DCS逻辑组态中时序问题的分析
2018-05-14
(国电重庆恒泰发电有限公司,重庆 400805)
分散控制系统(distributed control system,DCS)是以微处理器及微型计算机为基础,融合计算机技术、数据通信技术、CRT屏幕显示技术和自动控制技术于一体的计算机控制系统。由于其具有分散控制、集中操作、分级管理、配置灵活、组态方便等特点,使其成为火力发电行业控制系统的标配而得到了全面、广泛的应用。
笔者一直从事电厂DCS的维护工作。在工作中发现,工程师在进行DCS逻辑组态时,对逻辑时序的处理问题通常考虑得比较少,这无形中对DCS逻辑的正确执行埋下了隐患,最终可能导致事故发生。本文对DCS时序问题进行细致探讨。
1 控制周期和时序
DCS的控制循环通常是指把DCS完成一次从信号输入到控制运算再到控制信号输出这个过程,称之为一个控制循环。而完成一个控制循环所需要的时间,就是DCS的控制周期。在一个控制周期内,DCS将完成输入数据采集、控制策略运算、控制信号输出这一过程。
当然,较短的控制周期可以提高系统的可控性和控制精度,但这会增加控制器的硬件成本,同时也会加重硬件的运行负担,不利于系统的稳定。所以,工业生产控制领域在满足生产过程控制对象要求的同时,会兼顾以上两者,以得到最佳效果。
DCS控制器运行在实时操作系统上,控制器内的调度系统完成对任务的定时调度,可以认为DCS中控制器的控制过程是串行完成的,即在一个固定控制周期内,按顺序完成数据采集、控制策略运算、控制信号输出等过程。所以,时序也就是在DCS一个控制周期内完成一个控制循环时,各个环节执行的先后顺序。虽说DCS的这个工作顺序是固定不变的,但工程师在DCS中进行逻辑组态时,如果不考虑这个时序问题,任何情况下都用同样的逻辑算法块,最终得到的结果将会相去甚远。
2 基础算法
图1所示的算法块是一个模拟量切换算法。该算法块有模拟量A、模拟量B两个输入端,一个开关量D输入端,一个模拟量C输出端。模拟量切换算法块的功能是:当D=“1”时,C=B;当D=“0” 时,C=A。

图1 模拟量切换算法块
图2所示的算法块是一个模拟量加法算法块。该算法块有模拟量A、模拟量B两个输入端,一个模拟量C输出端。模拟量加法算法块的功能是:A+B=C。

图2 模拟量加法算法块
3 时序分析
3.1 开关量时序分析
图3是一个由T1,T2,T3三个切换算法块组成的模拟量选择保持算法。为简化分析,假设D1和D2始终等于“1”。

图3 模拟量选择保持算法块
1)DCS由上往下按照正常时序,依次对T1→T2→T3切换算法块进行运算,当D1=D2=D3=“1”时,则各切换算法块T1,T2,T3的输出分别为:
C1=C3′(T1当前时刻的输出等于T3前一个时刻的输出);
C2=C1(T2当前时刻的输出等于T1当前时刻的输出);
C3=C2(T3当前时刻的输出等于T2当前时刻的输出)。
由此得出C1=C2=C3=C3′,即切换器T3的输出等于T3上个控制周期运算所得结果。
2)DCS按照T1→T3→T2的顺序,对切换算法块进行扫描运算,当D1=D2=D3=“1”,则各切换算法块T1,T2,T3的输出分别为:
C2=C1(T2当前时刻的输出等于T1当前时刻的输出);
C3=C2′(T3当前时刻的输出等于T2前一时刻的输出);
C1=C3′(T1当前时刻的输出等于T3前一个时刻的输出)。
由此可以得出,切换器T3的输出等于T2上个控制周期运算所得结果,而切换器T1,T2的输出相等,且等于切换器T3上个控制周期的运算结果。
3)由以上关系式,列出图3逻辑组态中T1,T2,T3各切换算法块的输入/输出关系表(假设DCS开始执行运算时,输入信号A由0变为100,D1置“1”,保持该数值),见表1。

表1 各切换算法块输入/输出关系表
由T1,T2,T3切换算法块的输入/输出关系表不难看出,当时序为T1→T2→T3,所需要的输出结果C3保持了输入信号A的值;而当时序顺序为T1→T3→T2时,输出结果C3不仅没有保持A=100这一数值,反而在0~100不断跳变,致使输出呈现等幅震荡。
3.2 模拟量时序分析
图4所示为一个常用的,由3个加法算法块组成的升速率算法。同样,为简化分析,假定给定值A=100。
1)DCS由上往下按照正常时序,依次对 ADD1→ADD2→ADD3各加法算法块进行运算,则各加法块的输出分别为:
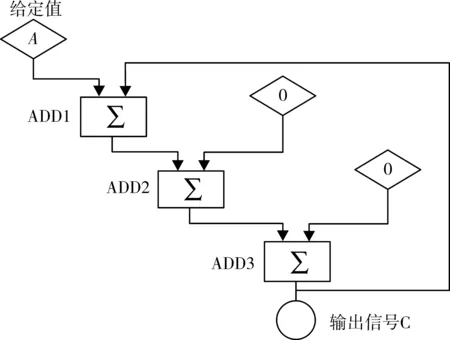
图4 升速率算法块
ADD1=ADD3′+A(ADD1的当前输出等于ADD3前一时刻的输出加上给定值A);
ADD2=ADD1(ADD2的当前输出等于ADD1的当前输出);
ADD3=ADD2(ADD3的当前输出等于ADD2的当前输出)。
由此得出ADD1=ADD2=ADD3=ADD3′+A,即加法块ADD3的输出等于ADD3上个控制周期的运算结果加上给定值A。
2)DCS按照ADD1→ADD3→ADD2的顺序,对加法算法块进行运算,则各加法算法块的输出分别为:
ADD1=ADD3′+A(ADD1的当前输出等于ADD3前一时刻的输出加上给定值A);
ADD2=ADD1(ADD2的当前输出等于ADD1的当前输出);
ADD3=ADD2′(ADD3的当前输出等于ADD2前一时刻的输出)。
3)由以上关系式,列出图4逻辑组态中ADD1,ADD3,ADD2各加法算法块输入/输出关系表(假设DCS开始执行运算时,给定值A同时由0变为100),见表2。
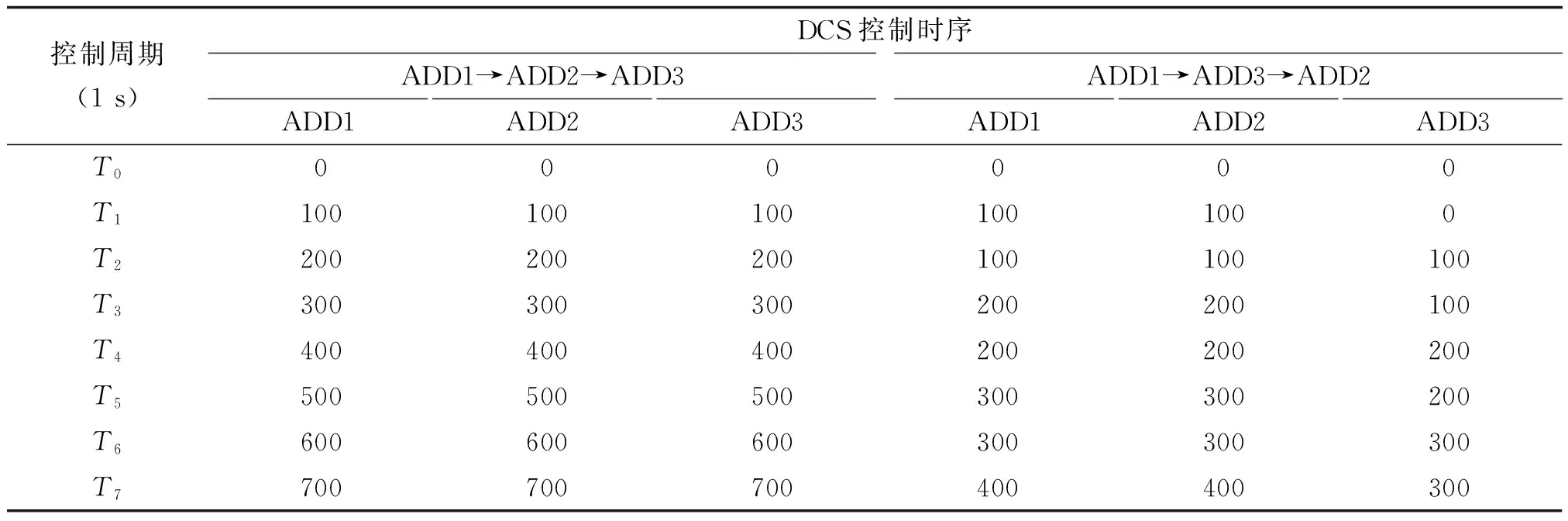
表2 各加法算法块输入/输出关系表
由ADD1,ADD3,ADD2各加法算法块输入/输出关系表容易看出,当时序为ADD1→ADD2→ADD3,输出信号C是按照给定值A=100的速率递增;当时序为ADD1→ADD3→ADD2时,输出结果ADD3虽然也在增加,但其输出速率远没有达到给定速率的要求,在第7个控制周期时,其输出速率仅有设定速率的43%左右。
3.3 工程案例
某电厂2#机组装机容量300 MW, DCS采用了国电智深NT系统,该系统通常情况下控制周期默认为1 s。2#机组自2006年投产发电后一直处于正常运行状态,但4年后出现了一次故障。当时2#机组满负荷,处于协调控制方式,所有运行参数均正常。约在15:28:21时,其中1台送风机跳闸,导致送风机RB动作,随后锅炉主控由自动切为手动方式,汽机阀门总指令则在15:28:21到15:28:22这1 s内从83.6%关至53.9%,最终导致锅炉超压,安全门动作,2#机组跳闸。当时的历史曲线记录见图5。
正常情况下,送风机RB动作后,控制方式应由协调方式自动切换为汽机跟随方式,即锅炉主控手动,汽机主控自动,以期达到由锅炉调节功率,汽机调节主汽压力的目的,使负荷快速平稳地由300 MW减至RB目标负荷150 MW。

图5 历史曲线记录
从图5中的历史趋势看出,15:28:21送风机RB动作,锅炉主控及时切为手动,15:28:22协调方式的已切除信号才发出,从而实现汽机跟随运行方式。也就是说协调方式延迟了1 s才切除,而此时汽机阀门总指令是送风机RB动作后,目标负荷自动给定150 MW,经汽机主控PID输出的结果。就是这1 s,导致汽机跟随运行方式延后了1 s才实现,最终造成了锅炉超压,机组保护跳闸。
事后通过进一步分析发现,这次2#机组非停正是在2#机组DCS逻辑组态时,相关逻辑时序问题没有做过多考虑而造成的一个严重后果。
4 结论
由此可见, DCS逻辑组态中时序问题至关重要。很多人认为DCS控制周期足够快,从而忽视了在DCS逻辑组态中对时序问题的细致考虑。通过以上分析发现,同样的算法块,如果采用不同的时序会得到完全不同的运算结果。这样造成的后果,轻者会使DCS的输出信号滞后一个控制周期,重者则会导致DCS逻辑保护误动、拒动,进而直接影响发电机组的安全运行。
为此,在进行DCS逻辑组态中,一定要对算法的时序问题引起足够的重视。要清楚被控系统的运行方式和运行要求,并结合控制逻辑图,知晓逻辑要实现的功能以及要达到的目的;同时,在DCS中进行逻辑组态时,同一逻辑图中不同算法块执行的先后顺序要合理排列,不同逻辑图的位号在DCS中按照执行流程要合理排序。尤其是在逻辑异动,需要在已有算法块中新增算法时,更需谨慎。最后,就是要尽量创造条件,模拟被控系统或设备的实际运行状况,做好相关试验,以此验证逻辑组态时序的正确性。
参考文献:
[1] 国家能源局.火力发电厂分散控制系统验收测试规程:DL/T 659—2016[S].北京:中国电力出版社,2016.
[2] 国家能源局.火力发电厂分散控制系统故障应急处理导则:DL/T 1340—2014[S]. 北京:中国电力出版社,2016.
[3] 何衍庆.集散控制系统原理及应用[M].2版.北京:化学工业出版社,2009.
