雷达/红外/激光复合制导信息融合技术
2018-04-09李时光李婵刘峥
李时光 李婵 刘峥


摘 要: 多模复合制导武器在现代战争中的作用越来越重要。 以雷达/红外/激光三模复合导引头为应用背景, 设计了一种分布式、 特征级信息融合方案。 该方案重点研究了协同抗干扰和多特征融合识别等关键技术, 并在专用数字仿真测试平台中进行了性能验证。 结果表明, 该方案可有效提高导引头在复杂干扰背景下的抗干扰性能和目标鉴别能力。
关键词: 多模复合制导; 抗干扰; 目标鉴别; 测试平台
中图分类号: TJ765.3 文献标识码: A 文章编号: 1673-5048(2018)01-0033-06
0 引 言
在由毫米波雷达/红外成像/激光半主动探测器构成的三模复合导引头系统中, 雷达导引头作用距离远, 采集的目标位置信息(包括距离和角度等信息)全面, 可以全天时、 全天候工作, 但容易受到侦察干扰且测量精度较低; 红外导引头虽然只能测角或角速度, 但其测量精度高, 且红外图像可以刻画出目标的几何特征信息, 对于鉴别目标身份具有很大优势, 再加上其为被动观测, 所以具有较强的抗电子干扰能力[1]; 半主动激光导引头作用距离相对较远, 可测距、 测角且角分辨率高[2], 但其受天气影响较大, 且易受到烟幕干扰。 利用这三种探测器各自的优点进行组合探测与跟踪, 一方面可对所接收的三组关于目标的运动状态信息进行融合, 提高跟踪精度; 另一方面通过航迹关联与目标鉴别可以进行干扰判别, 从而提高复合制导系统的整体抗干扰性能和目标鉴别性能[3]。
本文针对毫米波雷达/红外成像/激光半主动三模复合导引头, 给出了复合导引头信息融合处理总体技术方案和关键技术说明, 可为毫米波雷达/红外成像/激光半主动复合导引头的工程化应用提供理论技术参考。
1 总体方案设计
1.1 复合导引头的结构
多模复合導引头在结构复合方式上主要有分口径和共口径两种方式, 共口径相对于分口径在结构上具有体积小、 质量轻等优势, 同时还可以实现多个传感器数据的精确配准, 为复合信息处理减小误差[4]。 在本方案中, 毫米波雷达/红外成像/激光半主动三模导引头的集能器采用共口径结构复合方式, 对观测场景的搜索与目标跟踪均在同一个伺服控制平台上完成。
1.2 复合导引头信息融合方案
针对前述共口径结构复合导引头, 本文给出了分布式、 特征级信息融合方案, 见图1。
分布式融合是对目标位置信息的融合处理, 其过程是由各探测器完成单探测器的多目标跟踪与状态估计, 把获得的目标航迹信息送入融合中心。 融合中心完成时间对准、 坐标变换, 然后基于这些探测器的目标状态估计进行航迹关联处理, 最后对来自同一目标的航迹估计进行航迹融合。 与集中式融合处理方式相比, 分布式融合的优点是可以以较低的费用获得较高的可靠性和可用性[5]。
特征级融合是对目标属性信息的融合处理, 以实现目标身份的确认。 按照所处理对象的数据类型不同, 目标属性融合分为数据级融合、 特征级融合和决策级融合。 其中特征级融合和决策级融合可以进行异类探测器间的信息融合。 本方案采用特征级融合, 与数据级融合相比, 其实现了信息压缩, 有利于实时处理; 与决策级融合相比, 则多保留了目标的信息, 减少了信息损失[6]。
由图1可知, 分布式、 特征级信息融合方案中, 信息融合处理单元包括两个部分: 局部探测器目标跟踪滤波处理和信息融合中心处理。 与常规分布式结构相比, 不同之处是将局部探测器目标跟踪移至信息融合处理单元进行处理, 这样调整可以使整个信息融合处理单元掌握更多的目标状态信息, 使处理更加灵活。
雷达、 红外、 激光前端首先完成目标检测、 参数估计等步骤, 形成各自目标的状态观测信息(目标点迹)。 然后, 局部跟踪器再分别对各自前端探测的目标点迹进行滤波估计, 产生稳定的目标跟踪局部航迹信息。
信息融合中心处理的对象为局部航迹和各航迹所携带的目标属性特征信息。 具体工作步骤为时空配准、 航迹关联、 特征融合和航迹融合。 其中, 多探测器数据层协同抗干扰功能在航迹关联环节实现, 多特征融合识别在特征融合环节实现。
2 协同抗干扰技术
多模复合导引头在复杂干扰背景下工作时, 需要采取合适的信息融合策略, 以确定采用何种航迹信息对最终输出的系统航迹进行更新, 进而引导导弹飞行。 本方案中, 航迹信息包括雷达航迹、 红外航迹、 激光航迹以及系统航迹。
复合导引头的三个探测器在完成制导任务过程中工作状态分为正常和故障(受干扰)两种状态。 在“航迹关联”环节中, 当某一探测器航迹不能与其他探测器航迹关联成功时, 可以判断该探测器受到干扰。
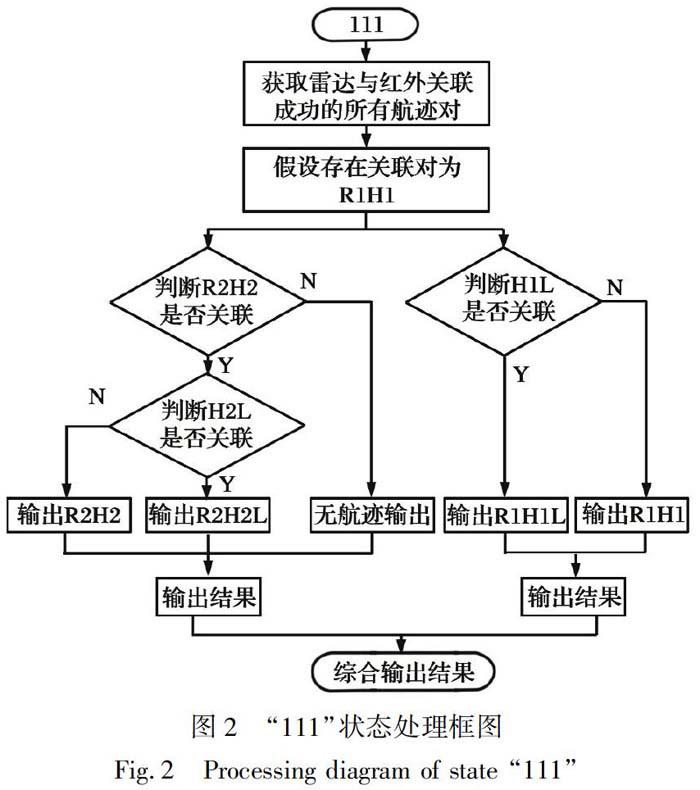
本方案假设雷达探测器输出2条航迹(R1和R2), 红外探测器输出2条航迹(H1和H2), 激光探测器输出1条航迹(L)。 分别将每个探测器的航迹与其他两个探测器的航迹进行两两关联, 得到8组关联对, 将其分为三组, 然后判断每组是否有关联成功的关联对, 若有则输出“1”, 没有则输出“0”。 这样就可以得到8种状态, 分别用“000”、 “001”、 “010”、 “100”、 “011”、 “101”、 “110”和“111”表示。 每种状态下, 航迹关联的输出结果如下:
(1) 111: 表示雷达与红外、 红外与激光、 激光与雷达之间均有关联对, 其处理流程如图2所示。
(2) 110/101/011: 以“110”为例, 表示雷达与激光之间不存在关联对, 雷达与红外之间、 红外与激光之间均存在关联对。 此时红外与另外两种探测器均存在关联对, 航迹关联环节输出红外航迹, 进而利用特征融合进行目标判别, 最终输出红外的库内目标航迹。 “101”和“011”的情况与“110”类似。
(3) 010/001/100: 以“010”为例, 表示仅有红外与激光的航迹之间存在关联对, 雷达航迹与红外航迹、 激光航迹均不关联, 因此判定雷达受到了干扰。 “航迹关联”环节输出红外与激光之间的关联对。 “001”和“100”的情况与“010”类似。
(4) 000: 该状态出现时, 表示三个探测器输出的航迹互相均不两两相关联, 航迹关联环节不再向后续环节输出用于航迹融合进而更新系统航迹的航迹信息, 系统航迹采用外推进行自我更新。
多探测器数据层协同抗干扰技术是本方案信息融合策略的核心, 该技术在航迹关联环节实现, 在一定程度上体现了复合体制优异的抗干扰性能。
3 多特征融合识别
特征级融合属于属性融合, 其一般流程如图3所示。
在整个信息融合系统结构中, 特征级融合发生在航迹关联之后、 航迹融合之前。 航迹关联的结果是产生一个或多个关联航迹组, 每组关联航迹即代表一个观测目标。 特征级融合就是将多个观测目标中的多探测器异类特征加以融合, 利用融合后的多特征信息与模型库中待攻击目标的相应特征向量进行匹配, 根据匹配率的高低来判断是否为模板库中的待攻击目标。
导引头对目标进行探测时主要面对三方面的干扰, 分别是强杂波、 假目标与有源干扰。 目标鉴别需要解决的问题是如何在复杂背景下区分待攻击目标与假目标。 实际应用中, 该问题可以归纳为对典型待攻击目标与假目标的二元分类问题, 与待攻击目标间的分类不同, 这种鉴别所需的特征是待攻击目标间的共性特征以及待攻击目标与假目标之间的差异特征。
特征融合目标鉴别方案分为训练阶段和鉴别阶段。 在训练阶段, 分别提取雷达与红外探测器目标训练样本的特征(本方案中,激光探测器不包含特征信息, 因此仅对雷达与红外探测器的特征信息进行融合), 利用实测数据分析各个特征的可分性, 进行有效的特征选择。 本方案选择的红外特征包括像素数、 宽高比、 目标复杂度等; 雷达特征包括长度、 波形熵、 中心距等。 在此基础上, 利用基于OWA算子的特征融合算法[7]对雷达与红外特征进行融合, 得到训练样本的融合特征向量, 进而利用支持向量域描述(Support Vector Data Description, SVDD)模型[8]作为目标鉴别器模型进行训练并生成多传感器融合的目标训练模板库[9]。 训练阶段的处理流程如图4所示。
在鉴别阶段, 对传感器收到的目标雷达特征与红外特征进行基于OWA算子的特征融合, 并利用SVDD模型对所得的融合特征向量进行判别, 以判别该目标是否为库内目标。 鉴别阶段的处理流程如图5所示。
雷达/红外复合制导系统为目标识别提供了比单探测器更多的有關目标的特征信息, 增大了特征空间维数。 本方案对来自雷达探测器和红外探测器的异类信息进行特征级融合, 能有效区分库内目标与库外目标, 提高了正确鉴别待攻击目标的概率。
4 信息融合仿真测试平台构建
为了验证复合导引头信息融合处理方案的正确性, 结合现有的硬件条件, 本文基于计算机建模仿真技术搭建了一套多模复合导引头信息融合仿真测试平台。
4.1 平台组成与功能
测试平台由仿真计算机、 仿真接口插件组成, 被测件为复合导引头信号与信息处理器, 如图6所示。 其中信号与信息处理器硬件平台与仿真接口板之间用RS422接口连接, 再通过PCI总线接口连接到仿真计算机。
测试平台满足以下测试需求:
(1) 模拟产生信息融合处理单元所需要的雷达、 红外和激光导引头前端测量的数据, 包括目标的位置点迹信息、 目标特征信息和对各传感器施加一些常见干扰后的数据信息;
(2) 将模拟的仿真数据按照一定的数据格式以一定的数据率, 通过连接仿真计算机的仿真接口板实时送入信息融合处理单元;
(3) 导引头信号与信息处理器通过相关接口, 将信息融合处理结果实时传送至仿真计算机, 通过在计算机上构造的用户操作界面来实时显示信息融合系统的处理结果并进行性能评估。
针对以上设计需求, 设计了信息融合仿真测试软件界面, 如图7所示。
测试软件主界面分为动画观测区、 测量结果显示区、 工作状态显示区、 工作模式显示区、 操作提示区以及控制面板区等6个区域, 其中前5个区域均用来直观演示或显示实时数据和状态, 可供用户观察测试过程现象。 控制面板区是主要操作的区域, 具体包含“系统自检”、 “参数设置”、 “开机指令”、 “系统复位”、 “航向角输出”、 “俯仰角输出”、 “运动轨迹”和“退出系统”等8个按钮, 主要提供三大功能:
(1) 控制系统的状态, 包括自检、 开机、 复位和退出等。
(2) 设置仿真参数: “参数设置”按钮负责打开如图8所示的参数装订界面, 可以根据设计好的攻击场景模拟生成复合导引头的观测数据。 参数设置界面中包括5个区域: 导引头工作模式设置、 目标参数设置、 干扰设置、 导弹参数设置和环境参数设置。
(3) 显示处理结果: 显示信息融合系统对目标航向角和俯仰角的融合结果以及导弹和目标的运动轨迹, 并对系统的性能做出评估。
4.2 仿真测试及分析
设置两个目标, 假定目标1为待攻击目标, 目标2为假目标; 仿真开始时刻弹目距离为2.8 km; 仿真步长为5 ms; 当弹目距离为1 km时, 雷达质心式箔条干扰出现。 本次仿真的航向角融合结果见图9。
由图可知, T时刻之前, 雷达、 红外和激光探测器均未受到干扰, 航迹关联控制字为“111”, 航迹关联的输出结果为两组关联对, 分别代表目标1和目标2。 融合系统进入特征融合阶段, 将这2个观测目标的雷达和红外特征加以融合, 利用融合后的多特征信息与模型库中待攻击目标的相应特征向量进行匹配, 根据匹配率的高低判断出目标1是库内目标, 目标2是库外目标, 因此融合系统将目标1的融合结果作为系统航迹。
T时刻时, 雷达箔条干扰出现, 雷达目标1的航迹逐渐偏离红外、 激光目标1的航迹。 如前文所述, 此时的航迹关联情况为“110”(雷达目标2与红外目标2关联成功、 红外目标1与激光目标关联成功, 雷达目标与激光目标关联失败), 根据融合策略, 航迹关联环节输出2个红外目标的航迹, 进而通过后续的特征融合环节对这2个红外目标进行鉴别, 鉴别出目标1为库内目标, 目标2为库外目标, 因此融合系统将以红外目标1的航迹来更新系统航迹。
从仿真测试可以看出, 本方案利用航迹关联协同抗干擾和特征级融合两大关键技术, 起到了抗干扰和正确鉴别目标的作用。
5 结 论
本文针对毫米波雷达/红外成像/半主动激光三模复合导引头, 给出了一种分布式、 特征级信息融合方案, 该方案采用了多探测器数据层协同抗干扰和特征级信息融合两大关键技术。 通过自行设计构建的专用数字仿真测试平台验证, 表明该方案能有效提高导引头的抗干扰性能和对目标的鉴别性能, 可为复合导引头的工程化应用提供技术参考。
参考文献:
[1] 吴爽. 红外成像导引头信号处理算法研究[D]. 西安: 西安电子科技大学, 2011: 1-3.
Wu Shuang. Study on Algorithms of Signal Processing Involved in Infrared Image Seeker[D]. Xian: Xidian University, 2011: 1-3.(in Chinese)
[2] 王狂飙. 激光制导武器的现状、 关键技术与发展[J]. 红外与激光工程, 2007, 36(5): 651-653.
Wang Kuangbiao. Statusquo, Key Technology and Deve-lopment of Laser Guided Weapon[J]. Infrared and Laser Engineering, 2007, 36(5): 651-653.(in Chinese)
[3] 艾薇, 刘峥. 雷达/红外复合导引头信息融合技术研究 [J].航空兵器, 2007(4): 30-31.
Ai Wei, Liu Zheng. The Survey of Radar/IR Seeker Information Fusion Technique[J]. Areo Weaponry, 2007(4): 30-31. (in Chinese)
[4] 左保军, 况耀武. 红外/激光双模导引头的光学系统[J]. 红外与激光工程, 2009, 38(3): 496-498.
Zuo Baojun, Kuang Yaowu. Optical Design of the IR/Laser Dual-Mode Seeker[J]. Infrared and Laser Engineering, 2009, 38(3): 496-498. (in Chinese)
[5] 李辉, 程琤, 张安, 等. 基于反馈结构的多传感器自适应航迹融合算法[J]. 计算机学报, 2006, 29(12): 2232-2237.
Li Hui, Cheng Zheng, Zhang An, et al. Adaptive Algorithm for Multisensor Track Fusion with Feedback Architecture[J]. Chinese Journal of Computers, 2006,29(12): 2232-2237. ( in Chinese).
[6] 韩崇昭, 朱红艳, 段战胜, 等. 多源信息融合[M]. 2版. 北京: 清华大学出版社, 2012: 7-10.
Han Chongzhao, Zhu Hongyan, Duan Zhansheng, et al. Multi-Source Information Fusion[M]. 2nd ed. Beijing: Tsinghua University Press, 2012: 7-10.( in Chinese)
[7] Yager R R. On Ordered Weighted Averaging Aggregation Operators in Multicriteria Decision Making[J]. IEEE Transactions on Systems, Man and Cybernetics, 1998, 18(1): 183-190.
[8] 刘艳红, 薛安荣, 史习云. K-means聚类与SVDD结合的新的分类算法[J].计算机应用研究, 2010, 27(3): 883-886.
Liu Yanhong, Xue Anrong, Shi Xiyun. New Classification Algorithm K-Means Clustering Combined with SVDD [J].Application Research of Computers, 2010, 27(3): 883-886. (in Chinese)
[9] 李龙, 刘峥. 基于训练特征空间分布的雷达地面目标鉴别器设计[J].电子与信息学报, 2016, 38(4): 950-957.
Li Long, Liu Zheng. Identifier for Radar Ground Target Based on Distribution of Space of Training Features[J]. Journal of Electronics & Information Technology, 2016, 38(4): 950-957. (in Chinese)
