无尘自动擦黑板装置的研究与分析
2018-05-07张世亮陈伟嘉罗思维
吴 佳,张世亮,吴 米,陈伟嘉,罗思维
(广东海洋大学机械与动力工程学院,广东 湛江524003)
0 前言
随着人们对教育的重视度和提高以及教育设施的日益完善化,相应地,有些相关问题逐渐凸显出来,引起广大人群的关注。目前,国内课堂板书教学使用设备虽呈多样化,但经了解,教师在课堂中使用最多的仍是黑板-粉笔-黑板擦这一传统方式[1],教师在授课时板书在黑板上,过后用黑板擦将字迹擦除掉,这一方式既浪费了宝贵的课堂时间,同时擦除黑板产生的粉尘被师生或相关工作人员吸入,将对其身体健康形成潜在的威胁。针对以上所涉及的问题,欲设计一种无尘自动擦黑板装置(不同黑板覆面装置)。本文首先对设计装置进行CATIA的三维建模,并阐释其基本工作原理,进而对黑板擦装置通过ADAMS作动力学及运动学等方面的分析。通过设计及分析,从根本上解决黑板擦现存在的问题。对教室的清洁、师生的身体健康以及课堂的高效利用有着极为关键的作用。
1 无尘自动擦黑板装置构成与工作原理[2]
参照传统式黑板的安装方式,对无尘自动擦黑板装置进行整体结构的设计。无尘自动擦黑板装置主要由丝杠、横梁、横梁内部结构及微型吸尘器构成[3]。整体结构具体设计如图1所示。

图1 无尘自动擦黑板装置
两条丝杠机构通过同步带连接,保证他们之间的同步性。
其中横梁2上包含有皮带轮、粘有毛毡的皮带、微型电机、刮板、压紧轮、压紧轮卡座等,属半封闭式结构,横梁2内部的设计旨在防止产生的粉尘散布在整个教室空间中,因此,只需毛毡皮带和黑板之间得到接触即可,其他方向上均作封闭式处理。横梁的具体结构如图2所示。

图2 横梁内部结构
无尘自动擦黑板装置的工作原理:此装置总体上可概括为三个方向上的运动,实质上所有的动作均是模拟人在使用黑板擦擦黑板的过程,其运动方式分别为:渐进往复式、连续直向式及往复向下式。具体实现方式如下:
(1)渐进往复式运动:在黑板两侧设有两根同步丝杠螺母机构,其长度可根据黑板大小的变化进行调节,由微型电机减速器提供动力,可达到使丝杠按照一定的比例在某个方向上进行转动。皮带的利用使两根丝杠达到同步的效果。当丝杠转动时,带动丝杠间的横梁进行上下往复运动,同时,横梁上的毛毡在黑板表面进行上下往复运动。
(2)连续直向式运动:在介于两根丝杠之间的横梁上安装的皮带毛毡通过电机提供皮带轮的动力在黑板表面从左到右地进行循环运转,多次擦除黑板覆面,使擦除工作更为清洁有效。
(3)往复向下式运动:通过模拟人在擦黑板时需要一个压紧黑板的力,这一力的实现通过横梁内部多个弹簧压紧轮对皮带的压紧力来实现,弹簧压紧轮的位置可以调节,使皮带在垂直方向上始终处于张紧状态,保证皮带上的毛毡始终与黑板表面相接触。同时,可根据实际情况中皮带的长度决定压紧轮的个数。压紧轮的安装方式为:在横梁上设置有多个压紧轮卡座,直接将压紧轮卡在基座中,便于压紧轮的安装和换取。
上述主要为自动无尘擦黑板装置的自动部分,采用机械化结构以达到省时省力的效果。
无尘部分采用方法为:将横梁上的皮带毛毡采用封闭式,保证毛毡与黑板面相接触即可,在横梁上加刮板,可根据实际情况增加或减少刮板的数量,这样在毛毡与黑板接触擦除后字迹后粘在毛毡上的粉末就会被刮板刮掉,进而被跟刮板连接着的微型吸尘器清理,人为地定期将吸尘器中的粉末处理掉,极大地解决了粉尘这一问题,很好地起到了防尘的作用。这对师生的身体健康和教室环境的清洁起了极大的作用。
2 无尘擦黑板装置的分析
2.1 建立仿真模型
利用所设计装置的三维结构及其工作原理,设计无尘擦黑板装置的仿真模型,见表1及图3.

表1 各部件间运动的约束关系表

图3 无尘擦黑板装置的仿真模型
2.2 运动分析
根据ADAMS仿真软件的分析特性,建立了仿真模型中除尘机构的运动学分析曲线如图4所示[4]。

图4 除尘机构的运动曲线
按照其运动规律的曲线变化,建立除尘机构受到的合理变化是否会引起稳定性问题。如图5所示,发现除尘机构的合力随时间的增加而增大。

图5 除尘机构的合力曲线变化
2.3 除尘装置的运动学与动力学分析[5]
利用ADAMS分析除尘机构中皮带毛毡运动时,在黑板面产生的接触力的变化对其运动速度的影响。如图6所示,为接触的力曲线,其中,当damping值为关键因素。
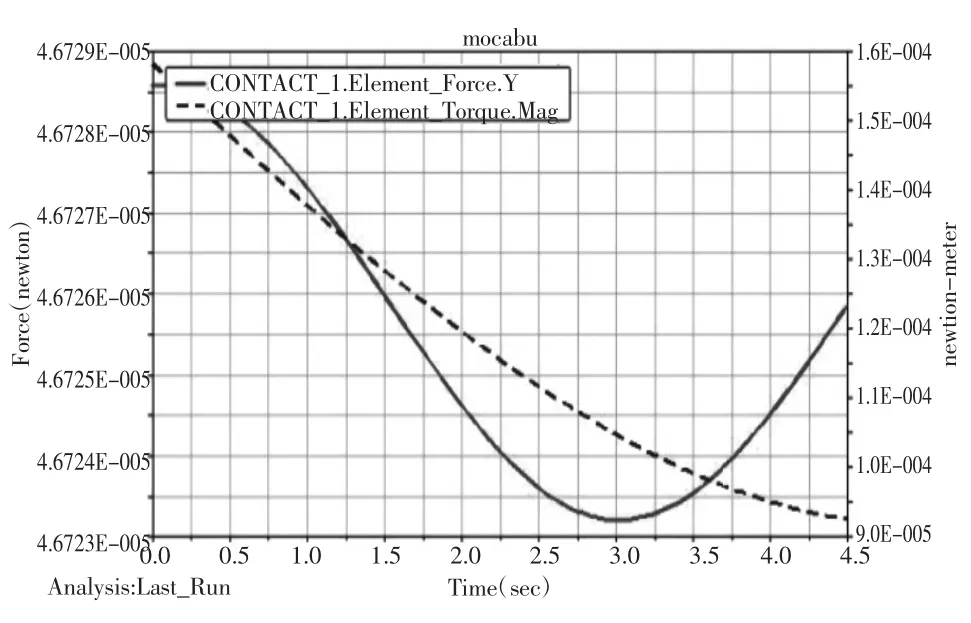
图6 摩擦布产生的接触力变化
设定damping值,分析是否因为阻力值的变化影响黑板擦装置运行时,在皮带毛毡与黑板接触应力变化对除尘效果分析,以及速度的变化是否引起机械振动,即是否产生位移振荡。根据表2,damping值依次增大,进行仿真分析。

表2 摩擦布与黑板的接触力中阻尼变化参数
对除尘机构进行仿真运动的分析,如图7所示,为除尘机构的移动速度的变化曲线,进行讨论。
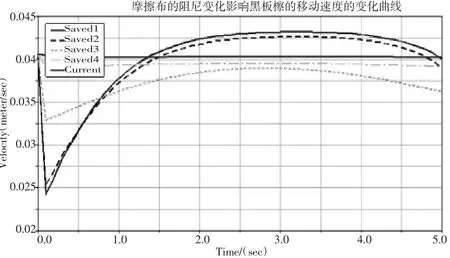
图7 除尘机构的移动速度的变化曲线
实验发现,除尘机构的移动速度在仿真时间为0 s~1.5 s范围内,速度值得变化由递减到递增;在时间1.5 s~5.0 s范围内,除尘机构的移动速度值的增量趋近于0.由此可见,阻尼的变化对除尘机构的移动速度有较大影响,需考虑其阻尼值得设置对除尘机构平稳运行。
2.4 除尘机构中的弹性体分析
在除尘机构的设计中,因设计的摩擦布的阻尼值固定,但在实验中,需要通过弹性体的结构改变摩擦布与黑板接触过程中的阻尼值。如图8,在仿真模型的除尘机构中施加的弹性变体,分析其弹性力、弹性体的变形速度及弹性位移变量的曲线。
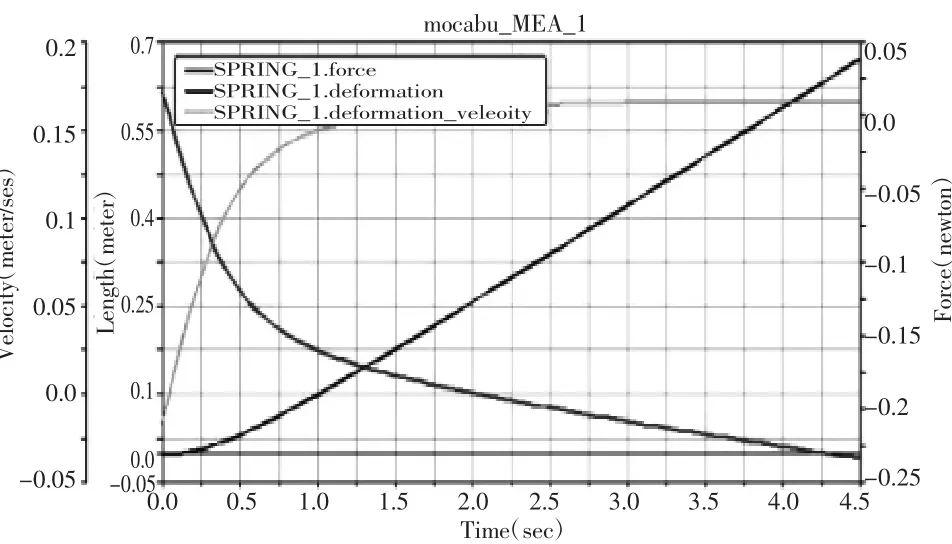
图8 弹簧力的力变化曲线
由图发现,弹性体的变形速度的曲线由递增到逐渐平稳,其弹性力有递减到平稳,而变形量是均衡递增。
3 结束语
本无尘自动黑板擦装置克服了现有的黑板-粉笔-黑板擦费时费力、粉尘污染等不足。本装置机械化设计。具体优势如下:
(1)结构简单,成本低,耐用、快速省时。利用简单的机械结构加吸尘器达到自动无尘的效果,结构没有那么繁琐,反而简单化;成本低,零件互换性强,耐用。采用微型电机提供动力,省时又省力。
(2)多规格。可根据黑板面的大小调节丝杠与皮带的长度以与黑板面相适应。
(3)无尘清洁。将擦除黑板的粉尘控制在横梁密闭的空间中,通过刮板将毛毡上刮下的粉尘迅速转移到微型吸尘器中,人为定期清理,使人在整个自动无尘擦黑板装置擦除黑板时不接触黑板以及装置,避免师生及相关工作人员过多地吸入粉尘。有益于身体健康,防止环境污染[5]。
参考文献:
[1]王秀红.基于QFD和TRIZ集成理论的电动吸尘黑板擦创新设计[J].包装工程,2014,35(18):39-42.
[2]李树元,李光举,王贵兰.基于电器控制的无尘黑板研究[J].科技风,2016(18):58.
[3]郑利东.基于ProE的吸尘器产品开发技术研究[D].苏州:苏州大学,2013.
[4]张继忠,隋 博,秦世安,等.机构运动方案仿真实验平台研究[J].实验科学与技术,2010,8(3):17-19.
[5]程 靳.工程力学.Ⅱ .通用部分[M].北京:机械工业出版社,2002.
