RCD30倾斜摄影系统相机视准轴与IMU轴误差改正方法
2018-05-08杨兵战
□ 杨兵战
(辽宁省地理信息院,辽宁 沈阳 110034)
1.检校场原理及实验
由于RCD30倾斜摄影系统相机视准轴与IMU视准轴不平行,存在一个系统的差异Misalignment。IMU记录的姿态是以IMU的视准轴为基准,所以需要将记录结果改正到相机的真实姿态。在第一次装机,Misalignment数值未知,需要飞检校场;若将整套设备从飞机上拆装,或者系统遇到剧烈碰撞,Misalignment数值会产生变化,也需要重新飞行检校;若更换镜头,此数值以及PPA也会产生变化,此时也需要检校。作业流程(如图1所示)。
基于RCD30相机系统检校场实验设计(如图2所示),航线按照井字交叉且要双向飞行,共计8条航线。每条航线30~40张影像。航向重叠度80%。飞行区域不能有水域,避免高层建筑。中心区域和四角各布设控制点3~5个,用作检查点。更改高度可以自动计算出两条航线之间的距离,根据GSD计算可以得出飞行航高,然后可确定航线间距。最终确定检校场飞行航高为824m。
2.视准轴误差值解算
基于RCD30后处理模块中IPASCO+是用于框幅式相机数据的软件,主要功能用于进行框幅式相机的检校,计算精确视准轴误差(Misalignment)以及根据POS生成影像的外方位元素EO等。由于相机视准轴与IMU视准轴不平行,存在一个系统的差异:Misalignment。IMU记录的姿态是以IMU的视准轴为基准,需要将记录结果改算到相机的真实姿态。也就是通过特定的算法来计算这个视准轴误差值。根据前面提到的检校场飞行数据解算,得到由解算后的.sol文件、相机文件和曝光点文件。加载上述三个文件,会自动识别每个镜头的编号。视准轴误差值,初始值为0,检校之后会有检校成果值。加载此相机在检校场内的检校影像,选择四条航线数据,每条航线20张以内,影像尽量对称,(如图3所示)。

图1 RCD30相机检校流程图
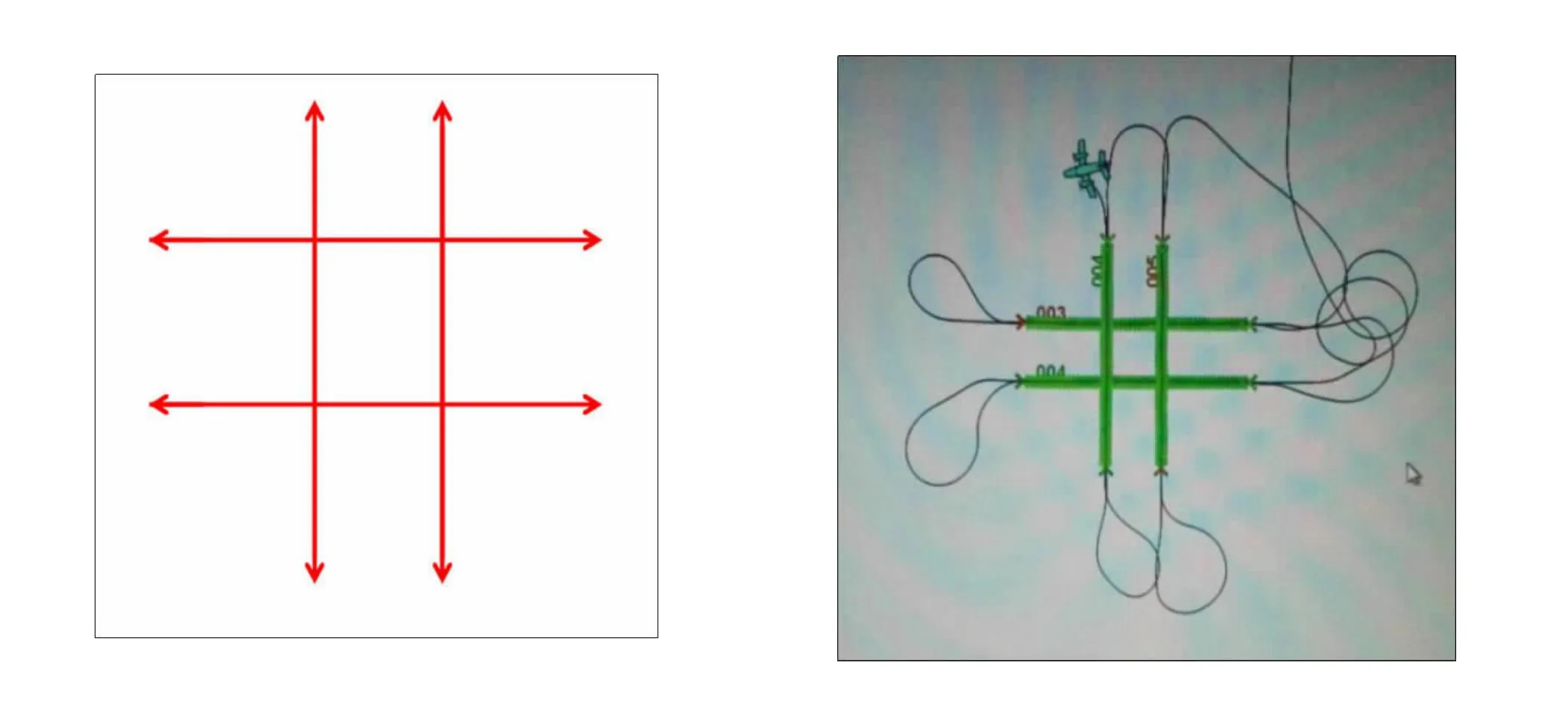
图2 检校场“井”字飞行设计图与完整飞行轨迹
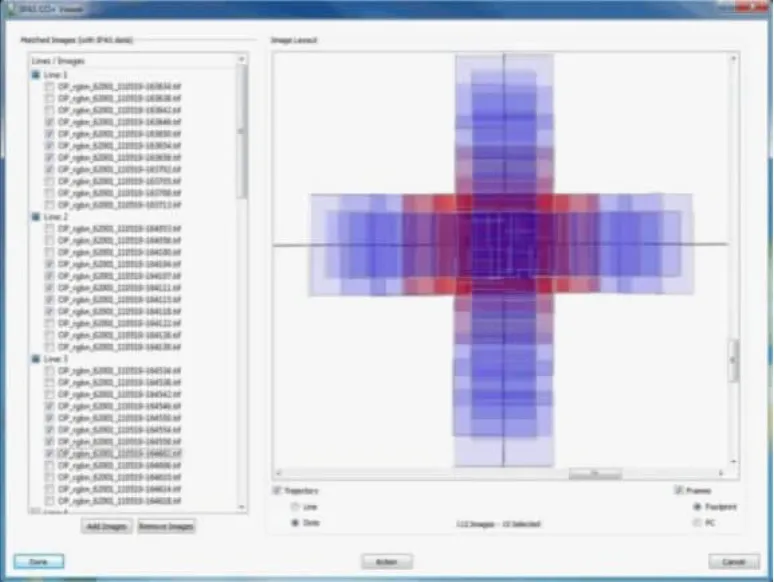
图3 利用IPAS CO+加入检校影像
先应用APM(建立模型连接点),运行APM可选择策略,本实验选取apm_settings_5×5_robust的策略。在APM之后,运行空三,会有Sigma的计算值、PPA检校结果和Misalighment检校结果。根据每个航线数据的检校结果,记录Sigma0值。检校是个迭代过程,需要使用新的相机文件重复迭代,运算出精确的结果再选择新的相机检校文件,重复迭代过程。由于APM已经运行完毕,只需将Sigma0值设置为新的Sigma0值。第二次迭代后,PPA和Misalighment数值会产生变化,并保存新的相机检校文件,重复之前所述迭代过程。最终Misalighment数值不再变化时,保存最终的相机文件(如图4所示)。在后期的数据处理中,使用最新的相机文件,利用检校场计算中最后一次迭代结束之后,出现的最终Misalighment数值,根据这个数值,利用IPAS CO+,加载实验数据,包括POS解算的.sol文件、相机文件、曝光点文件等,最终生成项目数据的EO。

图4 利用IPAS CO+确定Misalighment数值
3.结束语
由于RCD30倾斜摄影系统相机视准轴与IMU视准轴不平行,存在一个系统的差异。在第一次装机时这个误差值未知。采用独特的双向“井”字线双向飞行技术并结合RCD30倾斜摄影后处理技术,根据建立模型连接点空三纠正的方法,得到相机镜头精确的视准轴误差值,改正了系统误差,大大提高了相机框幅影像数据的初始外方位元素精度,从根本上提高了后续三维重建的精度。
参考文献:
【1】付建红.相机定向的机载惯性测量装置视准轴误差求解方法[J].测绘学报,2014,43(7):698-704.
【2】谢谦,赵平印,丁兆连.RCD30倾斜航摄仪使用经验总结[J].测绘与空间地理信息,2016,39(6):219-224.
