车载飞轮电池的振动控制策略研究
2018-05-07,,,
,,,
(南京航空航天大学机电学院,江苏 南京 210016)
0 引言
车载飞轮电池是安装于车身上,为汽车提供动力的一种装置。在储能一定的情况下,其质量比超级电容器更轻、体积更小,更加有利于车载布置及安装[1-2]。
车载飞轮电池共有3种工作状态:充电状态、放电状态和保持状态。在充电状态时,电动机驱动飞轮转子高速旋转,转子转速逐渐升高至额定转速,将电能储存为机械能;在放电状态时,发电机将存储的机械能转化为电能驱动汽车工作,飞轮转子转速逐渐降低;在保持状态时,飞轮转子在磁悬浮轴承支承下保持高速稳定旋转,转速基本保持不变。
为增大车载飞轮电池的比能量和比功率,提高储能效率,飞轮转子需要具有较高的极限转速,因此,车载飞轮电池选用无接触、无磨损、无需润滑和易于高速化的磁悬浮轴承为飞轮转子提供支撑。
磁悬浮轴承的位移刚度系数为负值,具有本质不稳定性,再加上磁轴承非线性的力-位移和力-电流特性,以及铁芯材料磁饱和与磁滞等因素,使磁轴承系统具有非线性和参数不确定性,因此,需对磁轴承实施主动控制[3]。目前的工业应用中,磁轴承控制器大多是传统PID控制。但对于车载飞轮电池而言,高转速和过临界转速要求系统具有高稳定性和可靠性,汽车的转向、启动/刹车、车身俯仰带来的附加载荷对系统的动态性能提出更高要求,传统PID控制器显然无法达到理想的控制效果。磁轴承控制策略对系统的动态性能和稳态精度均有着重要影响,国内外许多学者对磁轴承的控制策略进行了深入的研究。DeSimdt等人采用鲁棒自适应控制策略,保证旋翼直升机传动系统的复合材料转子超临界转速稳定运行[4]。Murata等将PID控制与LQ(linear quadratic)控制器相结合,使转子平稳越过两阶临界转速,并有效抑制了转子的振动[5]。苏义鑫等提出一种基于BP神经网络的自适应PID控制器,该控制器的输出是P,I,D信号的非线性组合,能够补偿磁轴承系统的非线性,并仿真验证了该控制器的有效性[6]。谢振宇等提出了基于转速的变参数控制,分析了不同控制参数对系统悬浮和旋转状态的影响,并完成了不同转速区段变PID参数的轴承-转子系统高速旋转实验[7]。
单神经元具有自学习和自适应能力,由其构成的单神经元自适应PID控制器结构简单,能适应环境的变化且易于应用[8]。在此,采用单神经元自适应PID控制策略,根据磁轴承的运行状况,通过加权系数自适应地对PID各控制参数进行调整,以保证系统具有较好的动态性能。
1 车载飞轮电池试验系统
1.1 机械装置
车载飞轮电池结构如图1所示。飞轮及转子本体轮毂选用铝合金材料,其密度小、强度高,是理想的轮毂材料。飞轮用碳纤维和环氧树脂经湿法缠绕成型,相比于金属材料,复合材料具有更高的抗拉强度和极限转速,可极大地提高储能密度,且飞轮破坏后复合材料飞轮带来的危害更小。差动安装的电涡流位移传感器,用来检测转子的实时振动位移。上/下径向磁悬浮轴承组件,为飞轮转子径向悬浮提供电磁力。内置高频电机,驱动飞轮转子高速旋转。推力磁悬浮轴承,为飞轮转子轴向悬浮提供电磁力。真空壳体一方面使飞轮转子在真空内旋转从而减少空气磨损造成的能量损失,另一方面可起到有效的保护作用。
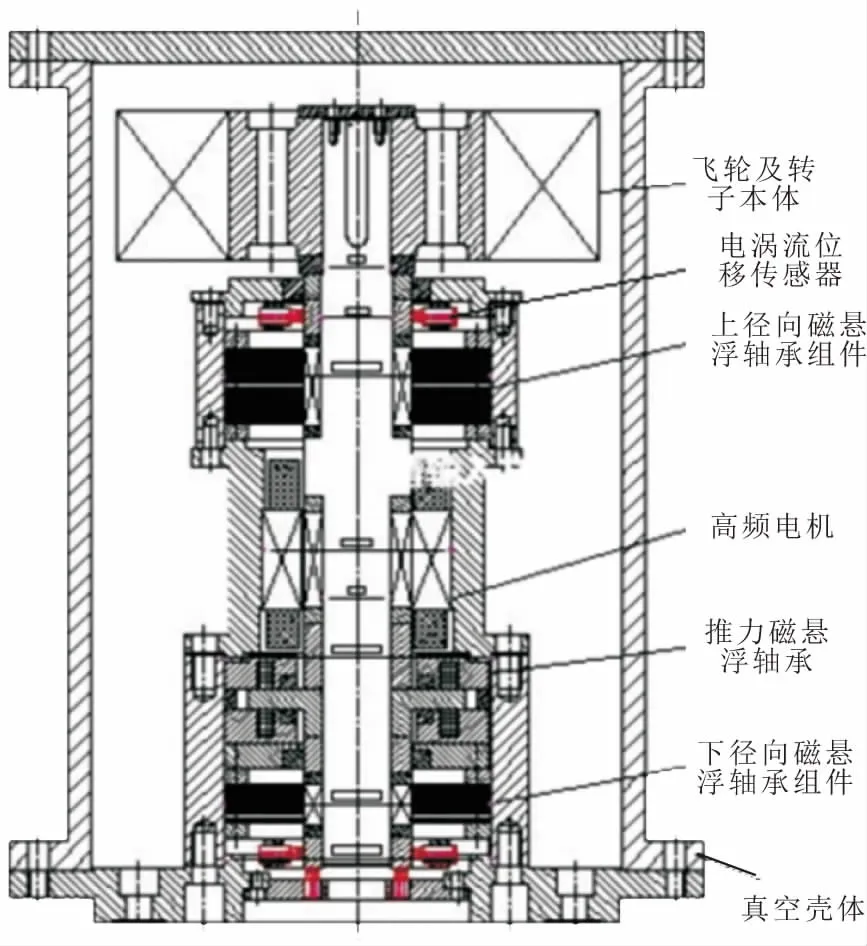
图1 磁悬浮飞轮电池机械结构
磁悬浮飞轮转子总长388 mm,转子质量14.12 kg,转子极转动惯量0.057 kg·m2,转子直径转动惯量0.23 kg·m2,径向单边保护气隙0.15 mm,轴向单边保护气隙0.20 mm,径向和轴向磁悬浮轴承的偏置电流均为2.0 A,飞轮电池额定工作转速为12 000 r/min。
1.2 各环节数学模型
磁悬浮轴承-转子系统主要包括位移传感器、位置控制器、功率放大器、电磁铁和转子,工作原理如图2所示。参考信号Xref与传感器检测到转子的实际位移信号X作差,得到误差信号e(k),经调理电路处理后,将误差信号e(k)送给位置控制器,控制器按照相应的控制策略对误差信号e(k)进行运算,得到输出信号,功率放大器根据此输出信号调整磁轴承线圈中的电流大小,从而产生合适的电磁力作用于转子,使转子稳定悬浮。
本文采用非接触式电涡流传感器监测转子振动,为测得传感器的通带,对其进行动态标定。动态标定盘是一个带有8条凹槽的圆盘,凹槽深度为0.1 mm,其结构如图3所示。利用高速电主轴带动动态标定盘转动,改变电主轴转速,可得到转速8倍频振动成份的幅频曲线,如图4所示。该曲线即为电涡流传感器的动态特性曲线。

图2 磁轴承系统工作原理
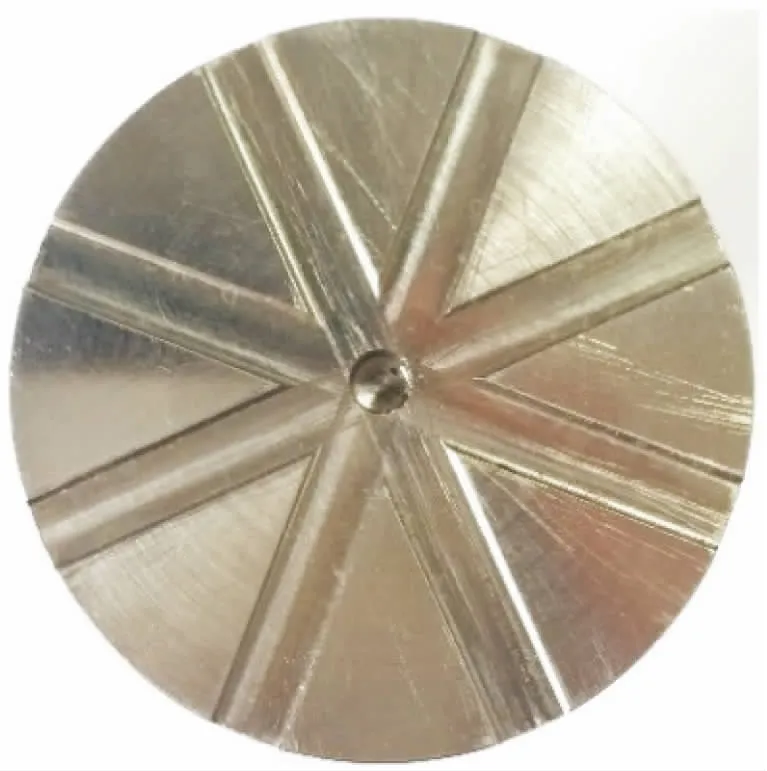
图3 动态标定盘

图4 传感器幅频曲线
由图4可知,传感器通带约为3.2 kHz,则传感器对应时间常数为:
(1)
在保护轴承范围内,转子最大振动幅值为0.3 mm,对应二次调理电路输出为0~5 V,传感器的放大系数为:
As=16 667 V/m
(2)
位移传感器的传递函数可用一阶惯性环节来表示,由此可得到传感器环节的传递函数:
(3)
功率放大器和电磁铁共同构成系统的执行机构。在功率放大器的控制信号输入点用信号发生器加入峰峰值为4 V正弦波,模拟转子振动的同频成分,以电流响应为输出,对各频率的输入输出进行计算,可以得到幅频特性曲线,如图5所示。
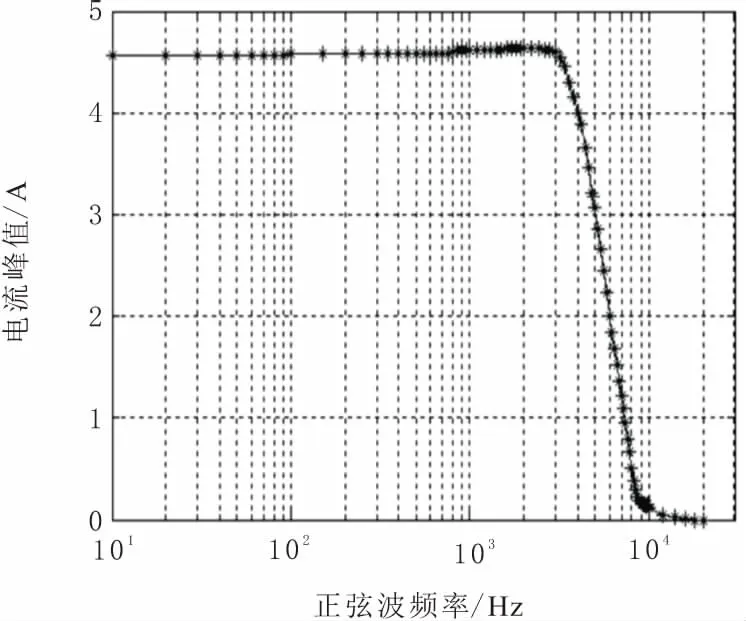
图5 功率放大器幅频特性曲线
由图5可知,功率放大器的带宽约为5 kHz,对应功放环节对应的时间常数为:
(4)
磁轴承线圈中的电流为0~4 A,控制器输出信号的范围是-5~+5 V,功率放大器放大系数为:
Aa=0.4 A/V
(5)
功率放大器的传递函数可用一阶惯性环节来表示,由此可得到功放环节的传递函数:
(6)
采用差动励磁方式工作的一对电磁铁,一个磁极以偏置电流i0与控制电流ix之和(i0+ix)励磁,另一个磁极以二者之差(i0-ix)励磁。通过改变控制电流,可以改变2个电磁铁产生的吸引力大小,使转子稳定悬浮。
忽略各自由度之间的耦合及陀螺效应的影响,差动励磁的磁轴承合力为:
(7)
F为电磁力合力,方向与x一致;x0为平衡位置处的气隙;x为转子偏离平衡位置的位移;k=μ0A0N2/4,μ0为真空中的磁导率,A0为电磁铁磁极面积,N为线圈匝数。将式(7)在x=0和ix=0附近作泰勒展开并略去高阶无穷小量,得到电磁力线性化关系式:
F=kxx+kiix
(8)

由牛顿定律,转子的受力:
(9)
对式(9)进行拉普拉斯变换,结合磁轴承具体参数,可得磁轴承在一个自由度的传递函数为:
(10)
此时整个闭环系统的传递函数为:
(11)
Gc(s)为控制器环节的传递函数。
2 单神经元自适应PID控制
针对车载飞轮电池高转速、过临界和复杂工况带来的附加载荷,采用单神经元自适应PID控制策略,以减小系统振动和满足动态性能的要求。
2.1 神经元学习规则
加权系数的调整按照有监督的Hebb学习规则实现,以Oi表示神经元i的激活值,Oj表示神经元j的激活值,di为期望输出, 则从神经元i到神经元j的连接权值系数wij可表示为:
Δwij(k)=ηOi(k)Oj(k)[di(k)-Oi(k)]
(12)
在教师信号di(k)-Oi(k)的引导下, 单神经元控制器不断对环境信息进行相关学习和自组织, 使神经元之间的连接强度发生改变, 从而使加权系数自适应改变[9]。
2.2 单神经元自适应PID控制
神经元是以大脑生理研究成果为基础,通过模拟大脑的某些机理对输入信息做状态响应而进行信息处理。 神经元具有自学习自组织能力,能根据环境变化调整权值;也具有很强的信息综合能力,能同时处理大量的输入信息。利用单神经元的上述特性,将单神经元和PID控制结合起来,利用单神经元的自学习能力,对加权系数进行调整,使得控制器最终输出的PID参数可根据运行状况自适应的改变,构成磁轴承的单神经元自适应PID控制器[10-11]。控制器原理如图6所示。

图6 单神经元自适应PID原理
x1,x2,x3是转换器输出的神经元学习控制所需状态量;w1,w2,w3分别是PID控制中比例、积分和微分项的加权系数;u(k)为单神经元PID控制器的输出信号,K为神经元的比例系数。
转换器3个节点的输出可表示为:
(13)
由此,可得到基于有监督的Hebb学习规则的单神经元自适应PID控制算法为:
(14)
基于有监督的Hebb学习规则的单神经元自适应PID的加权系数学习算法为:
(15)
nP,nI,nD分别为比例、积分、微分的学习速率;z(k)为误差信号,z(k)=e(k)。当误差信号z(k)发生变化时,w1,w2,w3会产生自适应变化,单神经元PID的自适应性正是体现于此。
3 系统仿真研究
根据得到的系统各环节数学模型,对单自由度磁轴承-转子系统进行相关控制策略的仿真研究,控制参数的选取由实际调试时确定。为了让仿真结果更接近实际系统,仿真时各环节均不作简化。
分别采用不完全微分PID和单神经元自适应PID对磁轴承-转子系统的起浮特性及抗干扰性能进行仿真研究,以比较2种不同控制策略的优劣。在普通PID算法中加入惯性环节(低通滤波器),以削弱高频噪声,构成不完全微分PID控制算法。采用表1的控制参数,在Simulink中利用其基本的模块,搭建系统的不完全微分PID控制框图。

表1 不完全微分PID控制参数
不完全微分PID仿真结果如图7所示,由图7可知,转子起浮时,系统调节时间约为0.15 s,超调量为10%。在t=0.2 s时,加入幅值为0.1的脉冲激励信号,此时系统的调节时间为0.03 s,超调量为32%。
根据系统各环节数学模型及单神经元自适应PID相关的控制算法和学习算法,编写MATLAB程序,完成系统单自由度单神经元自适应PID控制策略的仿真研究。启动时,初始PID参数同表1,比例、积分、微分项的学习速率分别为nP=10,nI=1,nD=10,比例、积分、微分项的初始加权系数分别为w1=0.33,w2=0.33,w3=0.33,神经元的比例系数K=0.02。图8、图9分别为单神经元自适应PID控制的起浮曲线和加权系数变化曲线。

图7 不完全微分PID控制的起浮曲线
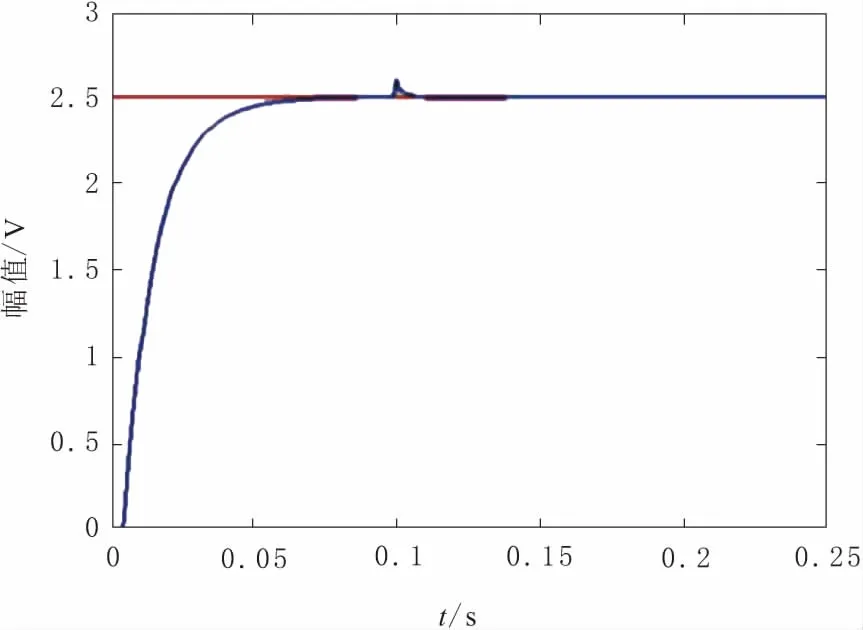
图8 单神经元PID控制的起浮曲线

图9 单神经元PID加权系数变化曲线
由图8可知,转子起浮时,系统调节时间为0.08 s,无超调量。在t=0.1 s时,加入幅值为0.1的脉冲激励信号,此时系统的调节时间为0.02 s,超调量为8%。而由图9可知,在t=0.1 s加入幅值为0.1的脉冲激励时,加权系数没有变化,即说明参数稳定性好。
在其他仿真条件保持不变的情况下,仅改变脉冲激励信号的幅值。在t=0.1 s时,加入幅值为1.0的脉冲激励信号,由图10可知,系统的调节时间为0.05 s,超调量为40%。由图11可知,在较大干扰情况下,加权系数变化也很小,说明参数稳定性好。
仿真结果表明,单神经元自适应PID控制策略与不完全微分控制策略相比,系统无超调量,调节时间短,鲁棒性好。同时,单神经元自适应PID在有扰动存在的情况下,参数稳定性好。

图10 单神经元PID控制的起浮曲线

图11 单神经元PID加权系数变化曲线
4 系统高速旋转试验
车载飞轮电池试验系统包括飞轮电池本体、磁轴承电源箱/电控箱、仿真器和PC机,其中,数字控制器和PC机之间通过仿真器连接通信。磁悬浮储能飞轮试验系统,如图12所示。

图12 试验系统实物
分别选取最优控制参数将飞轮转子稳定悬浮。不完全微分PID控制参数如表2所示,单神经元自适应PID初始KP,KI,KD,Tf同表2,比例、积分和微分项的学习速率和初始加权系数,如表3所示。

表2 高速旋转试验不完全微分PID控制参数

表3 高速旋转试验单神经元自适应PID控制参数
高速变频电机驱动转子加速至12 000 r/min,借助本实验室开发的数据采集系统,采集2种控制策略下转子各转速的振动位移,利用Origin绘制出转子的同频振幅曲线,如图13所示。

图13 单神经元自适应PID与PID同频振幅对比
由图13可知,飞轮转子在3 000 r/min左右存在临界转速,而在单神经元自适应PID控制策略下,飞轮转子振幅为0.3 μm,远低于不完全微分PID的3.56 μm,控制精度高。在7 400 r/min前,单神经元自适应PID控制策略下的振幅小于不完全微分PID控制策略,且在全转速范围内,单神经元自适应PID振幅变化平坦,均不超过1.7 μm。
5 结束语
通过对单神经元自适应PID控制策略的理论研究和试验分析,可得如下结论:
a.单神经元自适应PID控制策略能够自动调整控制参数,在全转速范围内振幅变化平坦,动态性能良好。
b.单神经元自适应PID控制策略下,转子最大振动幅值仅为1.66 μm,控制精度高。
c.与不完全微分PID相比,单神经元自适应PID能够改善系统的综合性能,使转子在临界转速附近能够安全稳定运行。
参考文献:
[1] 戴兴建,邓占峰,刘刚,等.大容量先进飞轮储能电源技术发展状况[J].电工技术学报,2011,26(7):133-140.
[2] Hadjipaschalis I,Poullikkas A,Efthimiou V.Overview of current and future energy storage technologies for electric power application[J].Renewable and Sustainable Energy Reviews,2009,13(6/7):1513-1522.
[3] Schweiter G, Maslen E H. Magnetic Bearings:theory,design,and application to rotating machinery[M]. New York:Springer,2009.
[4] Desmidt H A, Wang K W, Smith E C. Robust-adaptive magnetic bearing control of flexible matrix composite rotorcraft driveline[J].Journal of the American Helicopter Society, 2008,53(2): 115-124.
[5] Murata M,Tajima H,Watanabe T,et al.New modeling and methods for flexible rotors with magnetic bearings toward passing through critical speeds caused by elastic mode[R]. Martigny,Switzerland:The 10th International Symposium on Magnetic Bearings,2006.
[6] 苏义鑫,龙祥,张丹红,等.主动磁轴承的神经网络自适应PID控制[J].华中师范大学学报(自然科学版),2004,38(3):304-307.
[7] 谢振宇,牟伟兴,周红凯,等.基于转速的磁悬浮轴承转子系统变参数控制[J].振动工程学报,2012,25(6):739-744.
[8] 庄华强.磁悬浮柔性转子系统的自适应控制研究[D].南京:南京航空航天大学,2010.
[9] Lu B,Choi H,Buckner G D,et al.Linear parameter-varying techniques for a control of a magnetic bearing system[J].Control Engineering Practice,2008,16(10):1161-1172.
[10] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[11] Wu Q H,Ni W,Zhang T.Research on Digital Control System for Three-degree-Freedom Hybrid Magnetic Bearing with Bilateral Magnetic Pole Faces[C]∥Chinese Control and Decision Conference.Xuzhou,China,2010:2893-2897.
