基于信号灯状态的燃油最优车速规划与控制
2018-04-16张博郭戈王丽媛王琼
张博 郭戈 王丽媛 王琼
近年来,城市道路车辆数量迅速增加,能源消耗和环境污染问题日趋严重,如何缓解交通压力,减少汽车油耗及尾气排放已成为亟待解决的重要问题[1].车辆油耗不仅受发动机性能、路况及天气影响,行驶过程的速度控制也直接决定着油耗的多少.燃油高效的车辆行驶控制方法已成为智能交通系统(Intelligent transport systems,ITSs)领域的研究热点之一,受到学术界和汽车制造商的极大关注.
仅2014年我国汽车销量为2349.19万辆,其中乘用车销量为1970.06万辆,新能源汽车销售量为74.763万辆[2],由此可见传统燃油乘用车仍然是汽车行业的中流砥柱.本文关注对家庭普通燃油乘用车的能耗和驾驶特性的研究和分析.经过长期的发展,ITS在诸多方面已取得显著进展,例如,利用通信和传感技术的避碰系统[3]、可自动调节速度保持安全车距的自适应巡航控制[4]、更注重燃油效率的合作自适应巡航控制[5]等.上述技术的发展和应用扩大了路容,增强了交通安全[6],也在一定程度上提高了燃油利用率.近年来,传感器技术和智慧道路的推广应用促生了先进驾驶辅助系统(Advanced driver assistant systems,ADAS),它帮助驾驶员对路况和交通状况做出更准确及时的判断,从而进一步降低车辆油耗[7].随着人们环保意识的增强,利用交通信息降低燃油消耗的环保驾驶技术日益受到关注[8].环保驾驶策略可根据复杂多变的交通环境,给驾驶员提供油耗最优的车辆驾驶方案[9].早期的环保驾驶策略只给出“加速”和“减速”等简单操纵建议,如文献[10]提出的驾驶辅助系统可基于道路及驾驶习惯等信息为驾驶员提供合理的驾驶建议.实验表明,利用环保驾驶技术可减少10%~15%的油耗和20%的空气污染[11].文献[12]考虑行车时间和效率要求,提出一种兼顾油耗和行车时间的环保驾驶辅助系统策略,避免了以牺牲行车时效来降低油耗,实现油耗与时间的平衡.文献[13−14]将油耗优化问题转化为最优速度控制问题,通过动态规划方法获得燃油最优的行车路径.文献[15]根据驾驶行为分析提出一种更为环保的改进动态规划方法.另外,基于交通环境预测降低油耗的环保驾驶技术也受到普遍关注[16],比如,文献[9]考虑道路坡度对汽车油耗的影响,提出一种基于路况信息预测的环保驾驶策略,文献[17−18]通过预测前车加速度和速度来调节车辆速度,从而减少油耗.
在城市道路中,信号灯状态对车辆油耗起着至关重要的影响.如果车辆行驶中能利用前方交通信号灯状态及切换周期,则可避免红灯前的空转和频繁启/停操作造成的额外油耗.这样的环保驾驶技术可更好地适应城市交通环境.车–车(V2V)及车–路(V2I)通信技术[19]使得车辆行驶中获取前方信号灯信息成为可能.最近已出现基于信号灯的车辆速度和轨迹规划方面的研究成果,文献[20−21]基于信号灯状态提出可使车辆连续通过尽可能多绿灯的一种智能驾驶策略,从而降低油耗;文献[22]采用局部最优化的方法,在降低油耗的同时保证给定的行车时间要求.上述方法都是通过保持稳定的速度而间接实现节能目标的,忽略了车辆驶往目的地过程中的速度变化,控制器设计的重点在于提高速度跟踪性能.事实上,降低车辆油耗的关键是尽可能减少刹车频率,保证车辆尽量以恒定速度行驶,且避免过大的加速度[18].可见,已有成果并未充分考虑信号灯状态及其切换周期,以及车辆加减速和频繁起停对油耗的影响.
本文提出一种基于信号灯状态及切换周期信息的燃油最优行驶控制方法.结合信号灯以及当前交通状态,基于车辆速度、加速度以及与信号灯的距离,获得车辆在信号灯路段的最优速度规划.以此速度为实际行驶时的参考速度,基于车辆纵向运动的动力学模型以及综合速度跟踪误差和油耗指标,提出可保证燃油最优的车辆行驶速度模型预测控制方法(Model predictive control,MPC).本文主要创新点如下:
1)在基于信号灯的速度规划部分,制定了细致严谨的速度切换规则,获得免停车平稳通过信号灯的最佳速度规划.
2)同时考虑了信号灯状态及周期信息、速度跟踪误差及车辆油耗,获得最优车辆行驶控制策略.
3)性能指标中的参考速度根据信号灯状态实时动态规划,有利于实际城市交通应用.
本文结构如下:第1节建立了车辆动态模型,提出油耗模型及性能指标;第2节基于信号灯信息预测,给出车辆免停车且平稳通过绿灯的速度规划,以及实现该目标速度的MPC控制方法;第3节是仿真实验验证与分析;第4节为本文结论.
1 问题描述及目标
1.1 车辆建模
根据牛顿第二定律,建立车辆纵向动力学模型[23]:
其中,[p,v,a]分别是车辆的位置、速度和加速度,F是车辆的驱动力,其大小与车辆加速度有关,ρ是空气密度,A是车辆横截面积,Cd是空气阻力系数,cr是滚动摩擦系数,θ(p)是道路坡度角.本文考虑在城市道路环境中的车辆纵向驾驶情况,所以θ通常很小,可以近似表示为:cos(θ(p))≈1,sin(θ(p))≈θ(p).g是重力加速度,m是车的质量.
另外,由文献[24]可知,车辆的发动机模型如下:
其中,δ是发动机的时间常数,c是车辆的节气阀输入量.由式(1)和式(2)得到:
对式(1)关于加速度a求导后,得到关系式:m˙a=˙F−ρACdva,将其代入式(3)得:
引入如下反馈线性化控制器:c=,其中u为引入的控制输入,其与加速度大小相关,于是可将车辆动态特性描述为如下状态空间方程:
其中,状态向量x=[p,v,a]T,u为车辆的控制输入,
1.2 油耗模型
随后建立车辆的油耗模型,车辆的油耗与发动机的转矩、传动比、温度等因素有关,实际的油耗方程十分的繁琐复杂.本文以每千瓦时能量输出的燃油量来评价发动机燃油经济性,采用如下油耗模型,得到近似油耗方程[18]:
其中,fCruise表示在稳定速度v下每秒的巡航油耗,fAccel表示在速度v时加速度的存在所产生的加速油耗.
1.3 控制目标
本文的目标是设计外部控制输入u,使下述油耗及误差指标达到最优:

其中函数Ψ定义为

其中,q、r和w为权重系数,vtarget是根据信号灯信息得到的参考速度.为了确保车辆能够在单位油耗下尽可能匀速驾驶最大的距离,在性能指标中,我们选取巡航时的油耗fCruise而不是整体油耗[17],这样就可以减少加速度的产生和变化,使得车辆尽可能以恒定速度维持匀速驾驶.
2 基于信号灯预测的车速规划与优化控制
2.1 基于信号灯信息的速度规划
假设车辆与信号灯之间可以通过专用短距离无线通信技术进行通信[25],本节的目的是基于车辆获得的信号灯状态、相位和时间等信息,为车辆规划油耗最优的行车速度.这一过程须遵循如下规则[26]:
a)应尽可能避免频繁加速/减速操作;
b)应避免急刹车/急加速情况;
c)应尽量减少红灯前停车等待,保证绿灯时通过信号灯;
d)任何情况下车辆都应符合道路交通安全规范.
为了便于分析,将信号灯状态分为红灯和绿灯两种.假设车辆进入通信范围的时刻为t0,速度为v0,且与交通灯相距Dm,信号灯的循环周期为ζ,ζ=1,2,···,tgζ代表第ζ个循环时绿灯的开始时刻,trζ代表第ζ个循环时红灯的开始时刻.
当前信号状态及变化周期如图1所示,其中纵轴代表信号灯与初始位置的距离,横轴代表时间.
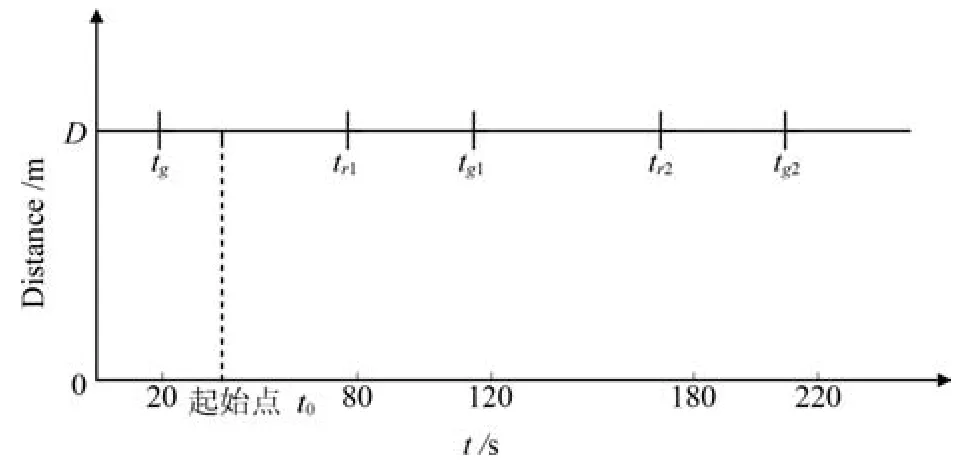
图1 信号灯循环状态Fig.1 The state of the traffic light cycle
为了更直观地表示信号灯变化周期,这里引入正弦函数表示信号灯的红绿灯变化过程,正半周(函数值大于零时)表示红灯,负半周(函数值小于零时)表示绿灯.
设定车辆通过信号灯的时间为tpass,如果车辆不能以当前速度匀速通过该信号灯,则车辆通过该路段的过程可描述为:车辆以恒定加速度/减速度a运动 ∆t时间后,达到速度vl,速度vl=v0+a∆t,此时车辆行驶的距离为D′=v0∆t+a∆t2;此后,车辆以速度vl匀速行驶剩下的距离,驾驶时长为tpass−∆t−t0、距离D′′=(v0+a∆t)(tpass−∆t−t0);全程距离关系满足D=D′+D′′.
考虑到实际城市道路环境及安全要求,为保证在合理范围内的加速度最小,将tpass的值选为红绿灯切换时刻的临界值.下面根据车辆行驶情况按加速、减速及匀速三种情况分别进行详细讨论:
1)如果D<v0(tpass−t0),则车辆可维持当前速度安全通过绿灯,无须额外的加减速变换.
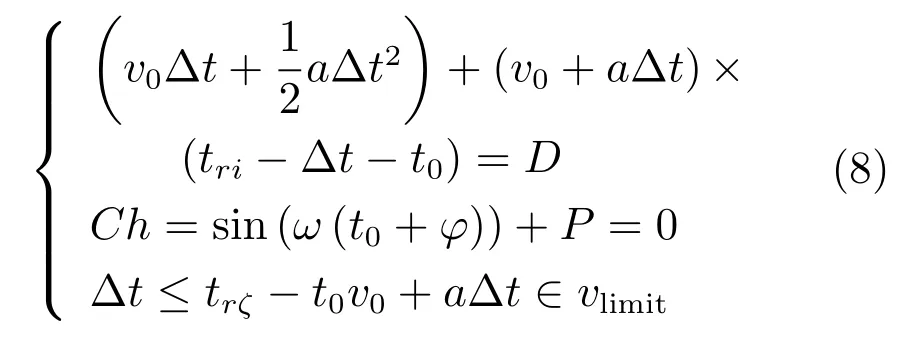
2)如果按照上述分析,车辆需加速一段距离后才能通过信号灯路,即a>0,则选取第ζ个循环红灯开始的时刻作为车辆通过信号灯的临界节点,即tpass=trζ,以此来确保在加速过程中的加速度最小,将该过程转化为数学表达式如下:
3)如果车辆需减速通过信号灯路,即a<0,则选取tpass=tgζ来确保减速度最小,且符合如下规则:
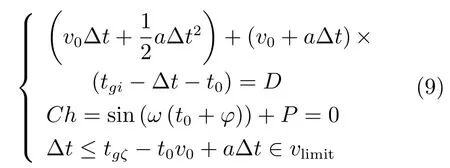
在情况 2)的第一项方程中v0∆t+a∆t2代表车辆以初始速度v0进入信号灯预测范围后,以加速度a匀加速驾驶∆t时间后的路程;(v0+a∆t)(tri−∆t−t0)代表车辆经过加速运动后,在剩余路程中,以v0+a∆t的速度匀速驾驶(tri−∆t−t0)时间的路程,为了确保加速度最小,选取通过该段信号灯的驾驶时间tpass=tgζ;方程Ch是信号灯判据,ω、ϕ、P是构成信号灯周期的正弦函数参数;第三项方程表示加速时间∆t不应超过全程驾驶时间trζ−t0;第四项方程则对速度进行限制,vlimit为本文设定的安全速度限制范围.情况3)表示车辆减速通过信号灯的表达式,分析过程同上,在第三项方程中,选取tgζ−t0作为全程驾驶时间,这样可以确保减速度的最小.考虑油耗与加速度的关系,本文选取加速度值最小点来求取目标速度vtarget.
注1.为了确保加速度与行车时间的平衡,本文考虑车辆以匀速、加速、减速通过信号灯路口的三种不同情况,选取红绿灯变换的节点时刻作为tpass的值.相较于文献[26]中以信号灯状态作为节点,本文的方法更为简明直观,且可保证每种情况下的加速度变化最小.本文采用正弦函数描述信号灯变化周期,与文献[12]的集合形式相比,不仅减少了计算量,表现形式也更为清晰新颖.
2.2 基于油耗优化的车速控制
2.2.1 性能指标
本文采用MPC实现车辆油耗优化控制.MPC方法是一种特殊的优化控制方法,采用MPC控制方法时,控制器不仅利用当前和过去的偏差值,还引入预测模型来预测未来的偏差值,并通过滚动优化过程迭代地计算最优控制输入,从而使未来一段时间内的被控量与其期望值的偏差最小.
MPC方法中,车辆方程可表达成如下形式:

其中,Am、Bm是相应的离散系统矩阵,Am=eAeh,采样周期取为h=0.2.
状态方程(10)作为本文MPC控制器预测模型,设定NP为预测步数,也就是最优化窗口的长度.为此,将性能指标(7)重新写为如下形式:
其中,vtarget(j)是由式(8)和(9)得到的车辆参考速度,qk、rk和w为加权系数.
注2.本文采用MPC方法求解最优速度序列时,在速度约束部分采用了实时变化的设定速度而非固定的参考速度,且性能指标中间接考虑了信号灯状态与车辆行驶速度的关联,这一性能指标非常符合车辆–信号灯协同控制的实际需要.
2.2.2 预测模型重构
由于本文设计的控制输入u与加速度a大小有关,为确保车辆行驶的平稳性,加速度变化应尽可能小.因此,我们采用增量式控制策略.为此,引入状态和控制量的差值表达式:∆x(k+1)=x(k+1)−x(k),∆u(k)=u(k)−u(k−1)
2.2.3 基于Laguerre函数的控制输入计算
结合性能指标及状态方程不难看出,状态方程(12)的预测输出(k+m|k)即为性能指标(11)的速度v(j),可见,求解最优控制输入使速度输出和设定值偏差最小,就可以解决使得预测输出(k+m|k)趋近设定值vtarget的问题.对于该优化问题的求解,本文采用Laguerre函数逼近方法.
首先将控制输入序列表示为∆U=则可将任意预测输入用脉冲算子δ和∆U来表示,即有∆u(k+m)=∆U,这里m表示时间序列 (m=0,1,···,NC−1).如果将∆U看作系数向量,很显然脉冲算子就用来获取控制轨迹,因而 ∆u(k+m)可近似表示为离散多项式函数,本文用如下离散Laguerre函数来逼近:lN(m)=其中,d=e−λ,λ为时间比例因数.定义向量:则有如下差分关系式:

由文献[27]可知,L2(R+)内的任意函数均可描述为基于Laguerre函数的正交展开形式.设离散变量的脉冲响应为H(m),则它可描述为Laguerre函数的N级正交展开形式:

其中,系数ci满足如下关系:
用Laguerre函数近似离散系统的脉冲响应的求解过程如下:首先,生成系统(10)的脉冲响应H′(m);然后,根据式(15)和H′(m)确定参数序列ci;再根据式(14)得到基于Laguerre函数的脉冲响应H(m),通过调节参数λ的值,使H(m)逼近脉冲响应曲线H′(m).
根据上述思想,时刻k的控制输入脉冲响应∆u(k+m)可表示为
或写为如下向量形式:

其中,η是N维列向量,
在之后的讨论中,用LT(m)η代替∆u(k+m),则求解最优控制输入∆u(k)就转化为求解序列η的问题.结合上一节的讨论,k时刻的未来状态(k+m)和输出(k+m|k)可表示如下:
由此可见,求取最优向量η即间接得到最优解∆u(k).
取φT(m)=,结合方程 (15)可将性能指标(16)整理为
为了得到最优解η,性能指标J最小化的必要条件为从而得到最优的η为
进而利用式(17)即得到最优控制输入序列∆U=从而完成MPC最优控制输入的求解.
3 仿真结果及分析
为了验证上述理论的正确性,本文选取如下参数进行仿真实验:信号灯的循环周期T=100s,其中60s为红灯(其中包括5s黄灯),40s为绿灯,正弦函数的角频率+π,采样长度为N=100,给定各参考系数如下:ρ=1m/s2,A=2.2m2,Cd=0.35,dm=5,m=1464kg,δ=0.1,cr=0.015,ud=1.5,ω=110.0,b0=0.1569,b1=0.0245,b2=−7.415×10−4,b3=5.975×10−5,c0=0.07224,c1=0.09681,c2=0.001075[23];本文对比实验选取经验驾驶Gipps模型[28].
设定车辆的初始速度v0=11.5m/s,速度范围为:vlimit∈[11.1m/s,22.2m/s],为了更好地接近实际情况,图2给出了车辆参考速度vtarget随着信号灯变化的曲线.在图2(a)中,车辆与依次4个信号灯的距离分别为D1=1300m、D2=2500m、D3=7000m、D4=9000m,仿真结果显示在距离D1中,当车辆判断不能匀速通过后,全程以0.03m/s2的加速度驾驶,在第二段距离D2中,车辆全程以0.226m/s2的加速度在当前信号灯周期内通过路口,在第三段距离D3中,车辆经过两个信号灯周期的时间长度,以0.016m/s2的减速度匀减速通过,在第四段距离D4中,车辆以0.0252m/s2的加速度在绿灯即将结束时通过.
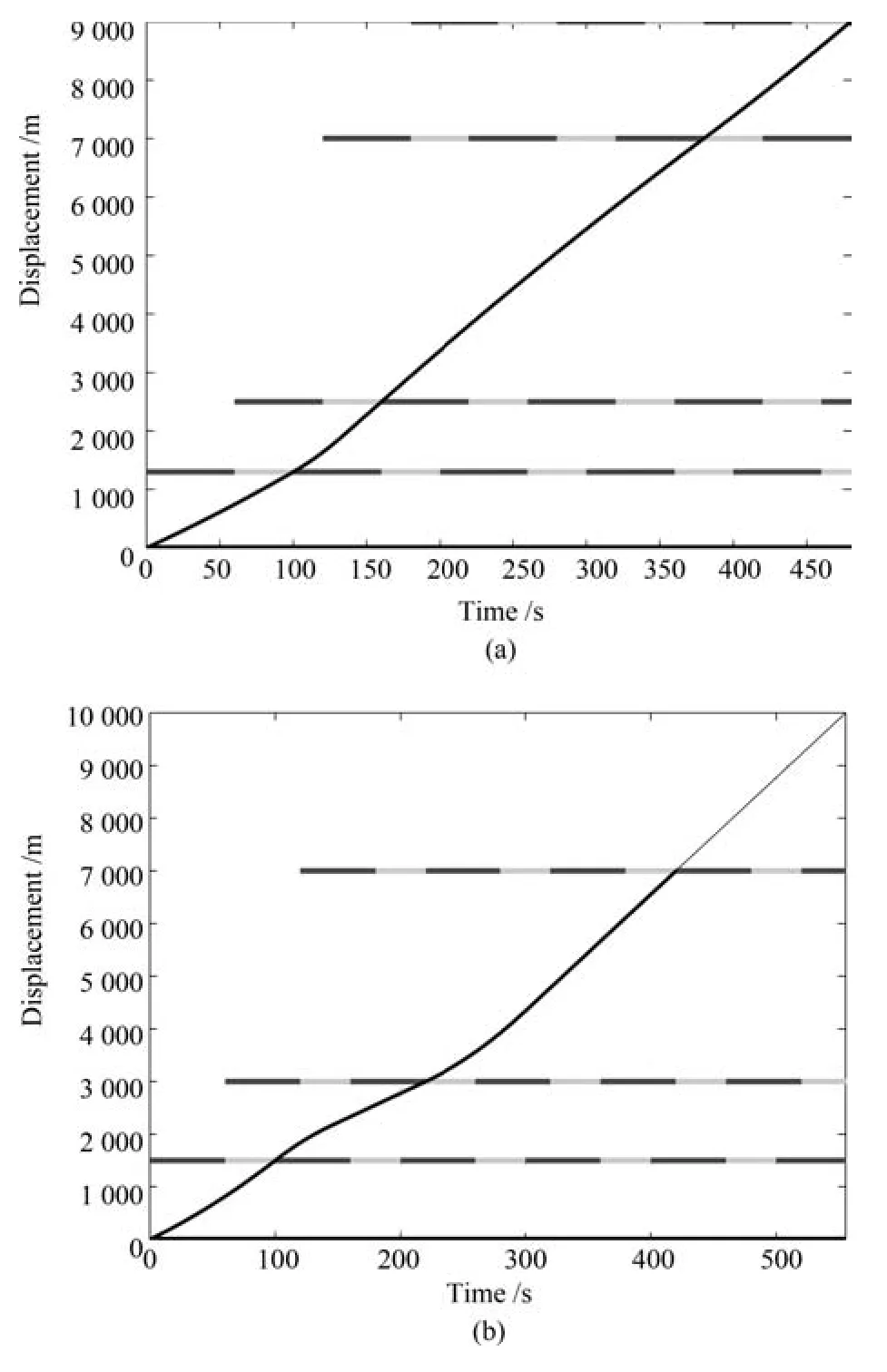
图2 基于信号灯信息的车辆驾驶距离曲线Fig.2 The vehicle driving distance curve with traffic light information
在图2(b)中车辆距4个信号灯分别为=1500m、=3000m、=7000m、=10000m,仿真结果显示在第一段距离中,车辆以加速度0.07m/s2通过信号灯,在第二段距离中,车辆先以0.164m/s2的减速度减速50s后匀速驾驶,在第三段距离中,车辆先以0.140m/s2加速75s后,维持该速度匀速通过信号灯,在距离中,车辆可以匀速通过第一个循环的绿灯,无需其他操作.图2很好地反映出车辆严格遵守文中的驾驶规则,避免了不必要的加减速以及急刹车操作.图3给出了上述两种情况下,运用MPC方法和传统Gipps模型分别对参考速度vtarget进行速度跟踪的曲线,从图3中可以看出,运用MPC方法的车辆可以很好地对参考速度进行跟踪,在每一时间段内,跟踪速度与参考速度都较为接近,尤其在通过每一信号灯路口的瞬时,速度波动较小,跟踪误差在合理范围之内,且在匀速阶段跟踪效果最为理想;而传统Gipps模型虽然也能较迅速地对参考速度进行跟踪,但其具有很大的时延性,当速度波动较大的时候,其不断累积跟踪误差,由图3(b)可以看出,从第130s时开始的匀速阶段,跟踪误差累积到最大值,跟踪效果并不理想.
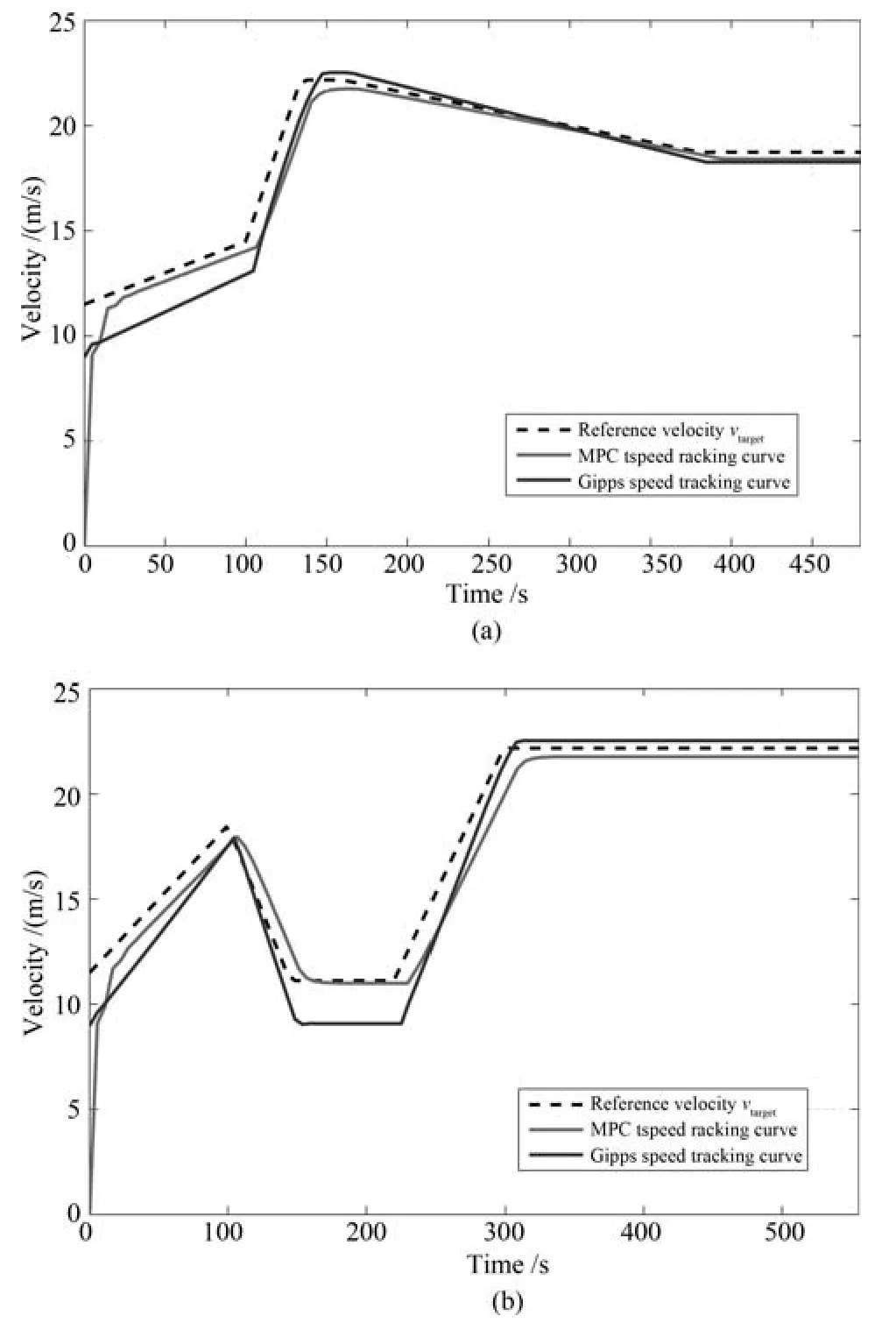
图3 速度跟踪曲线Fig.3 The speed tracking curve
图4给出了在两种情况下通过MPC方法得到的最优控制输入曲线,与图3中速度的加、减变化相对应.当控制输入在零值以上,车辆处于加速状态;否则,控制输入值应相应减小,车辆开始减速,在驾驶过程中,控制输入能够维持在一定的界限范围内,且控制输入整体波动比较平稳.
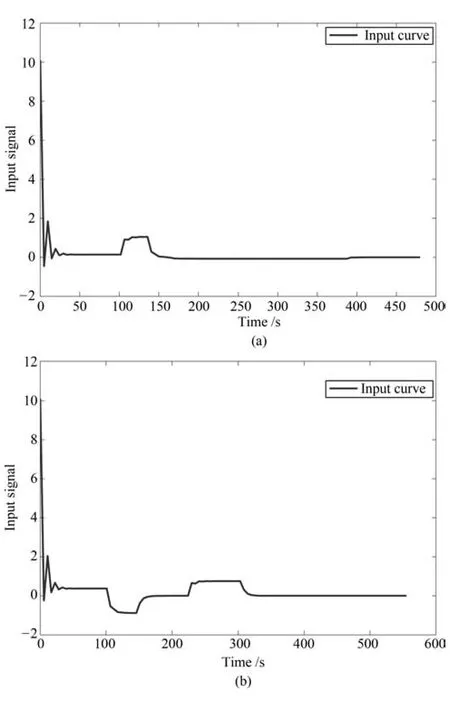
图4 MPC车辆输入曲线Fig.4 The input curve of the MPC-vehicle
图5表示在MPC方法中,输入差值∆u的变化,输入差值越接近0,代表实际输入与限制范围的偏差越小,也就是加速度的变化越小,系统状态越稳定.实验表明,输入∆u在零值附近稳定波动,在加速过程中会产生小幅震荡,但最终都稳定趋于0,运用MPC方法,具有良好的稳定性,由于速度的波动较小,为乘客和驾驶员提供了舒适性,速度的合理控制,在一定程度上增加了交通的安全性.
图6给出了两种情况下,运用MPC方法驾驶一段时间后的油耗曲线,并且与传统Gipps跟踪速度方法进行对比,对比实验显示,虽然在速度跟踪性能上,Gipps方法也能很好地对目标速度进行跟踪,但是采用传统Gipps方法对车辆进行控制时,其瞬时加速度较大,油耗量也明显增加,不能很好地降低油耗,产生了不必要的燃油浪费以及空气污染;而MPC方法在每一个信号灯路段耗油量都有所降低,尤其当速度变化频繁的时候,油耗量明显低于采用Gipps控制的车辆,而随着驾驶距离的增加,累计油耗节约量也显著提高.由此可以看出,本文提出的基于MPC的车辆环保驾驶方法,不仅能很好地根据信号灯信息进行速度跟踪,而且能够明显降低车辆油耗,更加适合于城市交通环境中的自动驾驶技术.
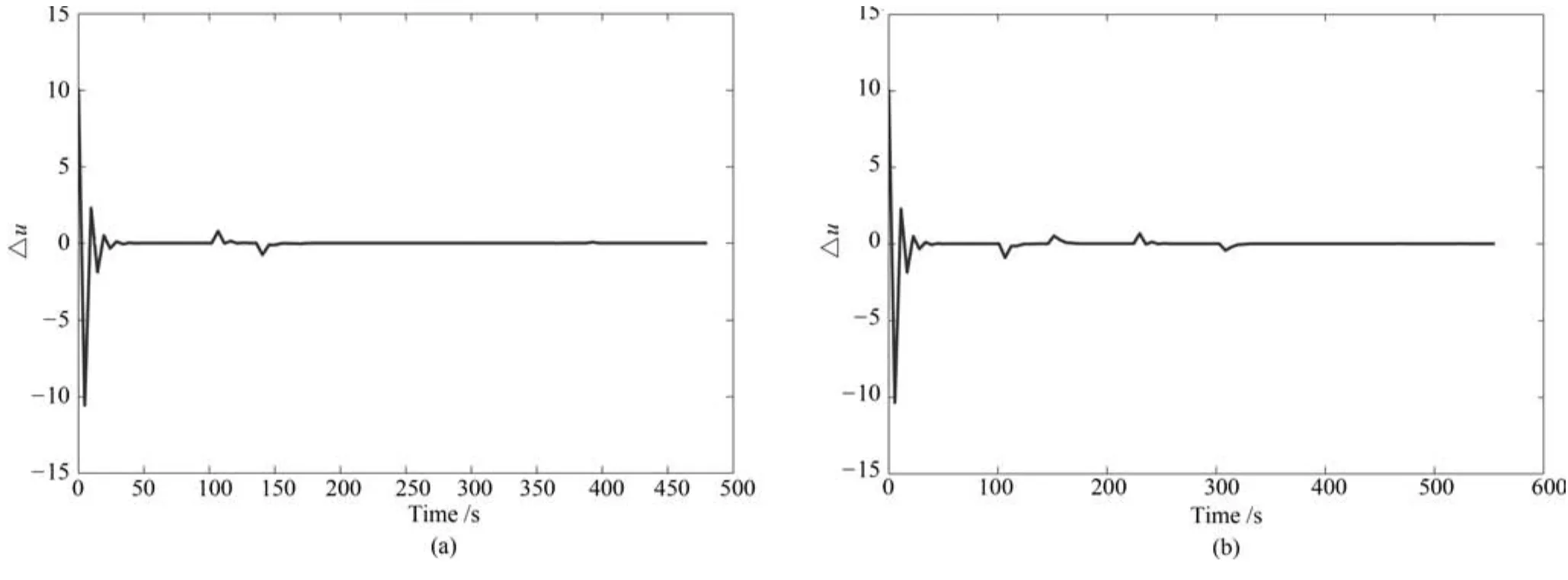
图5 MPC车辆输入差值曲线Fig.5 The input difference curve of the MPC-vehicle

图6 车辆油耗曲线Fig.6 The input curve of the MPC-vehicle
4 结论
标,采用模型预测控制方法得到可保证行驶安全的油耗最优控制策略.仿真实验表明,采用本文的方法后,车辆可实现免停车通过前方信号灯,且明显比传统的控制方法更为省油.由于对参考速度进行实时规划,所以本文的驾驶策略更适合城市交通应用.不过,本文并未考虑存在前方车辆的情况,如何考虑前方车辆进行车辆跟踪及信号灯控制协同设计,这一问题值得进一步研究.
本文提出一种基于信号灯信息预测和模型预测控制来降低城市交通中车辆油耗的环保驾驶策略.车辆通过通信网络获取当前信号灯状态及其周期,且根据安全和节油规则,对车辆不停车通过信号灯的最佳速度进行规划.然后结合油耗和控制性能指
1 Zhao Na,Yuan Jia-Bin,Xu Han.Survey on intelligent transportation system.Computer Science,2014,41(11):7−11(赵娜,袁家斌,徐晗.智能交通系统综述.计算机科学,2014,41(11):7−11)
2 Yang Kai.China′s automobile market review of 2014 and sales prediction in 2015.Auto Industry Research,2014,(4):4−11(杨凯.2014中国汽车市场回顾及2015销量预测.汽车工业研究,2014,(4):4−11)
3 Mukhtar A,Xia L K,Tangt B.Vehicle detection techniques for collision avoidance systems:a review.IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2318−2338
4 Xiao L Y,Gao F.A comprehensive review of the development of adaptive cruise control systems.Vehicle System Dynamics,2010,48(10):1167−1192
5 Dey K C,Yan L,Wangx J,Wang Y,Shenh Y,Chowdhury M,Yu L,Qiu Cx,Soundararaj V.A review of communication,driver characteristics,and controls aspects of cooperative adaptive cruise control(CACC).IEEE Transactions on Intelligent Transportation Systems,2016,17(2):491−509
6 Nkoro A B,Vershinin Y A.Current and future trends in applications of Intelligent Transport Systems on cars and infrastructure.In:Proceedings of IEEE 17th International Conference on Intelligent Transportation Systems.Qingdao,China:IEEE,2014.514−519
7 Butakov V A,Ioannou P.Personalized driver assistance for signalized intersections using V2I communication.IEEE Transactions on Intelligent Transportation Systems,2016,17(7):1910−1919
8 Kamal M A S,Mukai M,Murata J,Kawabet.Development of ecological driving system using model predictive control.In:Proceedings of the 2009 ICCAS-SICE.Fukuoka:IEEE,2009.3549−3554
9 Kamal M A S,Mukai M,Murata J,Kawabet.Ecological vehicle control on roads with up-down slopes.IEEE Transactions on Intelligent Transportation Systems,2011,12(3):783−794
10 Ichiharat,Kumano S,Yamaguchi D,Sato Y,Suda Y.Driver assistance system for eco-driving.In:Proceedings of 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services.Stockholm,Sweden:ITS,2009.
11 Yangx Y,Li D,Zheng P J.Effects of eco-driving on driving performance.Applied Mechanics&Materials,2012,178−181:2859−2862
12 Asadi B,Vahidi A.Predictive cruise control:utilizing upcoming traffic signal information for improving fuel economy and reducing trip time.IEEE Transactions on Control Systems Technology,2011,19(3):707−714
13 Cheng Q,Nouveli´ere L,Or fi la O.A new eco-driving assistance system for a light vehicle:energy management and speed optimization.In:Proceedings of the 2013 IEEE Intelligent Vehicles Symposium(IV).Gold Coast,Australia:IEEE,2013.1434−1439
14 Sungt W,Shiu L C,Lin Ft,Yang C S.A speed control scheme of eco-driving at road intersections.In:Proceedings of the 3rd International Conference on Robot,Vision and Signal Processing.Kaohsiung,Taiwan,China:IEEE,2015.51−54
15 Xiang Xh,Zhou K,Zhang W B,Qin Wh,Mao Q Z.A closed-loop speed advisory model with Driver′s behavior adaptability for eco-driving.IEEE Transactions on Intelligent Transportation Systems,2015,16(6):3313−3324
16 Kamal M A S,Mukai M,Murata J,Kawabet.Ecological driver assistance system using model-based anticipation of vehicle-road-traffic information.IET Intelligent Transport Systems,2010,4(4):244−251
17 Kamal M A S,Mukai M,Murata J,Kawabet.Model predictive control of vehicles on urban roads for improved fuel economy.IEEE Transactions on Control Systems Technology,2013,21(3):831−841
18 Kamal M A S,Mukai M,Murata J,Kawabet.Ecological driving based on preceding vehicle prediction using MPC.IFAC Proceedings Volumes,2011,44(1):3843−3848
19 Azpilicueta L,Vargas-Rosales C,Falcone F.Intelligent vehicle communication:deterministic propagation prediction in transportation systems.IEEE Vehicular Technology Magazine,2016,11(3):29−37
20 Nguyen V,Kim Ott,Dangt N,Moon S I,Hong C S.An efficient and reliable green light optimal speed advisory system for autonomous cars.In:Proceedings of the 18th Asia-Paci fi c Network Operations and Management Symposium(APNOMS).Kanazawa:IEEE,2016.1−4
21 Zhengx Z,Zhang L G,Kholodov Y.Model predictive control of eco-driving for transit using V2I communication.In:Proceedings of the 34th Chinese Control Conference(CCC).Hangzhou,China:IEEE,2015.2511−2516
22 Guant Y,Frey C W.Predictive fuel efficiency optimization using traffic light timings and fuel consumption model.In:Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems(ITSC).The Hague,The Netherlands:IEEE,2013.1553−1558
23 Wang Q,Guo G,Cai B B.Distributed receding horizon control for fuel-efficient and safe vehicle platooning.Science China Technological Sciences,2016,59(12):1953−1962
24 Huang S,Ren W.Safety,comfort,and optimal tracking control in AHS applications.IEEE Control Systems,1998,18(4):50−64
25 Seredynski M,Dorronsoro B,Khadraoui D.Comparison of green light optimal speed advisory approaches.In:Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems(ITSC).The Hague,The Netherlands:IEEE,2013.2187−2192
26 Mandava S,Boriboonsomsin K,Barth M.Arterial velocity planning based on traffic signal information under light traffic conditions.In:Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems.St.Louis,America:IEEE,2009.1−6
27 Wang L P.Model Predictive Control System Design and Implementation Using MATLAB®,London:Springer-Berlin,2009.1−148
28 Gipps P G.A behavioural car-following model for computer simulation.Transportation Research Part B:Methodological,1981,15(2):105−111
