某型直升机飞控系统故障诊断的研究
2018-05-10罗慕成林雨生
罗慕成,李 波,林雨生
(中国直升机设计研究所,江西 景德镇 333000)
0 引 言
随着直升机技术的发展和对直升机性能要求的不断提升,对直升机飞控系统的要求也越来越高。飞行控制系统的作用是控制直升机的飞行,起着阻尼、增稳和控制增稳等作用,可以提升飞行员对直升机的操控能力,减轻飞行员的工作负担,增加机动性和稳定性,影响整个直升机飞行的品质和安全性。同时,直升机飞控系统的稳定性对直升机的安全性至关重要,因此,飞控系统的故障检测与诊断技术以及故障容错技术的研究一直得到广泛关注[1]。容错控制与精确控制也是直升机可靠飞行的基本前提。目前,飞控系统故障诊断常常是通过相关设计人员在现场进行判断,这种故障诊断的方式花费时间较多。
直升机飞控系统故障诊断的研究方向有很多,如根据先验知识进行判定,基于模型的故障诊断方法等。故障诊断的专家系统方法属于一种根据先验知识进行判定的方法,这种方法不需要得到系统的定量模型,也不需要得到故障特征值的先验知识,实际系统有时难以得到准确的模型以及本身的不确定性,而故障诊断的专家系统方法可以不需要系统的精确模型,因此有着其特殊的优势[2]。基于状态估计的故障诊断方法属于一种基于模型的故障诊断方法,其基本思想是通过状态观测器重构系统的状态,然后与实际测量的状态与重构系统得到的状态进行对比得到残差。正常没有故障时残差应当是趋于零的,发生故障时残差将明显的偏离零值,而且对应于不同的故障,残差将有不同的表现形式,根据不同的残差状态,可以推导出相应的故障[3]。
笔者提出了一种故障诊断系统,通过接受机上的信号,利用控制及测试计算机各功能模块和测试控制软件,对信号滤波、调理、转换、计算和分析,实现对飞控计算机内部各功能板卡、飞控系统其它部件、以及交联设备的检测,实现飞控系统故障激励、定位,并显示测试结果。同时研究了基于模型的故障诊断技术,对直升机的执行器的某一常见故障进行诊断分析,实现了故障检测[4]。
1 飞控系统概述
直升机的飞控系统是一个比较复杂的系统,包含了许多部件。在实际的故障检测中,可以对检测的内容分为直升机控制计算机,飞控系统相关部件如传感器、执行机构如舵机等,以及相关功能的按钮和指示灯。此外,由于飞控系统交联的部件比较多,为了提升飞控系统故障诊断的效率,往往会对与飞控系统交联的部件进行故障分析。
根据经验,实际中对直升机飞控计算机进行的检测主要是针对飞控计算机内部功能板卡,如飞控计算机CPU板,飞控计算机总线板,飞控计算机离散量板,飞控计算机模拟量板等。
对飞控计算机CPU板可进行的故障检测内容有CPU指令测试,FLASH测试、RAM测试、看门狗测试、电源中断测试等。对飞控计算机总线板可进行的故障检测内容有429双口RAM测试、422双口RAM测试等。对飞控计算机离散量板进行的故障检测内容有输入激励测试、输出回绕测试、电源监控测试、通道故障逻辑监控等测试。对飞控计算机模拟量板进行的测试有模拟量输入激励测试、模拟量输出回绕测试等。根据测试结果可得相应的板卡是否出现故障。
飞控系统部件主要出现可能的故障有,绞车操纵杆,速率陀螺组、驾驶杆和各通道的舵机等装置。飞控系统交联设备主要可能出现的故障有,大气数据测量系统,供电电源等。实际的故障测试需要分别对各部件进行检测。
故障诊断系统属于直升机的一种保障设备,借助故障诊断系统,维护人员可以对飞控系统进行故障检测。定位了故障后,可以将飞控系统的故障定位到具体的部件,根据该部件的损坏情况判断是否可以现场更换,或者是否需要将直升机返回生产厂家进行维修。同时需要进行交联系统特性测试,提高故障检测率。故障检测是飞控系统上电自检测和飞行前自检测的必要补充。根据上文分析,为了操作方便,故障诊断系统可以采用全面的测试以及各分项选择测试。通过全面测试可以对飞控系统及其交联设备的相关项进行故障诊断,大体定位到故障出现在哪一项;分项测试是可以有针对性的对某一项目进行测试,能得到更为详尽的结果。
飞行控制系统是利用控制律参数解算来达到控制飞行的目的,参与解算的参数包括给定的控制输入信号、传感器测量得到的当前飞行状态等参数,最终给到执行机构如舵机控制直升机的飞行。执行机构的故障诊断至关重要,下文研究基于模型的故障诊断技术,对直升机的执行器的停转故障进行故障诊断。
2 基于模型的故障诊断
某型直升机飞控系统设备及与飞控系统交联的设备较多,根据试飞经验,传感器故障、执行器故障以及控制器或接口故障属于常见的故障。本文针对执行器的故障检测进行研究,研究的前提是飞控系统其它部件不出现故障。
简化后的直升机增稳系统是由传感器、执行机构、控制器以及直升机本体所构成的闭环回路,是一个复杂的动力学系统。为了对直升机的增稳系统进行故障诊断研究,本章首先介绍了直升机增稳系统的各组成部分及其数学模型,本文研究的是执行机构故障检测,因此对传感器及其他部件进行简化处理,并假定其不出现故障,然后对执行机构可能发生的故障进行了分析及建模。在此基础上,采用MATLAB/SIMULINK搭建增稳系统完整的仿真模型。
2.1 直升机增稳系统模型
本文分析三自由度直升机模型系统特性。执行机构简化为作动器,测量机构为陀螺及光纤惯导和加速度计。框图如图1所示。

图1 直升机增稳系统框图
直升机的飞行动力学参数可以通过直升机真实空速、重量、机身结构、旋翼、垂尾、平尾等进行换算得到。直升机气动力学描述了直升机的姿态运动与各种环境力矩和控制力矩的关系。由于仅考虑刚体直升机模型,因此忽略其他附件的影响。本文研究的直升机模型处于悬停状态,重量为1.3 t,悬停高度20 m,正常重心。该状态下的直升机数学模型可描述为:
式中:A,B见附录,C为单位矩阵。该线性化的模型具有4个输入量,4个输出量,9个状态量。输入向量的顺序为驾驶杆纵向操纵位移,驾驶杆横向操纵位移,总距杆操纵位移,脚蹬操纵位移。状态变量的顺序为偏航角,俯仰角,滚转角,机体偏航角速率,机体俯仰角速率,机体滚转角速率,机体纵向速度,机体横向速度,机体垂向速度。因为本文研究对象是悬停状态时的直升机模型,因此初始状态各轴速度,角速率和角度均为0。
2.2 直升机增稳系统执行器故障分析及建模
本文研究的对象是直升机飞控系统执行器的故障,首先对故障进行建模分析。执行机构由舵机与助力器组成,由控制器及伺服放大器提供执行机构的输入信号。执行机构在长期运行过程中,很可能发生故障。其常见的故障模式主要有三种:卡死、执行机构效率比例下降、摩擦力矩增大故障[5]。
(1) 卡死,也称为停转。
可描述为:
式中:uout(t)为执行机构的实际输出;uin(t)为执行机构的正常情况下的输出;tf为故障发生的时刻。
(2) 执行机构效率下降
故障模式可表示为:
uout(t)=αuin(t)
式中:α为恒定增益变化的比例系数,即相比于期望输出力矩按比例减小。
(3) 执行机构摩擦力矩增大故障,其数学模型可描述为:
uout(t)=uin(t)+f(t)
式中:f(t)为故障函数,即相当于增加了一定的力矩。
2.3 直升机增稳系统的仿真
2.3.1直升机增稳系统无故障仿真
控制器采用传统的PID控制,保证直升机三轴稳定飞行,在MATLAB/SIMULINK环境下搭建直升机增稳系统完整的仿真模型,分析的模型选定为某型直升机在20m悬停时的运动模型,重量为10 t。在没有操纵的情况下,给俯仰轴一个三角波的扰动输入,峰值为5,时间长度为2。得到直升机的三轴角度和角速率变化如图2~4。
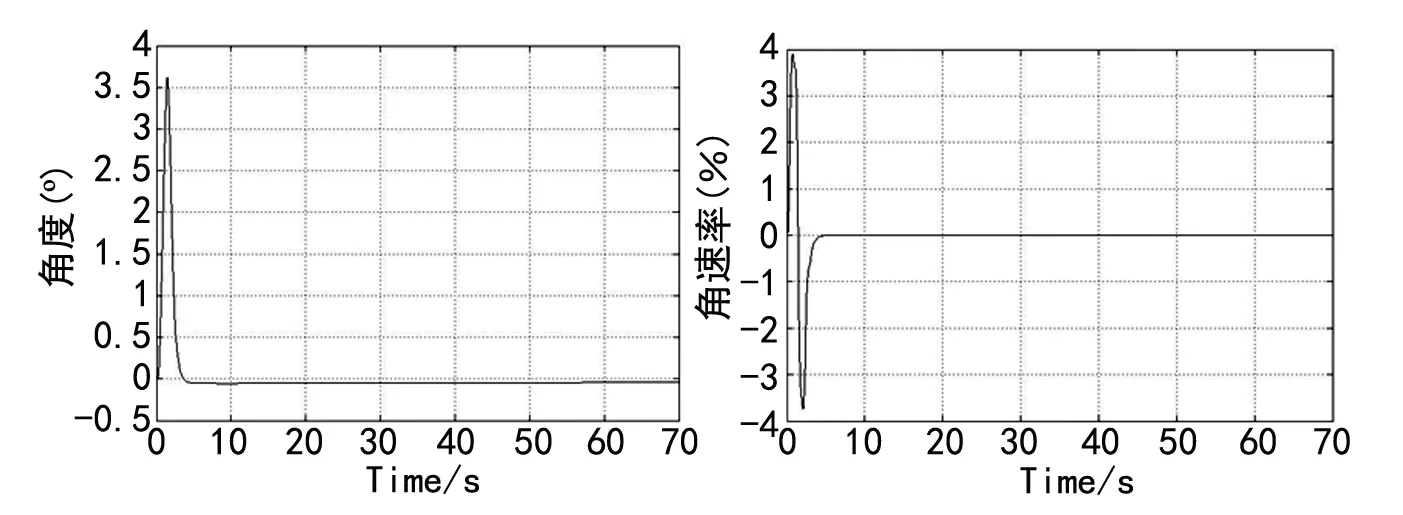
图2 俯仰角/俯仰角速率
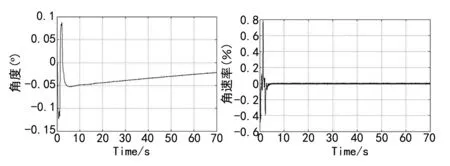
图3 横滚角/横滚角速率
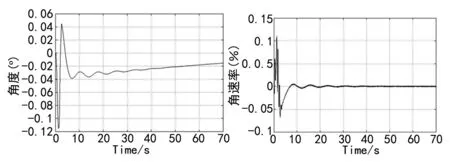
图4 偏航角/偏航角速率
从图中可以看出,在控制器的作用下,直升机是稳定运行的,随着时间增加会有一定的波动,这是正常的,控制器能将直升机在一定范围内稳住,当过一定时间,直升机有一定的偏差时,飞行员可根据实际的状况操纵直升机,飞控系统做到了减少飞行员工作量的工作。
2.3.2直升机执行器的故障仿真

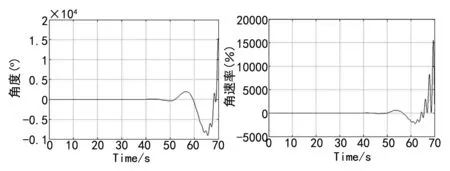
图5 俯仰角/俯仰角速率

图6 横滚角/横滚角速率

图7 偏航角/偏航角速率
从仿真结果可得,俯仰轴执行器发生停转故障影响了直升机的稳定飞行,最终直升机俯仰轴会稳不住并发散,并且由于俯仰轴的影响,导致偏航轴和滚转轴也受到了影响,最终都走向了发散,发散程度较大,通过操纵驾驶杆无法稳定直升机。
根据上述仿真表明,直升机在无故障时,所设计的控制器可以将直升机在一定范围内稳定住。当直升机执行机构出现停转时,系统的某些状态变量发生了变化,导致直升机不稳,有明显的发散并失控。
3 执行机构的故障诊断
3.1 故障检测观测器的设计
为简化设计,本系统的干扰项忽略不计。考虑如下线性系统:
当出现故障时,上述线性系统可表示为:
式中:x(t)、u(t)、y(t)分别为线性系统的状态变量、输入向量和输出向量;A,B,C为有相应维数的矩阵;f(t)为故障函数;F为故障分布矩阵。
其满足如下条件:
(1)A(x,t)是在一定范围内具有lipschitz常数γ的线性函数项,存在γ>0,使得:
(2) 系统可能发生的故障及其变化率是有界的,即:
直升机运行的姿态角一般满足lipschitz条件,否则姿态变化过大容易控制不住,出现安全隐患。在此处假设故障及其变化率也符合工程预期,因为执行器运动范围是有限的,而且由于液压舵机突变速率也不可能过快,因此变化率也会有一个最大值。
设立故障观测器如下:



定义状态估计误差为:

输出残差为:
当发生故障时,系统模型发生变化,基于无故障系统建立的故障检测观测器将失去对系统状态的有效跟踪。输出残差将发生较大变化,由此,可采用故障检测函数d(t)=εT(t)∧ε(t)来进行故障检测,其中∧为单位阵。选取适当的增益矩阵L,利用变量间瞬态关系集合来进行故障诊断,当无故障时,可以使设计的观测器跟踪系统状态的跟踪精度保持在一定的精度范围内,当出现故障时,系统模型发生变化,故障观测器无法正常跟踪系统状态,表现的形式是当ε(t)显著超过零值时,表示有故障,当接近零值时,表示无故障。
3.2 仿真分析
以执行器的卡死故障为例,仿真分析故障观测器的工作情况。当直升机未发生故障时,故障检测函数d(t)输出如图8所示。
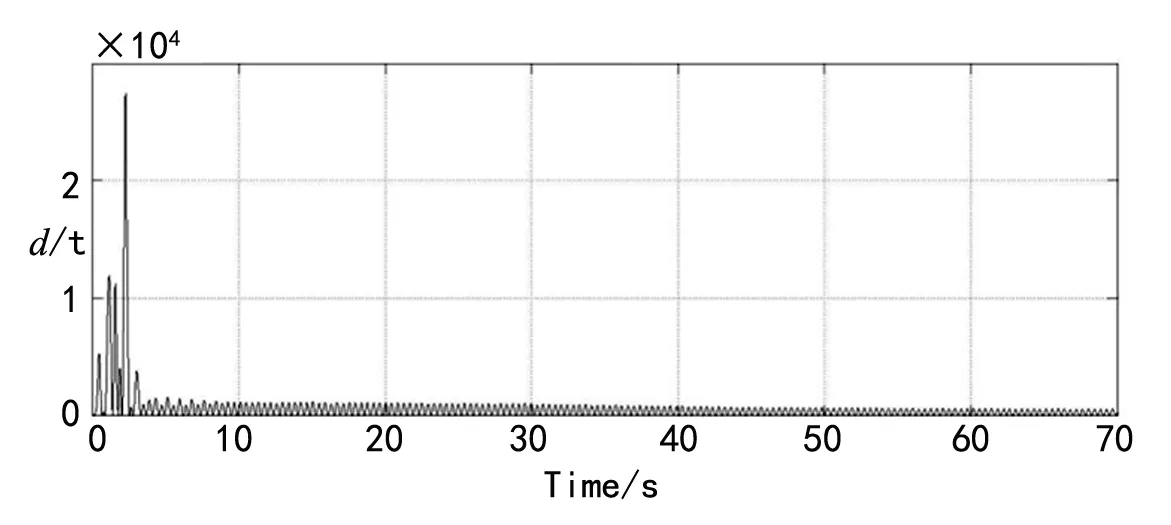
图8 故障检测函数d(t)输出
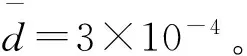
图9 故障检测函数d(t)的输出
可见,故障检测观测器明显偏离了0值,检测出了系统发生的故障。
4 结 语
传统方法对直升机飞控系统的故障诊断需要的人力成本比较高,浪费了大量精力,有时得到的结果还不准确。故障诊断技术的研究能减轻设计人员的负担,也可以提高故障检测的准确性。本文对常见的故障诊断做了简单的总结,并提出了一些可行的诊断方法,通过仿真验证了故障检测器的可行性。
参考文献:
[1] 刘京津.基于滑模观测器的故障诊断技术及其在飞控系统中的应用研究[D].南京:南京航空航天大学,2008.
[2] 吴今培.智能故障诊断技术的发展和展望[J].振动、测试与诊断,1992(2):79-86.
[3] 程 瑶.基于模型的卫星姿控系统故障诊断[D].哈尔滨:哈尔滨工业大学,2012.
[4] Guo Y Y,Jiang B,Zhang Y M,et al. Novel Robust Fault Diagnosis Method for Flight Control Systems[J].Journal of Systems Engineering and Electronics Vol.19,No.5,2008,pp.1017-1023.
[5] 李 洁,姜 斌,刘春生.基于神经网络模糊观测器的飞控系统故障诊断和故障调节[C].中国控制会议,北京.2010.
