电动助力载物爬楼小车设计
2018-05-10王彦磊武建新朱吉魁方海旺
王彦磊,武建新,朱吉魁,方海旺,陈 涛
(1.内蒙古工业大学 机械学院,内蒙古 呼和浩特 010051;2.内蒙古伯邦科技开发有限公司,内蒙古 呼和浩特 010051)
0 引 言
在现代生活环境下,楼房是大多数人的主要居住场所,随之而来的是在负重的情况上下爬楼不便。楼梯是人类自我创造环境中最常见的阻碍行动不利场所。尤其是在一些低层楼房中,又没有电梯,就一些大件或重件的物品往楼上搬运造成了极大的困扰。
爬楼机器人或爬楼小车是目前自主或辅助爬楼的的主要工具,载物爬楼小车的课题研究主要是解决当前靠人力无法搬运或难以搬运的货物运送上楼,载物爬楼小车可应用于很多环境中,有深远实际应用意义[1]。
1 载物爬楼小车的工作原理
电动助力载物爬楼小车工作结构简图如图1,基于导杆机构的优缺点,在研究的过程中,主要采用减速器与四杆机构复合的结构,所研究产品时主要由四杆机构来完成爬升楼梯,以及减速器的调节速度和机身本身架构的零活性来满足使用者的需求。助力小车的摆杆摆动在一定工作空间内可以越障,具有较强的上下台阶能力和翻过障碍的优良性能[2]。
主要功能是辅助人力运载货物爬楼,实现在不费力的情况下使重物快速上下楼,其中关键技术机构就是一个四杆机构,可以在小车每上一个台阶后由该机构旋转一周与台阶接触一次以抬起重物上一台阶。小车平稳运行,以保证货物和人员的安全。
电动助力爬楼小车可分为三种状态:爬升楼梯、平地直线人力推行、平地推行转弯。

图1 小车结构简图
2 载物爬楼小车总体设计方案
2.1 载物爬楼小车的发展现状
到目前为止,我国国内对助力爬楼小车课题的研究相对国外就要落后了许多。虽然到现在为止有了较多的专利申请和研究成品,但是因为各方面的原因,环境的不同,质量,重量,楼梯攀升角度的的性能的限制,至今还没有丰富的产品可供国人购买应用。
2.2 载物爬楼小车的结构设计方案
电动助力载物爬楼小车适用于需要上下楼梯搬运大件货物,使其可以在没有在楼梯方便的的楼上爬升搬运货物。电动助力爬楼机需要一个循环的支撑系统,可在楼梯上爬升的车架,和可以在平地上推行的一对车轮,电源控制按钮和手持推行操作握杆上的安装高度要符合人体工程学[3]。如图2为载物爬楼小车的装配图。
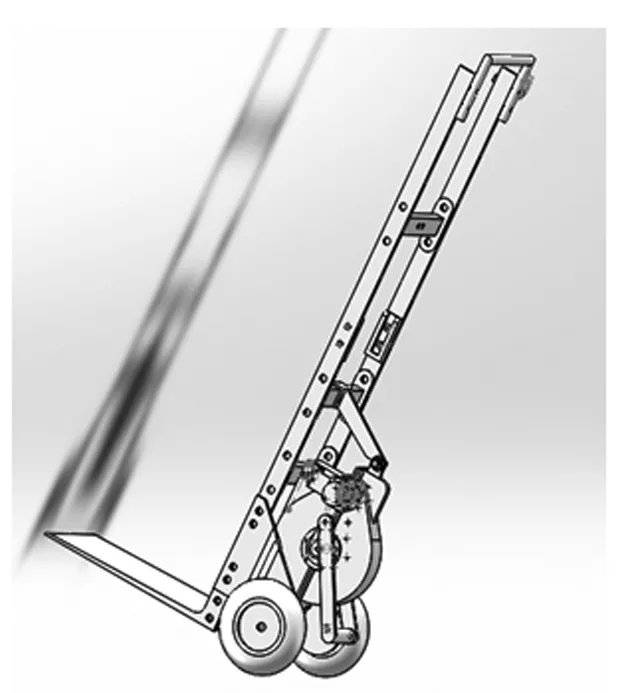
图2 四杆机构爬楼小车3维装配图
电动助力爬楼小车由一个直流电机驱动,由离合器和减速器传动,保证小车在爬升楼梯时可以平稳运行。动力来源是一个可充式等的蓄电电池,电池可取出更换或充电。充电状态可以在车架上的指示灯显示。
主要是通过辅助人力实现楼梯攀爬动作要求,以减轻人力,减少劳动强度,提高上下楼梯搬运货物的效率以及安全性,需要设计一个安全可靠辅助人力搬运货物的电动助力爬楼小车。
由直流电机驱动,驱动电机通过离合器,再由减速箱进行减速,减速箱将较低的转速专递到给机构传动系统,由机构传动系统将输出转速传到执行元件,从而实现助力爬楼小车的上下爬楼[4]。如图3就是爬楼小车设计时的所需要考虑到的几个部件,图示的依据动力传递方向来分析设计的,其主要功能是在其执行元件部分完成。

图3 主要功能实现动力路线图
3 载物爬楼小车的控制传动系统设计
传动机构是本次设计过程中的难点也是重点,选用直流电动机,通过离合器空中四杆机构的运作,每转一周将货物抬高一个台阶,由于电机转速抬高,又通过一级减速器降速,使上升速度在2~3 s一个台阶,达到运作平稳,操作省力的目的。
如图4所示为滑块四杆机构结构简图,从电动机出来跟一离合器相连,离合器由操作人手动控制,实现人按下按钮离合器吸合,通过一级齿轮减速器降速带动滑块机构运动,在曲柄旋转一周将带动摇杆摆动一次,也就是可是实现摇杆接触台阶将货物抬起上升一个台阶,以此循环,即可完成将货物运送上楼。
采用导杆机构做为行驶系统的爬楼车辆。该车辆在行驶过程中,可通过导杆支撑地面实现爬楼越障功能。
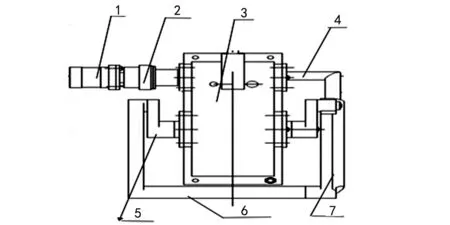
图4 小车动力传动原理简图1.直流电机 2.转离合器 3.减速器 4.摆杆 5.摇杆 6.支撑杆 7.活塞杆
4 结 语
为了考虑到机器的可靠性和经济性,避免在规定的使用时限内失效,要做到定期检查与维修,保证完成工作任务的前提下正常运行[5]。
因为电动助力载物爬楼小车的负载不是很重、工作转速低、设计的四杆机构爬楼小车采用的润滑方式是脂润滑,其具有好的密封性功能,大大可以避免或减少外部环境的污染,如灰尘、潮湿的空气等恶略环境对轴承以及齿轮啮合的影响。
参考文献:
[1] 董爱华,杨富超.轮式机器人爬升性能影响因素的分析研究[J].河南机电高等专科学校学报,2009,17(2):15-17.
[2] 乔凤斌,杨汝清.六轮移动机器人爬楼梯能力分析[J].机器人,2004(4):301-305.
[3] 孙婧民.机械优化设计[M].北京,机械工业出版社,1990.
[4] 金 龙.新型移动机器人的结构设计及性能分析[D].武汉:武汉理工大学,2009.
[5] 冯清秀,邓星钟.机电传动控制[M].第五版.武汉:华中科技大学出版社,2011.
