推动手推车的力学分析
2018-05-14刘凝刘喜军
刘凝 刘喜军

[摘 要] 推与拉是一种常见的力学现象,在日常生活中人们也经常遇到。从早期的人力车、畜力车到爬陡坡用的双头机车,人们对推与拉哪个更省力都有亲身的体验。有趣的是,在教育的不同阶段,关于推与拉省力的问题有着不同的解释。在《推动手推车的力学分析》中,试图把理论分析与日常经验相结合,得出一个较为合理的解释。通过力学中的整体法,《推动手推车的力学分析》提出了在日常生活中“推比较省力”的观点。通过建立模型,进一步提出了在设定条件下“拉与推所用力相等”的观点。“拉比较省力”的观点,是初等教育背景下易得出的结论。“无法判断”拉与推哪种方法省力,是一个高等教育之上的问题,《推动手推车的力学分析》并不能找出實例,没有得出结论。
[关 键 词] 摩擦力;力学模型;连接体
[中图分类号] G642 [文献标志码] A [文章编号] 2096-0603(2018)13-0137-03
一、引言
2011年3月,笔者参加了“2011年第二十一届全国初中应用物理竞赛”。第一题是单项选择题,其中第2小题为工人师傅用手推手运送纯净水的图片(图1),对这两种方法中哪种方法比较省力的判断,下列说法中正确的是( )
A.图甲的方法比较省力
B.图乙的方法比较省力
C.图甲和图乙两种方法所用力的大小相等
D.无法判断
笔者选择了B,而竞赛后公布的标准答案是A。当时,参加完竞赛考试,回家后讨论了拉与推的问题;现在,笔者于大学四年级寒假期间,对拉与推的问题做了尽可能系统的分析,形成了更为全面的初步结论。
二、基于克服摩擦力的“拉的方法省力”
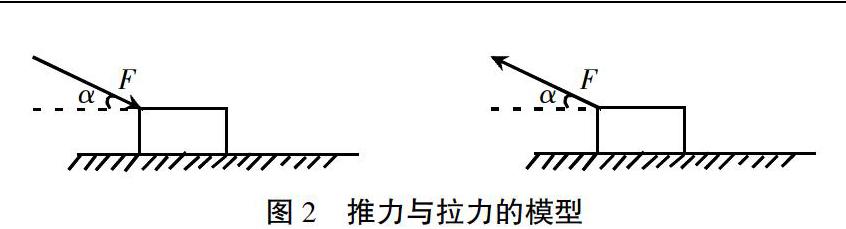
形成拉的方法省力的认识,肇始于对摩擦力的克服,需要有一个向上的分力。从向上分力有助于克服摩擦力的判断,得出拉的方法省力的结论。(图2)
三、基于克服阻力矩的“推的方法省力”
在使手推车运动的问题上,不是需要克服摩擦力,无论静摩擦力,还是动摩擦力;而是需要克服滚动摩擦,即需要克服滚动形成的阻力,克服阻碍手推车小轮滚动的力矩。使手推车运动的力大小,由阻力矩决定,不是由静摩擦力或动摩擦力决定。
同时,省力是对人而言,在使手推车运动的过程中,工人师傅付出的力的大小决定省力与否。在施加力于手推车之上时,存在重力问题。或者是手推车的重力由人承担,这相当于拉的方法;或者是人的重力由手推车承担,这相当于推的方法。判断拉的方法是否省力,需要比较手推车与人这两个相连的系统,看哪一个需要克服阻力的力更小。
一般认为,人的行走相当于多边形的滚动,步幅的一半相当于阻力矩。从工人师傅用手推车运送纯净水的情景看,手推车是运动在起伏较小的水泥(或沥青)路面上。手推车的阻力矩小于相当于步幅一半的人的阻力矩。得出手推车运动需要克服阻力的力更小,得出人的重力由手推车承担更省力,得出推的方法更省力。反之,得出人需要克服阻力的力更大,得出手推车的重力由人承担更费力,得出拉的方法更费力。
极端情况为,拉着手推车运动,向上角度增大,直到完全提起手推车,这相当于扛着手推车运动。推着手推车的极端情况为向下角度增大,直到完全压在手推车上,这相当于坐在手推车上脚蹬着地运动。
四、基于重心无起伏模型的“拉与推所用力相等”
在理想状态下,建立拉与推所用力相等的模型。
设路面无起伏,或者说起伏趋于无穷小。
对手推车,设定阻力矩为零,或者说趋于无穷小。得出重心运动轨迹与路面平行,得出手推车可以无阻力地运动。
对人的行走模型,具体如下:
(一)多边形模型
一般认为,人的行走相当于多边形的滚动。腿部被设定为单一刚杆。得出步幅的一半相当于阻力矩,阻力矩不为零,并较大。
(二)两截刚杆腿部模型
行走的多边形模型,其重心起伏较大,与实际行走情况差距较大,阻力矩太大。模拟实际行走,设置腿部为两截刚杆。以此平缓多边形模型的重心起伏,达到降低阻力矩的目的。
此两截刚杆腿部模型(设两截长度相等)的行走流程设定为:(1)起步。两大腿平行,与重力夹角30°;左小腿与大腿成直线,右小腿与左小腿夹角60°。重心在右腿上。(2)重心移动。重心向前移动,腿部改变夹角。直到左大腿与重力夹角30°,小腿与重力夹角30°;右腿成直线,与重力夹角30°。重心在左腿上。(3)迈步。右小腿向前迈步,与左小腿夹角60°。重心仍在左腿上。与起步对称。(4)重心移动。同(2),其中左腿变为右腿。(5)迈步。同(3),其中右腿变为左腿。
至此,经(2)重心移动—(3)迈步—(4)重心移动—(5)迈步,形成一个行走周期。接着可以继续此周期。(1)起步与迈步对接;行走终止可中止于一个周期的任何一个环节,最后还原为起步状态。
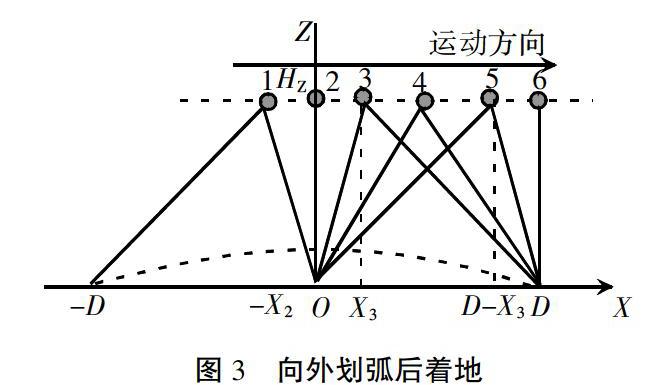
该两截刚杆腿部模型的局限性,一是在重心移动环节,没有设定“腿部改变夹角”的角度,无法避免重心起伏;二是在迈步环节,因为是简化模型,没有模拟人下肢的脚踝,迈步中表现为绕髋关节向外划弧后着地(图3)。
(三)连杆机构模型及拉与推手推车所用力相等
为克服两截刚杆腿部模型的局限性,建立连杆机构模型。
1.连杆机构模型的建立
两腿分别使用一套波舍利直线运动机构(Peaucellier-Lipkin linkage),或者霍肯直线运动机构(Hoeckens Linkage)。一腿的两个端点固定在躯干上,另一腿对称固定;轨迹为直线的点视为脚(图4)。
2.连杆机构模型的行走设定及效果
两腿交替行走,假设重心横向移动为零,最大步幅是以轨迹为直线的点的极限,步幅可以是极限内的任意长度,不限定每一步幅长度。
在以上设定下,连杆机构模型重心运动轨迹与路面平行,得出连杆机构模型的阻力矩为零,得出连杆机构模型可以无阻力地运动。
3.连杆机构模型推手推车的运动状况分析
(1)连杆机构模型增设手臂,推手推车时,设为单一刚杆,手掌摩擦力无穷大,单一刚杆可以从任意角度过手推车质心施力;拉手推车时,设为绳,绳可以从任意角度过手推车质心施力;无论推还是拉,连杆机构模型的手臂均具有单一刚杆及绳两个功能。(2)设手推车质量为m;连杆机构模型质量為M,自由落体加速度为g。对手推车所施的力为F,连杆机构模型脚部静摩擦力的反作用力为Ffoot,视为脚发力。手推车重力为Fgm,连杆机构模型重力为FgM。(3)对施力角度,建立平面直角坐标系XOY,设O为手推车质心,以X轴正向为0度,计算推车夹角θ。
在以上设的情况下,连杆机构模型推手推车的运动状况为:
Ffoot=Fcosθ (1.1)
Fcosθ=(M+m)a (1.2)
Ffoot==(M+m)a (1.3)
(1.1)表明脚部发力,与连杆机构模型推力Fcosθ相等。(1.2)表明M及m由连杆机构模型、手推车分别的承担力为多少,不影响运动状况;M与m之和作为确定值,共同影响影响运动状况。(1.3)表明脚部发力Ffoot,决定M+m的加速度a。
所以,发力大小及方向由Ffoot决定,F及θ只是传导机构,不改变Ffoot发力的大小及方向;Ffoot影响M+m的运动状况,决定a的大小。
4.连杆机构模型推手推车的省力状况说明
省力与否,决定于一定的Ffoot之下a的大小。前面已经有结论Ffoot=(M+m)a,一定的Ffoot产生确定的a,二者成正比。F及θ只是传导机构,不改变Ffoot发力的大小及方向,与省力与否无关。
区分推力角度不同的情况,具体说明如下:
(1)在第一象限,推力指向手推车质心O,与水平面呈一定角度θ(如30度)推车。部分M由手推车承担。(2)θ顺时针转,直到X轴正向,推力指向手推车质心O,以0度推车。Fcos0=(M+m)a,F=(M+m)a,a与F成正比,F对a的影响达到最大值,最省力。(3)θ逆时针转,直到90度。相当于坐。(4)θ逆时针转,过0度,反方向运动。(5)θ顺时针转,过90度,相当于拉。(6)θ顺时针转,过90度,直到180度。相当于扛。(7)θ顺时针转,过180度,反方向运动。(8)θ顺时针转,继续过180度,直到270度,反方向运动。同90度,但方向相反。(9)θ顺时针转,继续过270度,与(4)相同。
以上为全方位(角度)360度。
以上推改为拉,二者的结果是一样的。
俗话说:“背着抱着一般沉。”本文提出,在设定条件下,连杆机构模型拉与推手推车所用力相等,可推出一个匪夷所思的结论:“扛着坐着一般沉。”
实际中,列车在铁轨上运行,重心起伏较为平缓,机车施力于车辆,拉与推区别不大。
五、初步结论及未尽问题
对第一种情况“拉的方法省力”,本文简单明确了基于克服摩擦力,形成“拉的方法省力”的结论。对于第二种情况“推的方法省力”,本文分层次提出了重点。首先明确了阻力矩决定手推车运动的力。之后提出是否省力,需要比较手推车与人两个系统,看哪一个需要克服阻力的力更小。最后列举极端情况,扛着手推车与坐着手推车作比较。对第三种情况“拉与推所用力相等”,本文作了较为详细的分析。一方面说明在理想状态下,手推车可以无阻力地运动。另一方面,分析了人的行走模型,利用波舍利直线运动机构(及霍肯直线运动机构)建立了连杆机构模型,得出在设定条件下,拉与推手推车所用力相等的结论。最后,同样列举极端情况,机车在铁轨上拉与推车辆区别不大。对第四种情况“无法判断”拉与推哪种方法省力,笔者还不能提出实例,没有能够给出结论。
个人能力有限,此研究还有很多需要改进完善之处。如果将此问题展开研究是十分复杂的,例如,动摩擦如何向静摩擦过渡,以及影响动摩擦与静摩擦的参数有何关系,并且人所施加的力对它们有何影响,双足行走模型与现实的差别,加上脚踝后施力方式的改变,等等。
参考文献:
[1]哈尔滨工业大学理论力学教研室.理论力学[M].7版.北京:高等教育出版社,2009.
[2]李红征.小型双足机器人的行走研究[D].中国科学技术大学,2008.
[3]顾森.思考的乐趣[M].北京:人民邮电出版社,2012.
