基于扩展卡尔曼滤波的无人飞行器姿态解算
2018-05-10赵佳吕弘周智恺冀明
赵佳 吕弘 周智恺 冀明


摘要
为解决无人飞行器姿态传感器低成本高精度的要求,引入扩展卡尔曼滤波器算法。该算法以低成本姿态传感器的角速度和加速度作为输入,实时解算姿态数据,有效地消除了无人飞行器运动过程对姿态解算精度的影响,实际飞行验证了该方法的有效性。
【关键词】扩展卡尔曼滤波 姿态解算 无人飞行器
1引言
自上世纪六十年代开始,军事组织、科研院所等学者就开始开展无人飞行器的设计、开发和研究,并随着控制技术、摄影技术、导航技术等不断发展,功能不断拓展,智能化程度不断提升,在战场监控、摄影摄像、地理监测、森林防火、农业植保等领域都有着广泛的应用,己成为目前各方研究的热点。
无人飞行器由于飞行环境复杂,自主飞行要求高,需要控制系统实时作出精确的判断并有效控制输出。姿态数据作为飞行控制的内环数据,对无人飞行器的精确控制起到至关重要的作用,它是保证无人飞行器稳定飞行的重要条件之一。因此,对于无人飞行器而言,高精度的姿态数据是必须的。然而,目前大多数无人飞行器尤其是民用级无人飞行器由于成本等原因,普遍采用低成本微机电惯性系统或其组合导航系统获取姿态数据。这为无人飞行器的姿态精确获取带来难度,由于姿态传感系统本身输出精度不高,直接输出无法满足控制的要求,需要通过算法提高姿态的测量精度。卡尔曼滤波算法尤其是扩展卡尔曼滤波算法(Extended Kalman Filter,EKF)为此类问题的解决提供了有效途径。卡尔曼滤波算法采用递推方式实现实时在线计算,在目标跟踪、模式识别、导航等领域有着广泛应用,然而,卡尔曼滤波器由于自身缺陷,无法彻底解决非线性的姿态解算问题。扩展卡尔曼滤波器则可有效解决此问题,并取得了不错的成果,但这些成果主要以理论研究和仿真为主,较少考虑实际飞行使用等情况。
据此,本文提出将扩展卡尔曼滤波算法应用于低成本姿态传感器的姿态解算,并通过某型无人旋翼飞行器的实际飞行试验验证本方法的有效性与合理性。
2扩展卡尔曼滤波器姿态解算
扩展卡尔曼滤波器的解算过程和迭代方式与卡尔曼滤波器相同,其基本解算流程如图
1所示。
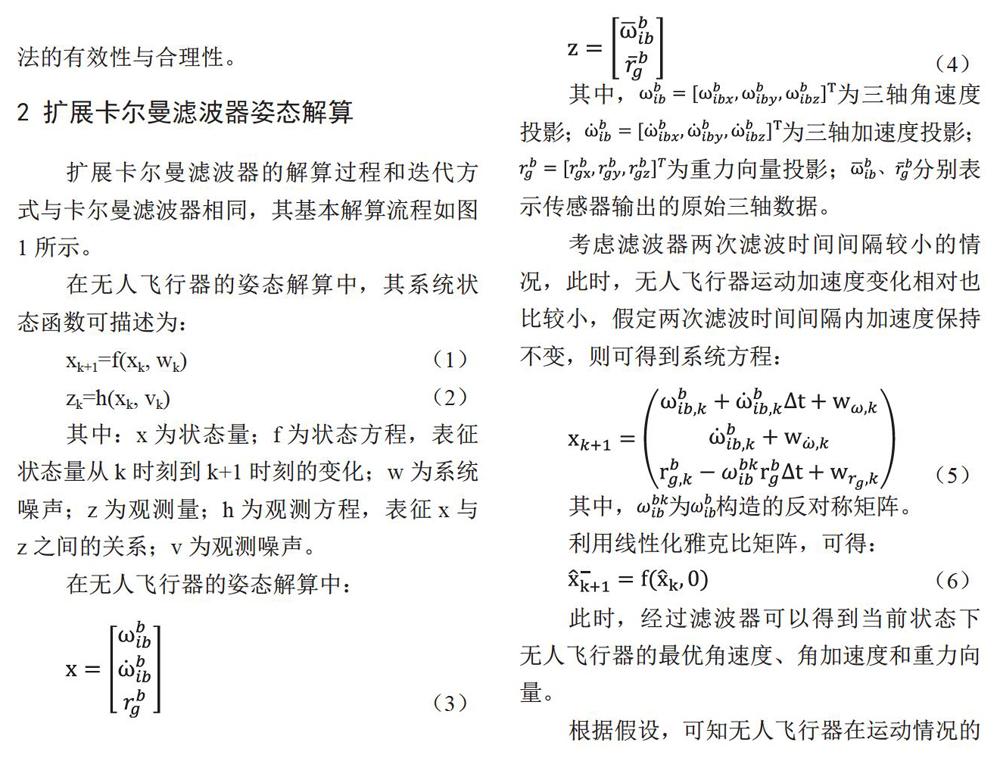
在无人飞行器的姿态解算中,其系统状态函数可描述为:
xnl=f(xk,Wk) (1)
zk=h(xk,Vk) (2)
其中:x为状态量;f为状态方程,表征状态量从k时刻到k_l时刻的变化;w为系统噪声;z为观测量;h为观测方程,表征x与z之间的关系;v为观测噪声。
在无人飞行器的姿态解算中:
其中,
T为三轴角速度投影;
]T为三轴加速度投影;
为重力向量投影;wbib、rbg分别表示传感器输出的原始三轴数据。
考虑滤波器两次滤波时间间隔较小的情况,此时,无人飞行器运动加速度变化相对也比较小,假定两次滤波时间间隔内加速度保持不变,则可得到系统方程:其中,wbkib为wbib构造的反对称矩阵。利用线性化雅克比矩阵,可得:Xk+l= f(xk,0)
(6)此时,经过滤波器可以得到当前状态下无人飞行器的最优角速度、角加速度和重力向量。
根据假設,可知无人飞行器在运动情况的加速度和重力加速度之间关系为f=-g。将g单位化,则
由此可得,无人飞行器姿态角为:
滚转角:Roll=atan(-)
俯仰角:Pitch= -asin(egx)
3飞行验证
选择某型旋翼无人飞行器作为验证对象,该无人飞行器搭载法国SBG的IG-500N微机电组合导航系统,测试飞行器如图2所示。
在实际飞行情况下,以此传感器输出的三轴角速度、加速度作为扩展卡尔曼滤波姿态算法的输入进行姿态解算,获得姿态数据,同时输出该传感器在组合导航下的高精度姿态数据,两者进行比较,验证算法的有效性。
图3.图5为在实际飞行情况下,俯仰角和滚转角的跟踪情况,以及两者的误差曲线。由图可知,在整个飞行过程中,扩展卡尔曼滤波算法获得的姿态数据与传感器组合导航下获取的数据一致性较好。俯仰角和滚转角的最大误差分别为0.69°和0.85°,均方根误差分别0.12°和o.18°考虑到此无人飞行器为油动,本身振动较大,且最大误差出现时,无人飞行器实际飞行最大俯仰角和滚转角分别为10.9°和-10.3°。因此所获得的姿态数据完全可以满足实际飞行需求,算法有效。
4结论
为解决无人飞行器姿态传感器低成本高精度的要求,采用扩展卡尔曼滤波器算法,有效地解决了无人飞行器运动过程对姿态解算精度的影响,并以旋翼无人飞行器为例,验证了算法的有效性。下一步将开展固定翼无人飞行器的姿态解算效果验证,以确定解算的稳定性、一致性和可推广性。
参考文献
[1]孙罡,低成本微小型无人机惯性组合导航技术研究[D].南京理工大学博士学位论文,2 014,6:4-6.
[2]申星,面向小型无人飞行器的SINS/GPS纽合导航系统研究[D].浙江大学硕士学位论文,2 012,5:13-2 0.
[3] Kumar N S, Jann T. Estimationof Attitude from a Low-costMiniaturized Inertial PlatformusiingKalman Filter-base SensorFusion Algorithm[J]. Sadhana,2004, 29 (2): 217-235.
[4]L1 W, Wang J. Effective AdaptiveKalman Filter for MEMS-IMU/Magnetometers Interated Attitude andHeading Reference Sys tem [J]. Journalof Navigation, 2012,1(1):1-15.
[5]付梦印,邓志红,闰莉萍.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010.
[6]秦永元,惯性导航(第二版)[M].北京:科学出版社,2014.
