车载GPS/DR组合导航及地图匹配修正技术研究
2018-04-26周瑞华高意峰
周瑞华,高意峰
(深圳市凯立德科技股份有限公司,深圳 518040)
1 常见车载导航技术
在现代车辆出行过程中,导航定位技术已经广泛普及。比较典型的方式是采用GPS定位技术,并将解算位置在数字地图中转换为道路信息。带有导航路径规划功能的更进一步,还可以根据当前位置,目的地位置,地图道路分布计算出最优或较优的行驶路径供驾驶员参考。
然而GPS定位系统在市区或类似环境工作时,容易受到诸如高楼等建筑物的方向性遮挡影响,导致定位精度差(星的几何分布不佳)或者无法定位(可见星数目小于4),这时就需要通过一些辅助导航系统来保证定位模块提供更为稳定、精确的位置输出,为后续服务提供可靠的数据保证。
车载GPS/DR组合导航系统[1]就是一种典型的解决方案,利用GPS和里程计,航向陀螺等传感器,采用Kalman滤波技术构成组合导航系统,可以在GPS没有信号时,短时间内提供一定精度的定位结果。同时可以通过地图匹配修正技术,获得更高精度,更加稳定的导航位置。
典型的组合导航系统如图1所示:

图1 车载组合导航系统
2 GPS/DR组合导航技术
车载GPS/DR组合技术中,航位推算(Dead Reckoning,DR)系统的配置一般有两类:一类是里程计加航向陀螺的配置[2];一类是加速度计加陀螺仪的MEMSIMU配置[3]。相对而言里程计加航向陀螺的模型较为简洁,通用性强,故以此为基础进行设计。
2.1 系统模型
状态变量选择为:

表1 GPS/DR组合导航系统状态变量表
动态方程为:

2.2 观测模型
观测变量为:
那么观测向量Y=[λ φvH SΔNodoVRG]T。

表2 GPS/DR组合导航系统观测变量表
观测方程为:
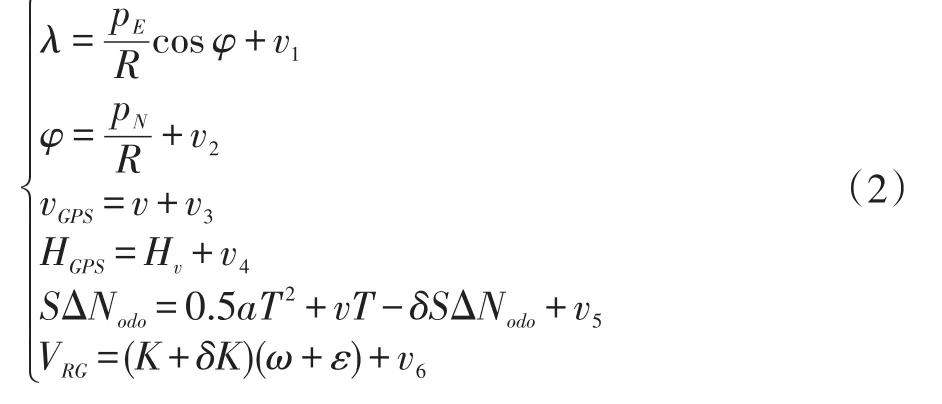
简写为:

2.3 滤波算法
扩展Kalman滤波中要对非线性方程离散、线性化;这个过程必须满足F,H阵和真实值非常接近。可以通过下面的方法判断线性化是否有效:

当上述条件不满足时,EKF计算的协方差会趋向于过度优化,最终导致系统发散。初始化误差协方差矩阵时最容易发生,故当处于临界有效及初始化状态时,可以通过增大噪声协方差矩阵来提供补偿。
GPS/DR的EKF算法如下:
(1)初始化:

(2)状态预测:

(3)新息更新:

3 地图匹配修正技术
在地图匹配算法[4]中,系统比较其他导航系统给出的位置结果和数字公路地图,当导航结果偏离公路时,可以获取垂直于公路方向的位置修正。在某些特殊路段,如果沿路段进行拐弯,那么利用此段匹配可以获得两个方向的修正结果。

图2 地图匹配算法流程
4 组合导航技术的自动驾驶扩展
上述导航系统的定位精度一般可以稳定在10m左右,而且对于短时间丢失导航卫星数据也具有良好的适应性。如果在加上激光测距雷达和机器视觉系统(摄像成像)那么就可以构成一个简要版本的自动驾驶传感器组扩展,进一步实现车道级别的导航定位功能。

图3 车载组合导航系统的自动驾驶扩展
参考文献:
[1]GNSS与惯性及多传感器组合导航系统原理.Paul D.Groves.国防工业出版,2015.
[2]L.Zhao,W.Y.Ochieng,M.A.Quddus and R.B.Noland.An Extended Kalman Filter Algorithm for Integrating GPS and Low-Cost Dead Reckoning System Data for Vehicle Performance and Emissions Monitoring.Journal of Navigation,2003,56(2):257-275.
[3]SY Cho,SC Wan.Robust Positioning Technique in Low-Cost DR/GPS for Land Navigation.IEEE Transactions on Instrumentation&Measurement,2006,55(4):1132-1142.
[4]MA Quddus,WY Ochieng,L Zhao,RB Noland.A General Map Matching Algorithm for Transport Telematics Applications.Gps Solutions,2003,7(3):157-167.
