永磁同步电机的自适应预测比例–积分–谐振电流控制
2018-04-16于子淞王大志陶冶
于子淞 王大志 陶冶
永磁同步电机(Permanentmagnetsynchronous motor,PMSM)功率密度高、电流输出转矩比小,被广泛应用于航天、数控机床等高精度调速场合[1−3].交流调速系统通常采用速度外环级联电流内环的控制结构.其中,电流控制性能决定了转矩控制精度和电机损耗.常规PID控制简单易行,但对系统参数和外界扰动的鲁棒性较差.针对这一缺点,文献[4−8]分别提出自适应PID 控制[4]、滑模控制[5]、无差拍控制[6]、预测控制[7−8],以提高电流控制精度和系统对电机参数、电压扰动的鲁棒性.
电机相电流谐波源可等效为周期电压扰动,扰动电压通常由电压源逆变器非线性畸变、转子非正弦反电动势和磁饱和等因素引起[9].重复电流控制策略[10]可有效抑制周期扰动电压,但当电机运行于低速时,存储一个周期内的电流数据占用系统内存较多.迭代学习控制[11]通过在线反复修正相电流幅值和相位,可完全消除谐波电流,但计算量较大.比例–积分–谐振电流控制策略(Proportionalintegral-resonant controller,PI-RES)[12]简单易行,可有效抑制周期扰动电压,已广泛应用于风力发电及交流调速领域.然而,这种常规的PI-RES控制器只是内模控制器的等效并联形式,并不是真正意义上的渐近稳定并联控制器.同时,数字控制系统存在一个采样周期的输入延时,当系统采样频率/电流输出频率(fs/fo)小于10时,电流将出现震荡失稳现象[13].文献[12]采用电流前馈补偿,消除了电流超调,但未对扰动进行预测补偿.文献[14]利用高阶滤波器最优逼近包含延时的系统误差模型,但系统采样频率低于2.5kHz时,电流不稳定.文献[15]在电流环中加入了有源阻尼衰减相,有效抑制了输入延时对解耦控制的影响.文献[16]采用二阶pade模型近似系统输入延时,通过最优配置系统根轨迹法削弱了输入延时对电流控制的影响,但未研究算法对模型参数的鲁棒性.
本文通过将多种PI-RES控制器化为统一的状态空间表达形式,分析系统输入延时对电流控制稳定性的影响.针对系统输入延时和电流谐波问题,提出一种自适应预测比例–积分谐振(Adaptive predictive proportional-integral-resonant,APPIRES)电流控制策略.该方法可在电机电阻、电感参数未知的情况下预测电流指令、电压扰动和电流控制误差.通过执行预测量的反馈控制,补偿系统输入延时和相电流谐波,算法收敛性分析保证了所提控制器的渐近稳定性.最后,通过仿真研究验证了所提算法的有效性.
1 输入延时对传统PI-RES控制的影响分析
1.1 表贴式PMSM电气模型
逆变器驱动永磁同步电机相电流通常包含6n±1(n为自然数)次谐波,可将电流谐波源等效为频率为6n±1次周期扰动电压,在同步旋转坐标系下该扰动电压频率为6n次[9].考虑控制器输入延时和周期扰动电压的同步旋转坐标系下表贴式PMSM电气模型:
式中,下标D表示延时时间,分别为t−D时刻d、q轴控制器输出电压指令,分别为t时刻d、q轴各次谐波扰动电压的总和,id、iq分别为d、q轴电流,R、L、ωe、ϕf分别为定子电阻、电感、转子电角速度和永磁体磁链.

式中
当电机运行于稳态时,d0为恒定值,d1为三角函数的级数和,因此扰动d可表示为
式中
1.2 传统PI-RES控制器的等效状态空间形式
传统PI-RES控制策略通过在系统谐振频率处并联谐振器,可实现无静差抑制系统周期扰动[9].这里为分析方便,令式(3)中n=0~2,则所需设计的PI-RES控制器可表示为[9,12,16]
式中,s为拉氏复变量,kp、ki、a0~a2、b0~b2分别为调节器参数.将式(4)中各项分式通分得:

式中

由文献[17]知,式(5)为内模控制器,系统模态可表示为

为分析方便,暂不考虑系统输入延时,即D=0,令ε=P(σ)z为扩展误差空间状态分量,由式(2)、(6)建立扩展电流误差空间方程[17]:

式中
其中,z(i)表示z的i阶导数,系数0为2阶零矩阵,I为2阶单位矩阵.由式(7)知,只需设计状态反馈矩阵Kr使Fc=F−GKr为Hurwitz矩阵,即可得到渐近稳定的内模控制器.由式(6)知,双输入系统(7)的解耦PI-RES控制器所对应的的状态反馈矩阵为

式中
其中,上标d、q分别对应直、交轴内模控制器参数,由系统矩阵A知,ωeL为耦合项,因此,Kε中ωeL为电流解耦项.
注.由式(5)~(8)知,PI-RES控制器需要合理选取并联谐振器的参数以保证系统渐近稳定.因此,PI-RES控制器并不是真正的并联型渐近稳定控制器.
1.3 输入延时对电流控制的影响
由第1.2节分析可知,考虑系统输入延时后,电流解耦PI-RES控制器所对应的状态反馈为

式中,eD=λ(t)e为t−D时刻误差状态,e为t时刻误差状态,λ(t)为等效延时系数矩阵.由式(9)得闭环误差空间系统为

式中,Fc1(t)=F−GKrλ(t)为扩展电流误差空间系统矩阵,λ(t)为对应维数的分块对角时变等效延时矩阵,其对角线元素所构成的矩阵为
式中,λ0、λ1、λ2、λ3和λε均为对角矩阵.
由式(8)~(11)知,考虑系统输入延时后的反馈矩阵为
由式(11)和(12)知,当λ(t)对角线元素为1时,系统矩阵Fc1(t)=Fc,即输入延时对系统无影响.当λ(t)对角线元素不为1时,系统矩阵Fc1(t)/=Fc,即输入延时对闭环系统的动态性能和稳定性产生了影响.例如,由式(8)和(9)知,kε对应比例反馈系数,当kε取值大于电机时间常数且λε(t)的系数小于零时,系统将发散.因此,需消除由输入延时引起的系统失稳隐患.
2 APPI-RES电流控制器设计
为消除系统输入延时对电流环稳定性的影响,实现低fs/fo工况下的渐近稳定并联谐振电流控制,需要对系统状态和扰动进行预测.
2.1 扰动预测
考虑电机电阻、电感参数未知,但其变化的界已知时,设计系统(2)的自适应谐振扰动观测器:
将式(2)和(13)做差得:

建立观测误差系统(15)的Lyapunov函数:
式中,Γ6n为正定对称矩阵,α、γ为正常数,tr(·)为求矩阵迹运算符号,P为正定对称矩阵,满足:

式中,Q为正定对称矩阵.为简化运算,取P=I2×2,I2×2为2阶单位阵.
对Lyapunov函数(16)求导得:
选择自适应率:
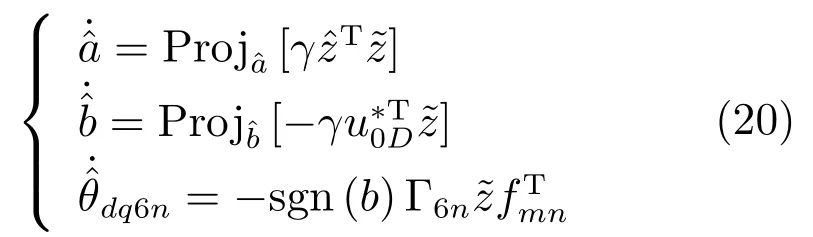
式中,sgn(·)为符号函数.
由式(17)~(20)知,<0,当t→∞时,→θdq6n,即观测系统渐近稳定.
由式(3)、(14)、(20)得扰动观测值:
频率已知、幅值和初始相位未知的正弦函数v(t)=Msin(ωt+ϕ0)满足:

当n/=0时,由式(21)和(22)得扰动预测值:

当n=0时,上式可简化为

2.2 状态预测
当t时刻误差系统状态z(t)已知时,t+D时刻误差系统状态可表示为[9]

式中
其中,µ(t+D)为t时刻零输入响应,δ(t+D)为t时刻零状态响应.进一步,将式(26)~(28)表示为状态空间形式:式中,δ(D)、µ(D)为系统初始状态.
由式(2)、(14)知,系统矩阵及其观测矩阵满足:

利用第2.1节所得系统参数和扰动的估计值得t+D时刻误差系统状态z(t+D)的预测值:

式中

2.3 稳定性分析
由式 (2)、(25)、(29)、(31)、(33)得系统状态预测误差:

由式 (30)、(31)、(34)、(35)得:

因此,当t→∞时,式(34)可化为
由第2.1节分析可知:
式中,λi为的特征值.由式(37)和(38)得:

设计控制器:

式中,状态反馈增益矩阵K保证AK=A−BK渐近稳定.闭环系统可表示为

因此,由式(38)~(40)知,式(41)为渐近稳定系统.执行APPI-RES电流控制策略的步骤如下:
步骤1.根据系统模型(2)建立自适应谐振扰动观测系统(13),t时刻参数自适应率和电压扰动分别为式(20)和(21).
步骤2.根据式(23)和(24)预测系统扰动,求得t+D时刻系统扰动.
步骤3.利用步骤1中参数自适应率和步骤2中的扰动预测值,根据(31)~(33)预测系统(2)在t+D时刻的状态.
注.系统未知参数慢变的假设条件可保证未知参数在t到t+D时间内不变.因此,由步骤1中系统未知参数自适应率(20)所求得t时刻系统估计参数可用于t+D时刻系统状态的预测.
步骤 4.根据(34)~(39)的稳定性证明可得t时刻系统渐近稳定控制器(40).
基于APPI-RES电流控制策略的PMSM系统框图如图1所示.
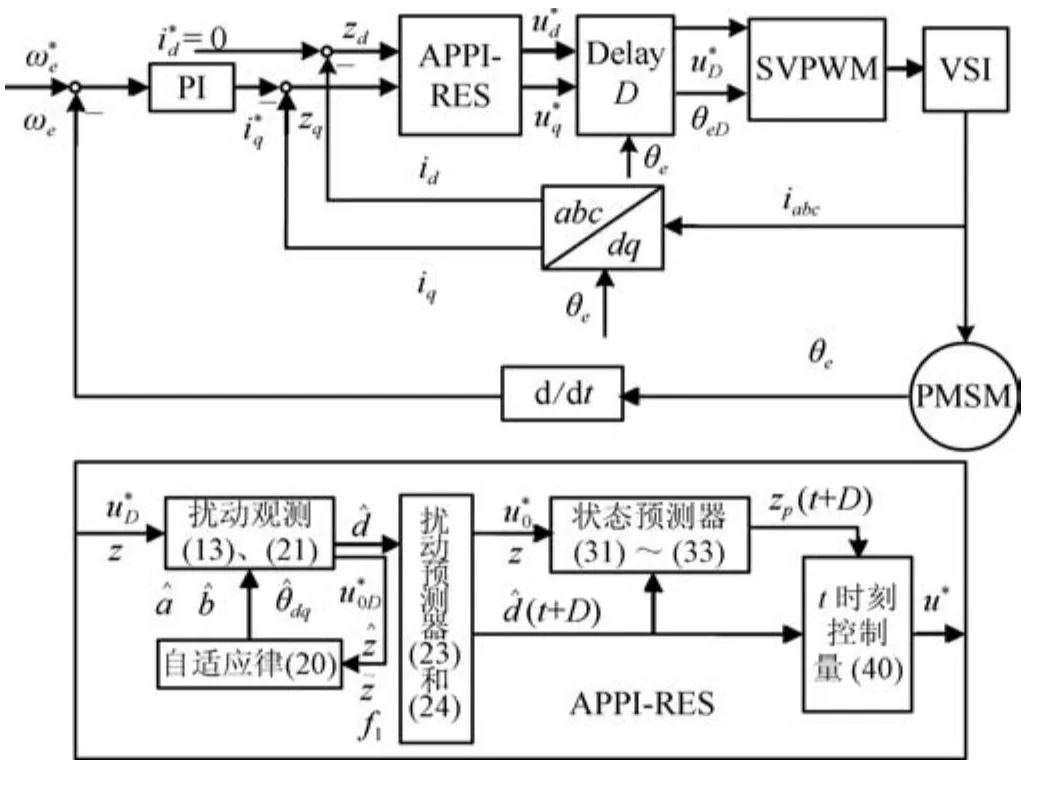
图1 采用APPI-RES电流控制器的PMSM驱动系统框图Fig.1 Block diagram of PMSM driving system using APPI-RES current controller
3 仿真研究
为验证APPI-RES电流控制器的有效性,在Matlab/Simulink仿真环境下搭建了永磁同步电机调速系统仿真平台.仿真中,永磁同步电机参数如下:定子电阻R=2.93Ω,定子d轴和q轴上的电感Ld=Lq=7mH,永磁体磁链ϕf=0.125Wb,转子磁极对数p=2,转动惯量J=1.16×10−4kg·m2,粘滞摩擦系数F=2.1×10−4N·m·s.系统其他参数如下:母线电压Vdc=400V,死区时间3µs,电流环采样时间100µs,速度环采样时间200µs.仿真验证中,速度环所用PI调节器的比例系数Kps=0.5,积分器系数Kis=10,电流环PI-RES控制器形式为:
3.1 小谐振增益下的PI-RES与APPI-RES电流控制对比仿真研究
根据前文的分析,小谐振器增益下,1个采样周期的延时不会使系统震荡.仿真中,只注入VSI死区产生5、7、11、13等奇次谐波电流.电机低速轻载运行时,VSI非线性畸变电压使相电流畸变较严重.因此仿真中电机负载0.1Nm,给定转速300r/min,模拟低速轻载运行工况.分别采用PI、PI-RES、APPI-RES电流控制器.其中,PIRES控制器参数为:kpc=20、kic=4500、kresn=2000,n=1~6.APPI-RES控制器参数为:式(13)中反馈增益阵G为对角阵,取G11=G22=10000,式(20)中γ=15000、Γ6n为对角阵,取Γ6n11=Γ6n22=10000,式(40)中K为对角阵,取K11=K22=20.如图2和3所示,PI电流控制器抑制VSI死区电压的能力较差,相电流中含有大量的6n±1次谐波,电流畸变率(Total harmonic distorition,THD)为22.79%.PI-RES和APPIRES控制器所并联的谐振器数量可根据电流控制精度和运算速度折中选取.这里选择并联谐振器数量为6,即谐振器只能消除36±1次之前的谐波电流.由图4~7知,PI-RES和APPI-RES两种电流控制器都能很好地抑制6n±1次谐波电流,THD分别为1.85%和1.56%.由第1.2节、第1.3节分析可知,在小谐振器增益情况下PI-RES控制器可保证系统渐近稳定,且仿真所取延时时间较小,扰动电压在延时时间内变化小,因此,PI-RES控制器能够实现较高精度的电流控制.仿真结果同样验证了第2.2节中对所提APPI-RES电流控制策略理论分析的有效性.
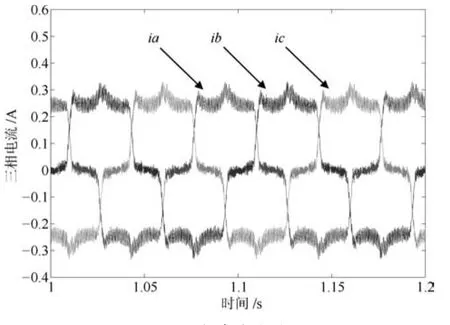
图2 相电流(PI)Fig.2 Phase currents(PI)
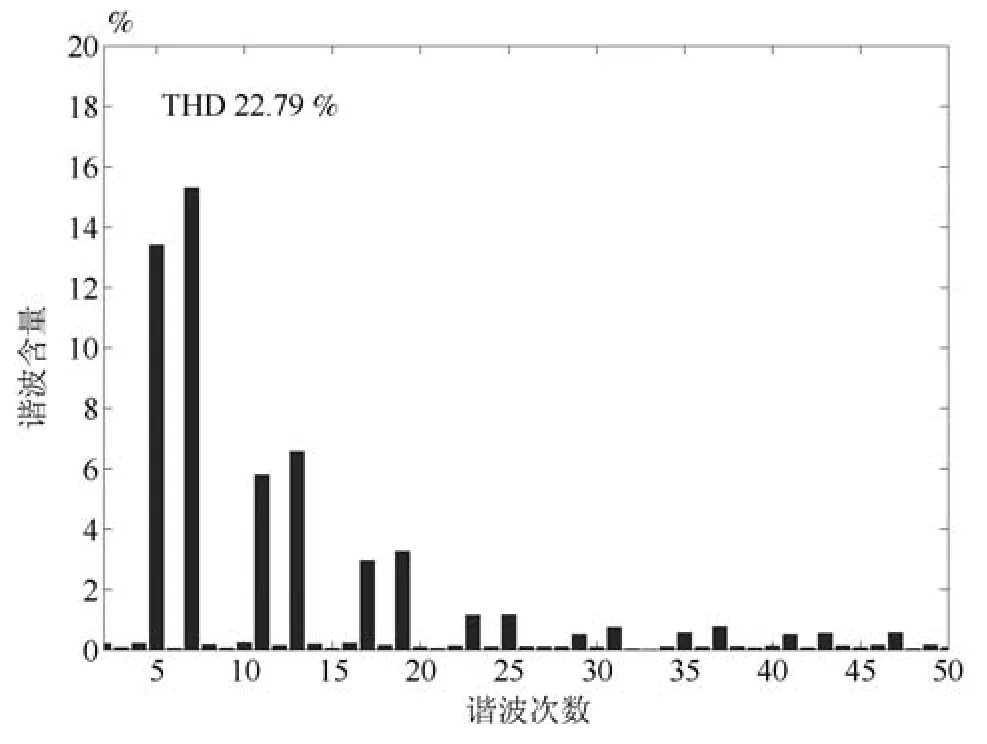
图3 相电流频谱(PI)Fig.3 Frequency spectrum of phase current(PI)
3.2 大谐振增益下的PI-RES与APPI-RES电流控制对比仿真研究
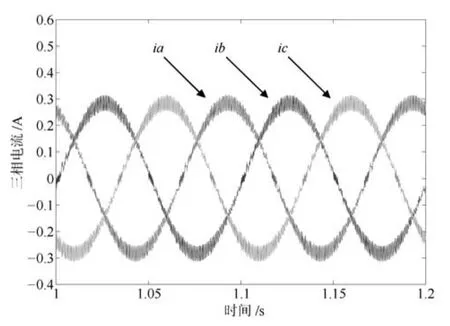
图4 相电流(PI-RES)Fig.4 Phase currents(PI-RES)
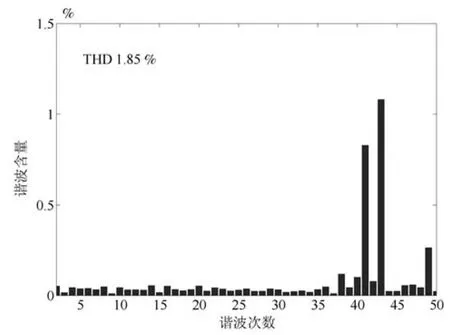
图5 相电流频谱(PI-RES)Fig.5 Frequency spectrum of phase current(PI-RES)
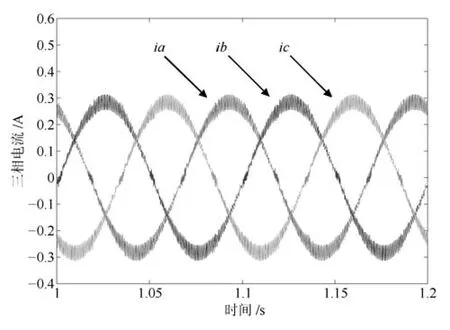
图6 相电流(APPI-RES)Fig.6 Phase currents(APPI-RES)
级联型PMSM 调速系统要求电流环响应速度远快于速度环响应速度.为了更快、更准控制电机电流,需要增大电流环控制器增益系数.这里,PI-RES控制器的参数中kpc和kic取值与第3.1节相同,但取kresn=4000,n=1~6.PI-RES控制器中谐振器增益增大后,导致其输出电压振荡,进而引起电流、电磁转矩和转速的振荡,如图8~11所示.为了验证APPI-RES控制器对输入延时的补偿效果和大范围参数不确定的鲁棒性,增大APPI-RES控制器的谐振器增益并将电机电阻和电感设置为标称值的3倍和2倍.由第2.1节分析知,所提参数自适应辨识算法需已知未知参数的界,这里假设系统未知参数 ˆa、ˆb分别满足:ˆa∈[−800,−50]、ˆb∈[50,500]. 所选未知参数的界应满足:ˆa的界恒为负,ˆb的界恒为正.这里所选ˆa、ˆb的界只为验证所提算法的有效性,即界的选取不唯一.APPI-RES控制器参数选为:式(13)中反馈增益阵G为对角阵,取G11=G22=15000,式 (20)中γ=25000,Γ6n为对角阵,取Γ6n11=Γ6n22=18000,式(40)中K为对角阵,取K11=K22=60.由图12~14可见,当t=0.3s时负载由0.1Nm突变为0.2Nm,速度PI控制器级联APPI-RES电流器的控制策略可有效抑制电压扰动,消除谐波电流,实现了快速、准确的电流、转矩和转速控制.图16为t时刻q轴电流控制误差zq与t−D时刻zq的预测值zqp的仿真结果.可见,所提预测算法能够实现渐近稳定的电流误差预测.然而,在电机起动过程中,预测值与真实值符号相反,即控制器执行短时正反馈,这造成了起动过程中的短时电压振荡现象,如图15所示.
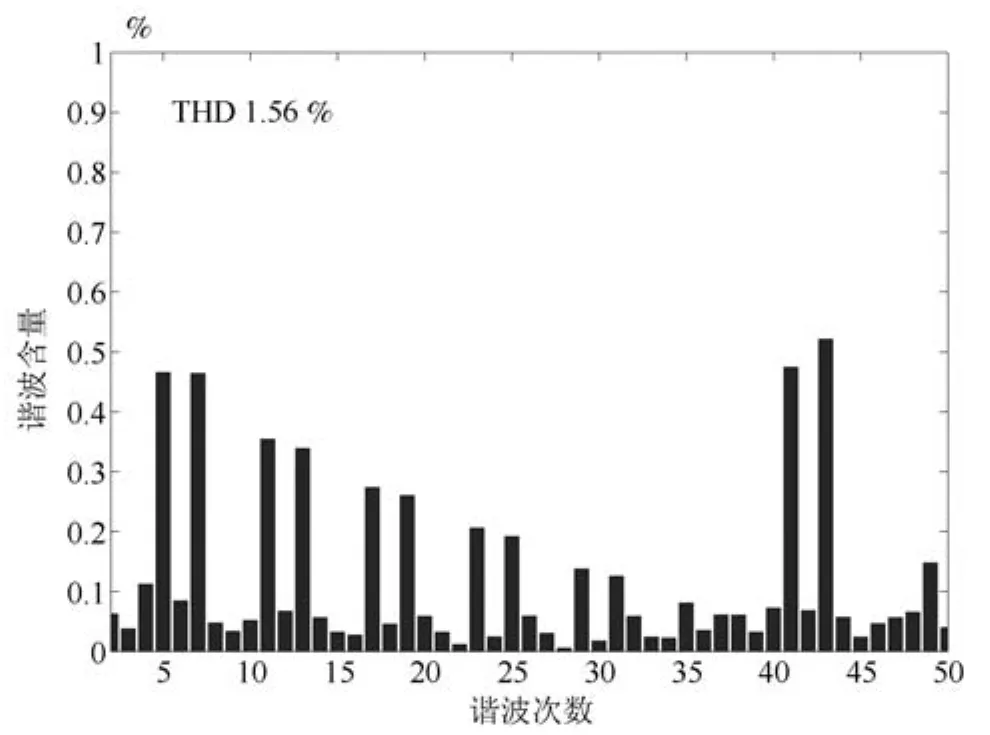
图7 相电流频谱(APPI-RES)Fig.7 Frequency spectrum of phase current(APPI-RES)
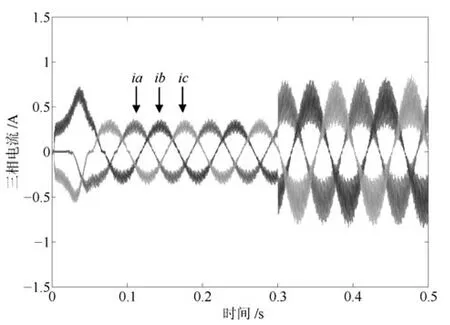
图8 相电流(PI-RES)Fig.8 Phase currents(PI-RES)
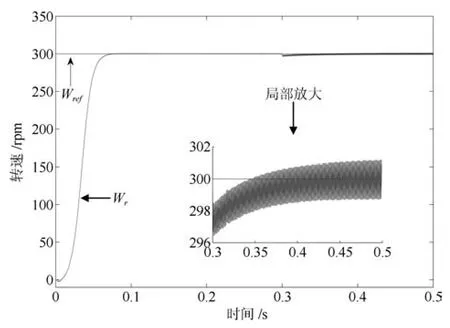
图9 转速(PI-RES)Fig.9 Speed(PI-RES)
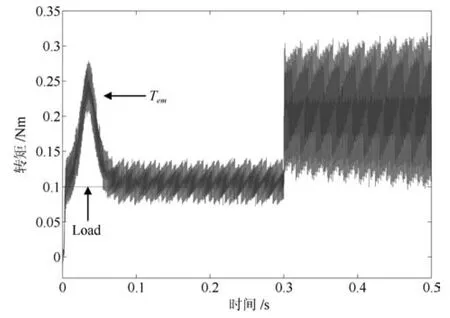
图10 转矩(PI-RES)Fig.10 Torque(PI-RES)
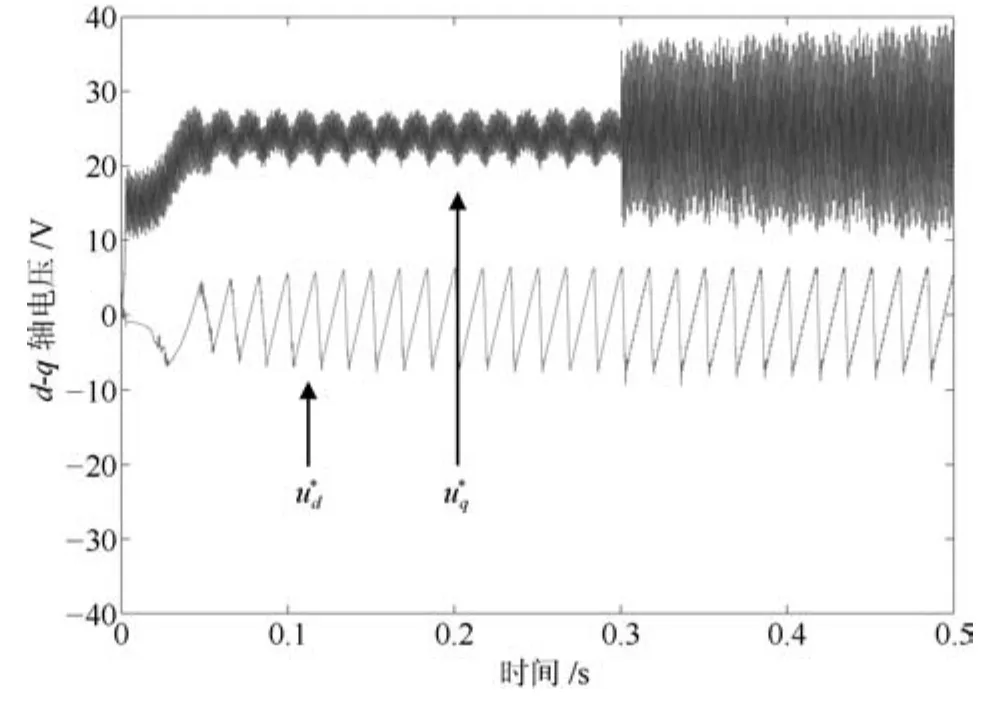
图11d-q轴电压(PI-RES)Fig.11 Voltages ofd-qaxises(PI-RES)
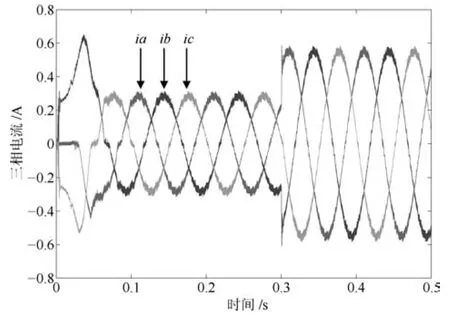
图12 相电流(APPI-RES)Fig.12 Phase currents(APPI-RES)
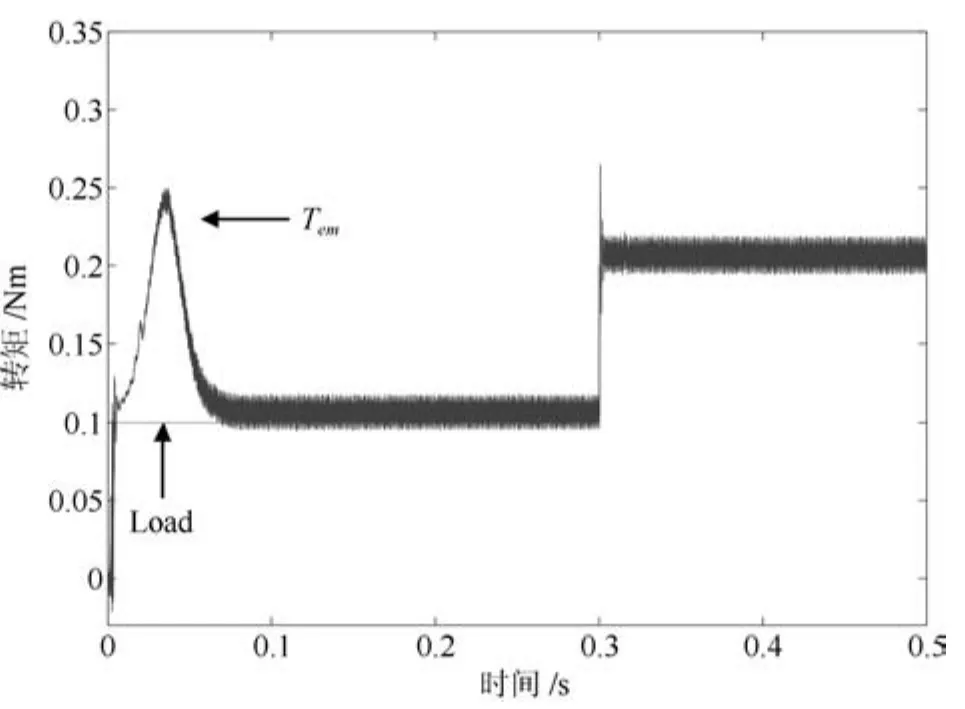
图13 转矩(APPI-RES)Fig.13 Torque(APPI-RES)
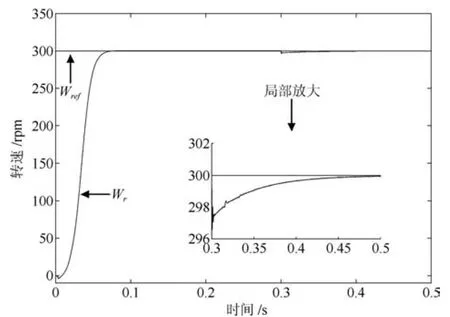
图14 转速(APPI-RES)Fig.14 Speed(APPI-RES)
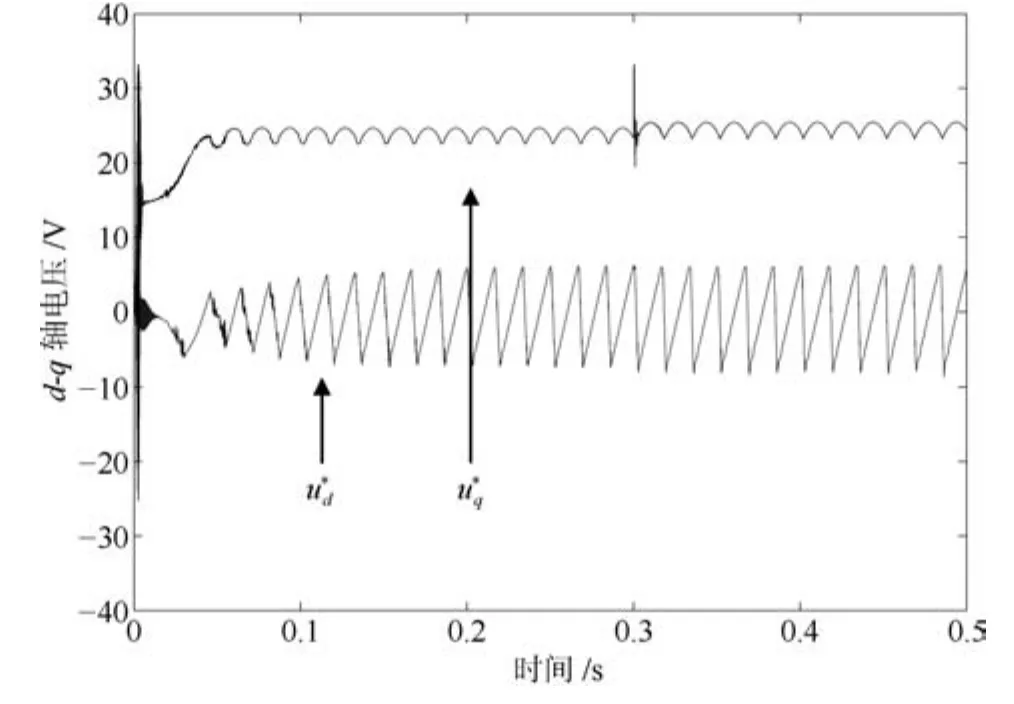
图15d-q轴电压(APPI-RES)Fig.15 Voltages ofd-qaxises(APPI-RES)
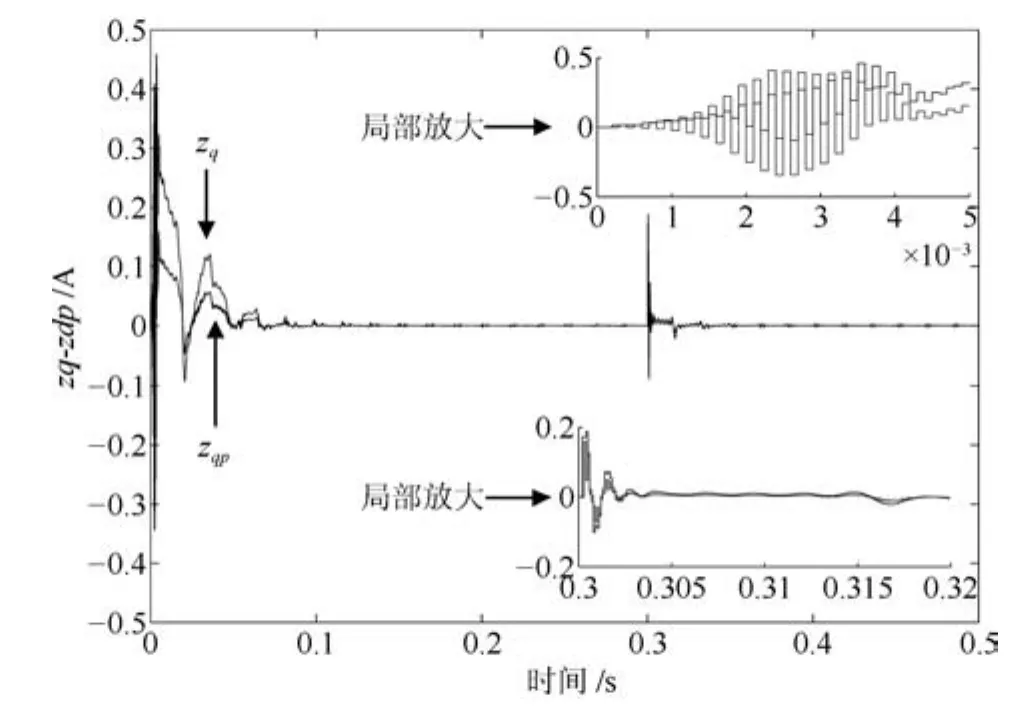
图16q轴电流误差及其预测值(APPI-RES)Fig.16 Current error and its predictive value ofqaxis(APPI-RES)
4 结论
1)在fs/fo工况下,PI-RES电流控制器受系统输入延时的影响,将出现电流振荡或不稳定现象.基于电流误差系统状态空间模型给出了常规PI-RES电流控制器设计方法,并分析了输入延时降低解耦性能和使系统失稳的本质原因.
2)提出APPI-RES电流控制策略,实现对系统输入延时的补偿和扰动电压的抑制.该方法可在系统参数未知的情况下观测系统扰动和预测系统状态.
3)所提方法是一种真正意义上的渐近稳定并联型控制策略,实际应用中可通过电流控制精度和计算时间要求这种选择并联核函数的数量.
1 Chou M C,Liaw C M.Dynamic control and diagnostic friction estimation for an SPMSM-driven satellite reaction wheel.IEEE Transactions on Industrial Electronics,2011,42(10):4693−4707
2 Abdel-RadyY,MohamedI.Anewlydesigned instantaneous-torquecontrolofdirect-drivePMSM servoactuatorwithimprovedtorqueestimationand control characteristics.IEEE Transactions on Industrial Electronics,2007,54(5):2864−2873
3 EL-Refaie A M.Fractional-slot concentrated-windings synchronous permanent magnet machines:opportunities and challenges.IEEE Transactions on Industrial Electronics,2010,57(1):107−121
4 Jung J W,Leu V Q,Dot D,Kim E K,Choihh.Adaptive PID speed control design for permanent magnet synchronous motor drives.IEEE Transactions on Power Electronics,2015,30(2):900−908
5 Chang Sh,Chen P Y,Ting Yh,Hung S W.Robust current control-based sliding mode control with simple uncertainties estimation in permanent magnet synchronous motor drive systems.IET Electric Power Applications,2010,4(6):441−450
6 Niu Li,Yang Ming,Wang Geng,Xu Dian-Guo.Research on the robust current control algorithm of permanent magnet synchronous motor based on deadbeat control principle.Proceedings of the CSEE,2013,33(15):78−85(牛里,杨明,王庚,徐殿国.基于无差拍控制的永磁同步电机鲁棒电流控制算法研究.中国电机工程学报,2013,33(15):78−85)
7 Errouissi R,Ouhrouche M,Chen Wh,Trzynadlowski A.Robust nonlinear predictive controller for permanentmagnet synchronous motors with an optimized cost function.IEEE Transactions on Industrial Electronics,2012,59(7):2849−2858
8 Kong Xiao-Bing,Liu Xiang-Jie.Efficient nonlinear model predictive control for permanent magnet synchronous motor.Acta Automatica Sinica,2014,40(9):1958−1966(孔小兵,刘向杰.永磁同步电机高效非线性模型预测控制.自动化学报,2014,40(9):1958−1966)
9 Wang En-De,Huang Sheng-Hua.Current Regulator design for surface permanent magnet synchronous motor servo systems.Proceedings of the CSEE,2012,32(33):82−88(王恩德,黄声华.表贴式永磁同步电机伺服系统电流环设计.中国电机工程学报,2012,32(33):82−88)
10 EscobarG,Hernandez-BrionesPG,MartinezPR,Hernandez-Gomez M,Torres-Olguin R E.A repetitive-based controller for the compensation of 6l±1 harmonic components.IEEE Transactions on Industrial Electronics,2008,55(8):3150−3158
11 Kuang Min-Chi,Zhu Ji-Hong,Ji Jing-Hua.Phase current distortion correction control for aerospace fuel pump motor.Control and Decision,2015,30(5):899−904(匡敏驰,朱纪洪,吉敬华.航空油泵电机的相电流畸变纠正控制.控制与决策,2015,30(5):899−904)
12 Li Yi-Tuo,Lu Hai-Feng,Qu Wen-Long,Sheng Shuang.A permanent magnet synchronous motor current suppression method based on resonant controllers.Proceedings of the CSEE,2014,34(3):423−430(李毅拓,陆海峰,瞿文龙,盛爽.基于谐振调节器的永磁同步电机电流谐波抑制方法.中国电机工程学报,2014,34(3):423−430)
13 McGrath B P,Parker S G,Holmes D G.High-performance current regulation for low-pulse-ratio inverters.IEEE Transactions on Industry Applications,2013,49(1):149−158
14 Vidal A,Freijedo F D,Yepes A G,Fernandez-Comesana P,Malvar J,Lopez O,Doval-Gandoy J.Assessment and optimization of the transient response of proportional-resonant current controllers for distributed power generation systems.IEEE Transactions on Industrial Electronics,2013,60(4):1367−1383
15 Yim J S,Sul S K,Bae Bh,Patel N R,Hiti S.Modi fi ed current control schemes for high-performance permanentmagnet ac drives with low sampling to operating frequency ratio.IEEE Transactions on Industry Applications,2009,45(2):763−771
16 Yepes A G,Vidal A,Malvar J,L´opez O,Doval-Gandoy J.Tuning method aimed at optimized settling time and overshoot for synchronous proportional-integral current control in electric machines.IEEE Transactions on Power Electronics,2014,29(6):3041−3054
17 Franklin G F,Powell J D,Emami-Naeini A[Author],Zhu Qi-Dan,Zhang Li-Ke,Yuan Xin[Translator].Feedback Control of Dynamic Systems(Fourth Edition).Beijing:Publishing House of Electronics Industry,2004.401−408(Franklin G F,Powell J D,Emami-Naeini A[著],朱齐丹,张丽珂,原新[译].动态系统的反馈控制.第4版.北京:电子工业出版社,2004.401−408)
18 L´echapp´e V,Moulay E,Plestan F,Glumineau A,Chriette A.New predictive scheme for the control of LTI systems with input delay and unknown disturbances.Automatica,2014,52:179−184
