欧洲猫V5系统多监视源数据融合处理
2018-05-08邹继科
邹继科
摘要 现中南地区自动化主用系统采用欧洲猫v5系统,经多监视源数据处理器MST (Multi-SensorTracking Function)对收到的A/C模式雷达数据进行处理,产生欧洲猫系统综合航迹。根据民航局统一部署,后续将引接S模式雷达及ADS-B信号进行融合处理。本文将对中南地区目前雷达融合情况及后续多监视源数据处理进行综合分析。
【关键词】欧洲猫 MST 雷达 融合处理
1 前言
中南地区自动化欧洲猫V5系统采用双机冗余MST服务器对A/C模式雷达进行融合处理,产生系统综合航迹。在多路A/C模式雷达进行融合处理的过程中,MST先对每部雷达进行预处理及BIAS修正。当雷达对飞机的位置进行测量时,在方位角和距离上定会存在一定的偏差。因此对雷达数据需要进行一定的BIAS补偿,使其更趋近于飞机的实际位置。方位角和距离的补偿值有两种模式,一种是手动模式,即设定一个固定值的BIAS数值,在融合计算时始终按此值进行补偿;另一种是自动模式,即依靠系统中算法固定周期选取10个点迹报告,计算一次BIAS数值,作为动态调整的参数。BIAS数值的选取不合理会导致对此雷达信号修正的不准确,当系统航迹使用此雷达航迹更新时,即会造成偏差,从而导致矢量线摆动或者假信号的问题。可见BIAS的修正对雷达信号处理十分必要。
2 多监视源数据融合处理
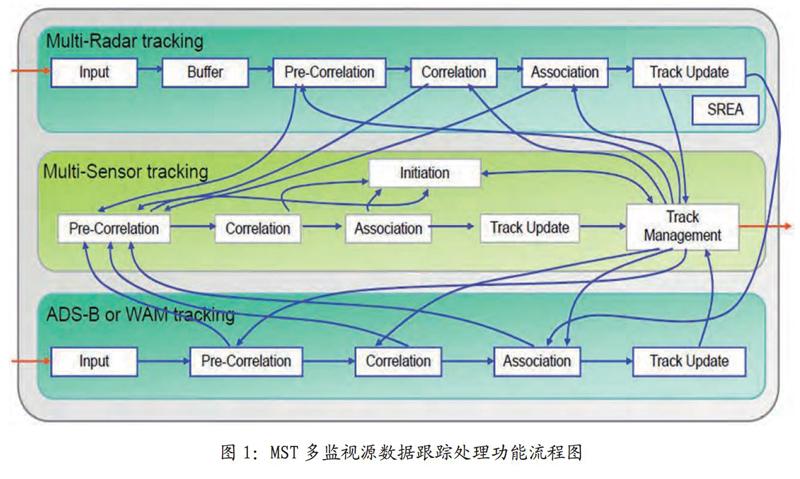
MST多监视源数据跟踪处理器可以处理AiC模式雷达数据、S模式雷达数据、ADS-B数据以及WAM报告。MST先对收到的各项监视源信息进行预处理,主要是对各监视源的报告信息进行检查,查看报告信息的完整性,并检查报告信息与系统航迹是否匹配。经过MST预处理,多监视源数据信息开始进行融合航迹运算,不同的数据源信息输入系统,同时更新系统航迹。处理流程如图1所示。
根据MSTS多监视源数据跟踪处理功能流程图分析,系统收到雷达航迹( Multi-RadartracHng),首先进入Buffer缓冲处理,即将雷达覆盖的区域分成点迹扇区和航迹扇区。通过接收到雷达点迹的位置,判断其参与计算的航迹扇区,并最终进行雷达航迹融合计算。
如图1所示,参与系统融合处理的雷达航迹( Multi-Radar tracking)、广播式自动相关监视ADS-B报告、广域多点定位(WAMtracking)报告等多监视源数据信息,均经过Pre-Correlation预相关处理。预相关处理是将点迹、航迹信息进行粗略分类的阶段,即将同一或相邻的点迹扇区内的点迹,参与同一航迹扇区内的航迹计算。实现多个相关点迹与多个相关航迹对应。预相关处理是多监视源数据融合处理的初步计算,条件选择相对宽泛,主要目的是滤除多监视源送入的无相关的点迹报告,减少系统运算成本,便于MST更高效完成数据融合处理。
预相关处理是多点迹对多航迹的相关,要进行更准确地关联运算,下一步将进行相关处理( Correlation)。相关功能会对点迹和航迹进行配对可能性计算,产生匹配可能性的评估值,评估值反映了航迹与点迹匹配程度。通过评估值比较,计算出一个点迹最具可能性匹配的三个航迹,或一个航迹最具可能性匹配的三个点迹。剩余淘汰掉不相关的点迹,将送回Pre-Correlation预相关进行重新处理。
配对处理(Association)关联功能,是将点迹和航迹进行1对1判断匹配的重要过程。主要目的是为了解决1对3,或是3对1的相关冲突,最终雷达航迹和融合点迹实现一一对应的关系。同时也可能存在某些融合航迹或雷达点迹未收到任何与之关联的信息,这时我们将这些融合航迹或雷达点迹送Initiation初始化进行处理。
融合航迹和雷达点迹实现了1对1的匹配后,进入航迹更新处理阶段( TrackUpdate)。MST采用自适应卡尔曼滤波器进行航迹更新,当系统受到航迹报告时,立即根据报告信息内容,判断航迹趋势,根据卡尔曼滤波器提供的三种数据转换模型进行匹配。利用均分误差最小的方法,对多个信息报告进行平均运算,即可更新系统融合航迹,使系统融合处理不间断,提高了航迹参数判断的准确性。
对一些未参与航迹更新的点迹将送入Initiation初始化,生成新的系统航迹。航迹更新后,即进入航迹管理( TrackManagement)。航迹管理是对航迹质量的评估,对一些低质量或速度过高的不标准的航迹进行删除。
MSTS服务器根据雷达信号的时标进行相应的融合计算。在离线参数中设定了每个雷达是否采用时标(UNIVERSAL TIMESTAMPING)解析参数,若为TRUE,则以雷达端添加的GPS时标为准;若为FALSE,则以THALES系统pline接收端的时标为准,雷达选取接收到的正北报和扇区0的时间为参考时间,用以判断雷达的状态以及雷達数据是否有效。如果雷达数据超过参考时间一定范围,则认为数据无效,被MSTS服务器丢弃;如果3次未收到正北报或扇区O的雷达数据,或者此雷达数据超过一定参数时间被丢弃处理,则雷达的状态自动切换为FAILED。
3 结语
经过MSTS多监视源数据跟踪处理,自动化欧洲猫V5系统可以输出稳定准确的综合航迹信息提供给管制员使用。现阶段中南区主要引接信号源以A/C模式雷达信号为主,后续根据国家对民航系统服务要求的统一部署,我局将进一步引接S模式雷达信号以及ADS-B信号,以为民航事业蓬勃发展提供更有力的技术保障!
参考文献
[1] Thales ATM Pty Ltd NESACC EUROCAT-XSystem/Segment Specification.
