基于激光点云扫描的高精导航地图关键技术研究
2018-05-07杨玉荣李峰
杨玉荣,李峰
(深圳市凯立德科技股份有限公司,深圳 518040)
1 高精度地图概述
随着社会的不断发展,道路路网信息变的越来越庞大复杂,传统导航地图所能提供的信息、精度及显示方式等,逐渐无法满足人们多样的行车需求,尤其对于多车道路口、高架桥等复杂交通节点。因此,精度更高并能提供道路综合信息的电子地图变的愈加重要。本文描述的高精度地图方案从数据采集生产的源头规划,通过激光点云技术立体感知现实世界的综合信息,经过后期的分析处理及三维重建,最终还原出接近真实道路环境的地图数据,并通过不断地更新维持数据的可靠性,从而为用户提供道路的综合数据,为智能交通的发展提供良好的基础和拓展体验空间。整体流程如图1所示。
2 地图数据生产及处理
高精度地图的生产,首先依赖于对真实道路环境数据采集的精度及丰富程度,接着进行数据要素的归纳、分析处理及存储,通过三维重建的方式构造场景模型,并基于该层面增加车道、交通标志、立交桥等道路要素信息并进行显示,最终实现对实际行车环境的还原。
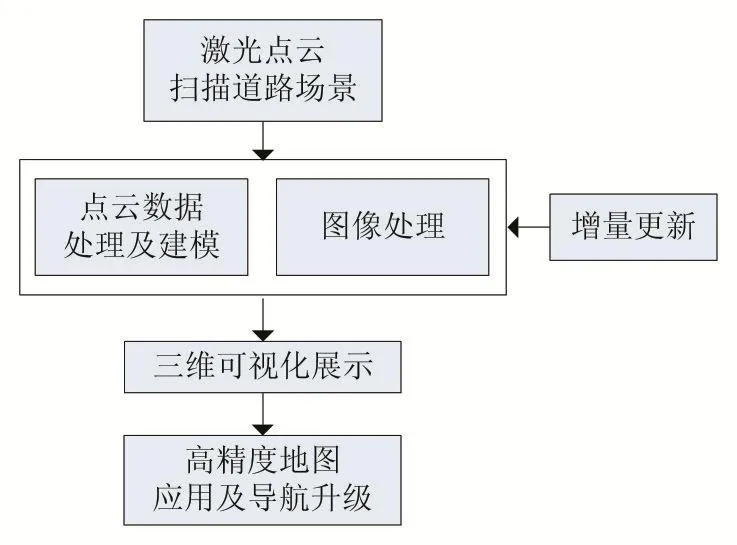
图1 高精度地图整体流程图
2.1 激光点云技术
传统获取道路信息的方法包括人工测量和数字摄影测量等方式,存在效率低、准确度差及道路要素信息少等诸多问题。而激光三维扫描为全景式非接触式测量,可以直接获取到物体表面的点云采样数据,如果采样密度足够,理论上可以实现任意曲面的高精度重构。
激光点云扫描技术可以与卫星定位系统(GNNS)、惯性导航系统(INS)、CCD相机等组合使用,在采集高精度基础道路信息的同时,获取到车道级道路、立交桥等复杂的道路形态,提高测量效率,缩短地图更新周期。激光扫描获取的道路点云数据密度大,边缘及曲度变化等特征明显,为道路信息的准确提取提供了良好的基础特征支持,主要方法可归纳为以下三种:
●利用高程和密度特征提取道路信息。根据扫描数据的高程信息和离散程度生成特征图像,可以较好地滤除树木、建筑物等非地面目标。
●利用反射强度提取道路信息。邹晓亮[1]等提出利用地面反射强度的不同,将车道标识线从路面中先分离出来,通过扫描角区分左右车道,再根据国家道路标识线的相关规定,区分出单黄线、双黄线、分隔虚线及短标识线等信息,最后通过最小二乘算法进行拟合校正。
●利用边缘及曲度特征提取道路信息。将点云数据分割成一系列的二维条带并进行滤波,根据平坦路面和突起道路边缘的已知特征进行边缘分割,区分出路面和非路面区域,逐步向前推进将分割线连通即可获取到道路的边线位置。
激光点云扫描数据中的道路信息比较复杂,为了避免提取结果的错误或遗漏,需要综合多种道路特征进行处理,实现目标对象从整体到局部的分离与提取,为下一步三维模型的建立准备好精确的数据基础。
2.2 三维可视化
三维地理信息系统不是对二维系统的简单扩展,而是以空间模型为基础,通过分析决策形成立体数据库直至三维展示的综合研究过程。激光点云数据的三维可视化过程主要包括数据预处理和模型重建两个步骤。
(1)数据预处理
测量获取的点云数据存在一定的噪声,需要进行数据滤波和平滑操作,以去掉噪声点和粗差数据。同时,由于激光扫描对空间信息的采集具有盲目性,数据在三维空间的分布也呈现出随机的离散性。有些数据位于真实的地形表面,有些位于人工建筑物或自然植被上,如果直接利用这些数据进行建模,处理难度大且难以保证准确度。因此,需要在滤波去噪的基础上进行数据分类,将其划分成具有单一几何特征的拓扑区域。一般来说,点云数据经过滤波处理后,基本可分成两大类:地面点集和非地面点集,如果需要对非地面点集进行更详细的分类,如建筑物区域集合或植被区域集合等,需要基于目标特征进行具体分析,以便在原始点云数据中进行判断与分离。最后对目标数据进行相应的融合及缩减操作,提高模型数据的聚合度,降低模型建立的数据复杂度,为三维场景还原提供较优的目标对象信息。
(2)模型重建
模型重建主要包括模型建立、模型平滑、残缺数据处理及模型简化等步骤。点云数据预处理后分为地面点集和非地面点集,对应的模型重建也是分开进行的。
地面点集呈现不规则的离散分布,需要进行网格化处理即将离散点连续化,才能以模型的形式来表达。目前主要采用三角网格的方式进行数据组织,将地形表面看做由连续的数据点三角形构成,通过插值实现对地形表面的逼近拟合,该理论以狄洛尼(Delau⁃nay)的三角剖分法[2]最为流行。
非地面点集比较复杂,包括建筑物、植被、道路两旁设施等。从距离图像中直接进行目标分类和特征提取比较困难,目前主要采用构建DSM/DEM附加CCD影像融合的方案[3]。本文针对车载激光点云数据的特点,总结了如下建模方法:
●数据的进一步分类。例如对建筑物进行建模时,可以将其他目标对象点(如植被、路灯等)暂时排除;
●充分利用目标对象的特征。例如大部分人工建筑都具有良好的几何特性,从激光扫描数据中分离出出目标对象后,首先对待建模数据进行网格单元划分,提取每个网格中最大Z值和最小Z值点作为该网格数据的特征点,最后进行线段拟合以获取连续的特征曲线,也可以将数据导入专业建模软件并参考其三维建模结果。
●某些目标对象(比如树木、公交站等)由于本身具有不规则性,特征提取和数据重构非常困难,且在道路环境中获取其具体形状的意义不大,一般只需得到大概位置既可。
2.3 图像处理
在高精度地图中,图像处理主要涉及车道线识别和交通标志识别两部分。
(1)车道线识别
车道线将路面划分为不同的功能区域,规定了车辆的行驶方向、范围和变道规则等。车道线具有规范的几何特征、颜色等属性,为自动识别提供了良好的基础,识别方案应满足如下要求:
●具有良好的旋转和尺度不变性;
●可以检测图像范围内的多种车道线,包括白色实线、虚线,黄色单实线、双实线、虚线等;
●已知前后图像之间的相对位置,可以实现重合车道信息的融合及拼接。
(2)交通标志识别
道路交通标志包括路面标志和路旁标志,具有颜色醒目、形状规则、图像简洁等特点。目前交通标志检测与识别的方法主要分为:基于颜色的方法、基于形状的方法及两者相结合的方法。本文基于大量实际采集的交通标志图像,研发完成了一种高精度的图像自动识别软件,能够实现多种常见交通标志的检测与识别,具体流程如下:

图2 交通标志图像识别流程
基于颜色进行交通标志识别时,首先要对不同的颜色空间进行定义及阈值分割,再使用经过色彩特征训练的神经网络作为分类器进行判断和输出。为了提高识别准确率,需要使用各种环境中的实际图像作为神经网络算法的训练样本[4]。
基于形状的交通标志识别方法,主要包括边缘轮廓分析和模板匹配分析:
●边缘轮廓分析:在颜色阀值分割获取到交通标志候选区域的基础上,通过Canny边缘算子提取边缘信息,再使用Hough变换对可能包含的直线、圆形等几何曲线进行检测分析[5],根据形状特征进一步筛选交通标志的候选范围。该方法的优点在于交通标志具有明显的几何形状特征,大部分情况可以达到良好的识别效果,缺点是在标志牌部分缺失或图像严重失真等情况下,边缘检测结果会出现缺口或变形,导致提取结果出现误差。
●模板匹配分析:获取不同环境中的交通标志图像作为初始模板,通过区域分割及特征参数提取,将结果存储起来作为参考模板。将分割后的待识别图像区域与己知模板进行匹配及吻合度分析,最终实现交通标志的识别。该方法检测思路简单,难点在于特征参数的选择和提取,需要能够将多种标志牌区分开来,实际应用中为了提高准确度,一般选取多种特征参数进行综合判断。
3 定位优化及增量更新
高精度地图的最终目的是为了给用户提供更好的行车体验,相比于传统导航地图,高精度地图需要对车辆轨迹的定位方式进行优化,以实现车道级的定位及导航服务;同时为了保证地图数据与实际道路环境的一致性,在全量地图数据的基础上实现了迭代频率更快的增量更新方案。
3.1 定位优化
传统导航地图是道路级的,将车辆位置匹配到道路上即可,而高精度地图要实现车道级的定位需求,由于卫星定位和电子地图本身不可避免地存在一定误差,会导致车辆位置在电子地图上的显示坐标也存在偏差。本文道路定位方案的流程为:
●设置匹配阈值:以车标位置为基准选取周围一定范围内的道路段数据;
●确定候选路段:根据道路可通行方向和车辆已有行驶轨迹,滤除掉距离、角度及路网连通关系不符合行车逻辑的路段;
●计算匹配位置:在候选路段中,根据距离、角度、道路属性等参数确定最优匹配路段,并将车标位置在该路段上的投影点作为最终匹配结果。
3.2 增量更新
导航地图数据的实时性是提供高品质服务的基础。本文基于空间信息多级格网(SIMG)技术和唯一地图要素全局标识体系(MOGIS)技术实现的导航电子地图生产及增量更新平台,可以实现特定数据的定点更新,加快更新频率,最大限度地维护数据的实时性和完整性。具体思路如下:
●完成对全国地图要素的SIMG格网划分,包括基于地形分幅标准的规则格网和基于行政区的非规则格网;
●建立起相应的SIMG-R树索引机制和地图要素全局编码MOGIS,并将数据存储至不同的格网空间,即格网数据块,这些格网数据块呈金字塔式自上而下分布。同时地图数据内所有对象需通过地图要素全局唯一标识码MOGIS ID访问,并保证相同对象在上下层格网之间的MOGIS ID唯一;
●当某处地图数据发生变化时,只需在SIMG格网中搜索出发生变化的最小格网地址,针对该格网内的地图数据进行调整,并以该格网为单位完成数据更新即可。
参考文献:
[1]邹晓亮,缪剑,郭锐增,等.移动车载激光点云的道路标线自动识别与提取[J].测绘与空间地理信息,2012(09):5-8.
[2]宋秋艳.不规则三角网及其可视化实现[D].长沙:中南大学,2008.
[3]胡少林.基于DEM数据的三维地形建模方法研究与实现[D].长沙:国防科学技术大学,2002.
[4]常卢峰.车载辅助系统中交通标志检测与识别技术研究[D].长沙:中南大学,2010.
[5]邵桂珠.道路交通标志识别算法的研究[D].长春:吉林大学,2008.
