基于单片机的遥控搬运机器人
2018-04-26耿银淼李先豪王玉芳
耿银淼 李先豪 王玉芳
摘要:通过单片机编写操控程序,再通过手机进行操控,方便快捷,可以减少老人的体力,利用步进电机来实现机械手的自由旋转,以及通过电磁阀操控气缸,来实现机械手在水平方向以及垂直方向的移动和机械手的吸取。
关键词:单片机;手机遥控;搬运机器人;气动
1引言
当前中国正处于一个飞速发展的时期,尤其是经济方面,人们出于对美好生活的向往尤其是对于大城市的向往使得我国城市化进程的加快,进而使农村中的青壮劳动力数量不断减少城市中年轻人数量增多。虽然大量青年的注入使得各大城市发展加快但却不可避免的造成了农村出现大量留守的孤寡老人,极大地削弱了农村的劳动力,更使得城市与村庄之间的经济拉开了差距,尤其是那种偏远贫瘠的山区。
虽然“望子成龙,望女成凤”是每个家长的心愿,家长们都希望儿女在外闯出一片天,但是大量青壮劳动力的流失就使得农村的留守老人面临日常中的会有一些比较重的东西搬不动却又不得不去搬,而如果强行搬运的话会对身体损伤的问题。本产品设计初衷就是为了解决留守的孤寡老人在此方面的困扰,其次也是一次将机器人推广并深入到我们生活中的一次机会。
2研究目的
基于上述情况我们选择了遥控搬运机器人来进行研究,一方面也是为了解决农村劳动力日益减少的问题,另一方面是为了使机器人的使用推广并深入到人群中。
当然,此种类型的机器如用于快递搬运的智能分拣机器人,便可以将快递取出并根据设定好的程序算法扫描然后将快递带到指定位置。再如,武警部队中的拆弹机器人,通过电脑控制机器人去拆除炸弹。该机器人结构精密,可通过电脑远程操控,亦可搬运一些小型物体。然而这两种种机器人却并不适用于农村,也不适合推广深入到人们的日常生活中。二者各有利弊,前者成本低适用范围广泛但作用单一,后者成本高结构精密但可以应用的范围广泛。
本文所设计机器人通过单片机编写操控程序,再通过手机进行操控,方便快捷,可以解放老人的劳动力。利用步进电机来实现机械手的自由旋转,使机械手实现在水平方向移动;通过电磁阀控制气缸与真空吸盘是机械手实现垂直方向的移动和吸取的动作。
3遥控搬运机器人的整体设计构思
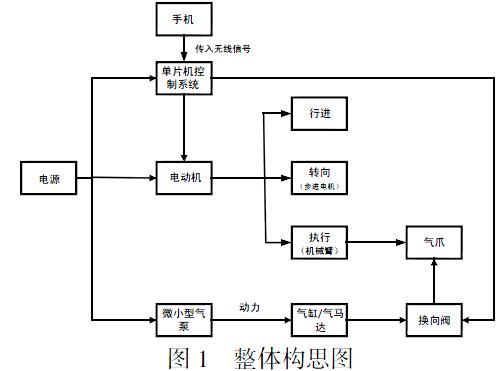
本机器人包含电动、气动,并将电动与气动结合为一体,通过APC220模块[1]接受手机信号并传输至STC89C52单片机进行统一控制。机器人采用模块化设计分为供给模块、行进模块、执行模块、控制模块四个模块。以控制模块为技术核心,其余三个模块为辅,采用机电一体化技术通过控制模块接受手机信号支配其余三个辅助模块实现需要完成的运动。
出于本机器人设计的初衷,即为了更好的解放农村孤寡老人的劳动力与在人群中更好更深入的推广应用机器人,所以本文所设计的机器人各部分零件会尽量采用通用型的,以便于维修与更换同时也可以降低制作成本。
采用智能手机蓝牙控制而不采用遥控器的原因:现代社会智能手机几乎人手一部,而且使用遥控器需要额外的给遥控器加装电源,而且无形中增加了成本与耗材,再者遥控器一旦损坏不易维修。相反采用智能手机蓝牙控制则没有这方面的顾虑,不需要特地的制作遥控器的硬件与编程,只需要开发相应的手机控制软件就可以,甚至可以通过其他类似的软件进行兼容。
由于考虑到机器人未来主要应用的人群与场景多位老人现场通过手机来操纵,所以在机器人前面加装摄像头便显得有些鸡肋了,更会使制作成本与难度增加,所以本机器人并没有加装摄像头。
4硬件设计
4.1供给模块
供给模块,它又分为分为电源和气源。
电源我们采用48V(3*16V或4*12V)20A的电池,为节省成本我们采用传统的性价比高的铅酸蓄电电池,并且由于铅酸电池重量较大可加大机器人基座自重,能够有效防止机器人搬运重物时失重倒地。再者由于48V20A铅酸电池多用于普通电动车三轮车,所以不需要专门去配充电器,非常适用于农村。且电源不仅要提供机器人前进的动力还要提供气泵所需动力。
气源我们采用DC24V小型空压机,因为空压机主要为气爪夹持物体提供动力,这就使得对空压机压力要求变低,意味着空压机的体积、重量并不是特别大。机器人整体的体积与重量也就减少了很多。
4.2行进模块
行进模块采用2个24V直流驱动电机,置于前两个轮,后两个车轮采用万向轮。我们通过L293D芯片控制驱动电动机,該芯片驱动方式比较简单,由美国德州仪器(Texas Instruments)生产的微型电机驱动集成电路芯片,支持Vcc 4.5~36V,最大输出电流为1A[2],正好适用于我们24V直流驱动电机直接驱动两个前轮连接的两个直流电机。为适应农村地形,所以需要对车轮加装履带以加大摩擦力,防止车轮与地面产生相对转动。
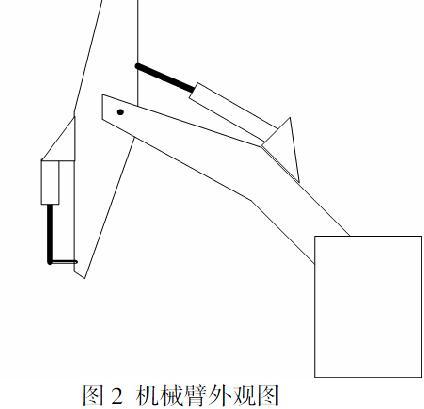
4.3执行模块
执行模块由机械臂和步进电机构成,步进电机置于机械臂下方一个步进电机。步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。其次它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。步进电机主要用于连接底座并控制机械臂的方向,通过逻辑门电路给步进电机提供电子脉冲。
机械臂上通过双作用单出杆活塞式气缸来调节机械臂的伸缩。由于电动抓取物体不能很好的掌控力度,也不能抓取不规则形状的物体如鸡蛋、玻璃杯等,所以这款机器人的机械爪采用多个真空吸盘组合。
5软件设计(控制模块)
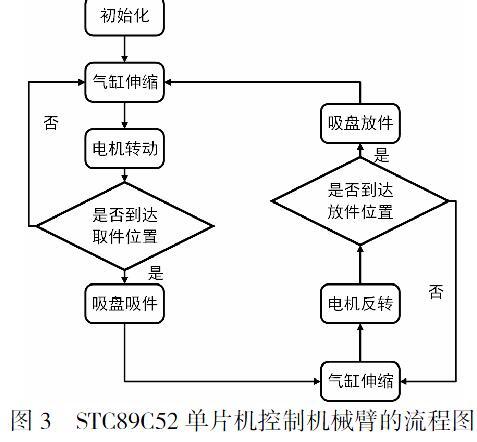
控制模块通过单片机接受手机控制平台发出的前进、后退左右转向、机械臂伸缩及抓取物体的信号并传输至STC89C52单片机进行统一控制。控制电路、气路及各元件完成相应动作以达到我们所需要机器人完成的一个个具体的动作。
手机控制平台是开发该控制系统的手机APP软件,手机与机器人的信息传递通过蓝牙技术实现。控制模块以89C52RC单片机为控制核心STC89C52RC是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8K字节系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但是做了很多的改进使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52
为众多嵌入式控制应用系统提供高灵活、超有效的解决方案[3]。
下面是小车的行进部分的部分程序:
case 'A': //前进
P0=0xf5;//P0的低四位控制驱动芯片,当接收到0101時,两个轮子正转,故向前,以下同。
break;
case 'B': //右转
P0=0xf9;
break;
case 'C'://左转
P0=0xf6;
break;
case 'D'://后退
P0=0xfa;
break;
6结语
本文介绍的遥控搬运机器人主要针对的是农村劳动力日益减少这一问题,相比于普通的快递行业中的智能分拣机器人适用范围更为广泛,比拆弹机器人结构更加简单,更易于操作,成本更低。本机器人甚至不仅仅局限于农村帮助老弱,还适用于其他地方。再者采用真空吸盘抓取物体更能有效避免纯电动机械手抓取易碎物体时的失误,更为安全可靠,结构为更为简单。并且零件的通用性使得其便于维修与更换零件。
参考文献
[1]臧莹.基于单片机的无线遥控移动机器人[J].科技风,2018(23):3.
[2]陈强,冯毅,李文. 基于单片机控制的气动机械手设计[J]. 液压气动与密封,2018,38(2).
[3] 朱涛. 基于STC89C52单片机的智能循迹小车设计[J]. 电脑知识与技术,2011,07(31):7751-7753.
(作者单位:山东英才学院机械与电气工程学院)