S/R+条接头的正向注入电流,激励使得磁畴对准易磁化轴正向,使得传感器电桥极性为正斜率,且正磁场在传感器轴上,从而使电桥输出接头之间电压为正电压,则此激励为SET(置位)脉冲:而向S/R+条接头的负向注入电流,激励使得磁畴对准易磁化轴反向,使得传感器电桥极性在正磁场且在传感器轴上的情况下为负斜率,从而使电桥输出接头之间电压为负电压,则此激励为RESET(复位)脉、冲。如图2所示为不同情况下的磁畴指向。
基于以上原理可知,AMR传感器的置复位功能使得传感器输出极性相反,并且不会改变电桥偏置的值和极性,在传感器的整个使用寿命过程中保持恒值。表达式如下式所示:
当传感器在置复位脉冲激励下输出均正常时,将式(2)中的两个式子相减可以得到磁场的大小,如下式所示:
从式(3)可以看出,磁场值的大小仅仅与灵敏度有关,与电桥偏置无关,避免了由于传感器受温度变化敏感而引起电桥偏置改变的情况。
将式(2)中的两个式子相加可以得到传感器电桥偏置的大小,如下式所示:
当传感器在置位脉冲激励下的输出饱和截止时,可以通过翻转复位脉冲激励下的输出求得准确的磁场值,如下式所示:
而当传感器在复位脉冲激勵下的输出饱和截止时,可以通过翻转置位脉冲激励下的输出求得准确的磁场值,如下式所示:
通过这种翻转的方式可以得到传感器单端饱和情况下在置位或者复位脉冲激励下完整,准确的输出,一方面避免了对于AMR传感器的调零操作和调零电阻不完全匹配带来的偏置不准确:另一方面只在算法层面进行数据处理补偿避免了硬件上对传感器进行操作,节省了体积,降低了成本;此外还能在硬件电路上保证不以牺牲信噪比为前提而降低传感器的性能。
3AMR传感器SET/RESET功能电路的设计
不同系列的AMR传感器SET/RESET功能信号要求不同。根据HMCl043芯片手册所述,置复位电流脉冲至少需要500 mA且持续至少2μs,而置复位电阻为2.5Ω,所以脉冲峰值在1.25V以上需持续最少2μs的时间才能足够置复位,根据以上要求并且运用电容充放电原理及其二极管的开关特性设计了如图3所示的SET/RESET电路旧。
图中的MAGRST端采用微处理器产生的PWM方波进行高低电平的控制,方波占空比为50%,在一个PWM周期,方波的上升沿即高电平使得Q2导通,Q1截止,电路对电容C1充电,使得SET/RESET端为低电平,则会在SET/RESET端产生正向电流,电流流经电阻条形成SET(置位)脉冲;而方波的下降沿使得Q1导通,Q2截止,电路对电容C2充电,使得SET/RESET端为高电平,则会在SET/RESET端产生负向电流,电流流经电阻条形成RESET(复位)脉冲,如此SET/RESET电路便可实现对传感器的周期性置复位激励,置复位信号输出如图4所示,脉冲持续时长占总脉冲宽度的20%。
4实验验证
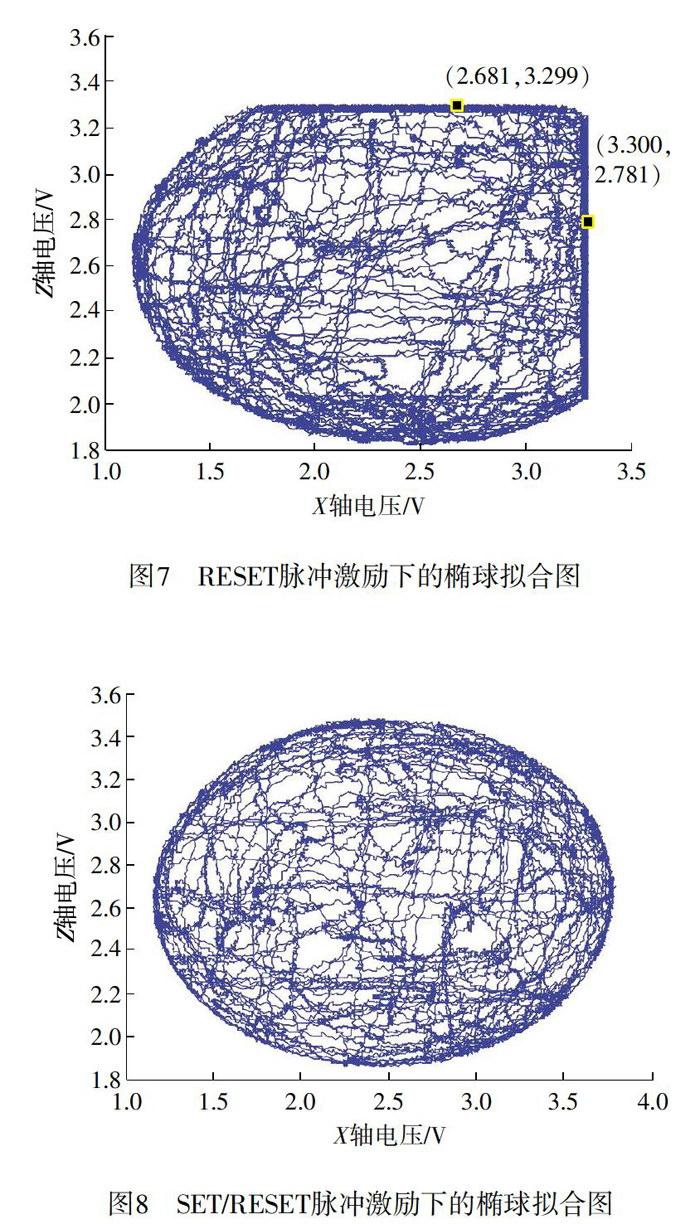
以HMCl043作为标定实验的AMR传感器组成测试系统,系统由STM32F405微控制器作为控制单元,为磁传感器提供周期性的PWM方波,方波控制SET/RESET电路对传感器进行周期性置复位脉冲激励,脉冲频率和MCU内置ADC采集传感器数据的频率均为2 kHz,则采样间隔为0.5 ms,首先将HMC1043三轴磁传感器置于磁屏蔽筒中,将起屏蔽作用的屏蔽盖都盖上,在零磁场环境下上电采集磁传感器的三轴电桥偏置,如图5所示。然后选择环境空旷且磁干扰较小的地方进行标定试验,采集数据进行椭球拟合,分别对比置位脉冲激励下的椭球拟合图,复位脉冲激励下的椭球拟合图,置复位脉冲激励下的经翻转补偿的椭球拟合图,如图6~图8所示。
从图6~图8 3种情况下的椭球拟合图可以看出,在置位脉冲激励和复位脉冲激励条件下,传感器输出X轴和Z轴均在3.3v饱和截止:而在置复位脉冲激励下经过电桥偏置补偿的椭球拟合图没有出现饱和截止现象,可以计算得到准确的零点和灵敏度参數,补偿电压值实现磁场值的准确测量。
5结束语
本文针对AMR传感器惠斯通电桥结构不平衡,当被测量磁场为零时,传感器半桥输出节点上的电压值不相等,存在电桥偏置,传感器信号经放大采集时出现饱和截止的问题,提出一种基于AMR传感器SET/RESET功能的磁场精确测量技术。实验结果表明当置位信号或者复位信号激励下磁传感器输出存在饱和截止导致无法正常测量磁场值时,采用这种技术进行数据的翻转补偿和电桥偏置的消除,可以得到传感器完整的磁测电压数据,进行椭球拟合标定求得零点和灵敏度参数,运用所求的零点和灵敏度在置复位功能条件下补偿传感器输出即可精确测量磁场。拓展了AMR传感器的应用环境,提高了传感器的系统性能。
(编辑:刘杨)
