基于特征融合和L-M算法的车辆重识别方法
2018-04-08王盼盼李玉惠
王盼盼,李玉惠
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.昆明理工大学 信息工程与自动化综合实验室, 云南 昆明 650500)
车辆重识别技术旨在从不同的拍摄场景中识别出相同的车辆,是智能视频监控研究领域的重要分支,近年来, 监控视频中车辆重识别问题引起了广大科研人员的兴趣并对其进行了相应的研究。监控视频中摄像头拍摄时存在着光照变化、视角变化以及摄像机自身属性的问题,导致同一目标的车辆图像的角度、颜色和轮廓等特征差别较大, 使得车辆重识别问题遇到了很大的挑战。为了解决这些问题,研究者们提出了许多方法,大致可分为目标特征的匹配法和机器学习的方法。
目标特征匹配方法的主要目的是提取对不同车辆具有区分性和对视角、光照具有鲁棒性的描述特征,利用这些提取的特征来直接或间接度量车辆图像之间的相似度。文献[1]将HSV颜色直方图、RGB颜色直方图和图像块LBP特征进行组合,并使用PCA降维得到最后的特征描述子。文献[2]将图像进行水平分块,随后提取每个小块的HSV、RGB、YCbCr颜色直方图和Schinidt、Gabor纹理特征进行识别。文献[3]提出了一种同一摄像机下已有图像与示例图像之间的图像边缘特征向量,然后用不同摄像机下相同车辆与不同车辆的特征向量来建立分类器。文献[4]将重识别问题转化为计算目标图像和候选图像之间的距离度量问题。文献[5]利用相同与不同车辆图像子区域的位置信息,边缘差异等特征来训练分类器。文献[6]利用二维Gabor小波提取空间局部特性。目标特征匹配法的优点是方法原理比较简单,但其缺点也显而易见,对光照、视角的变化所带来的图像特征的变化没有很好的鲁棒性。
机器学习的方法用于车辆的重识别的一个重要分支是深度学习,其基本思想是:训练一种多层的神经网络来解决由于光照、视角变化而引起的识别率低的问题。如Ahmed等[7]提出的深层卷积结构能够同时实现训练图片的特征的提取和相应的相似性测度函数学习。文献[8]使用简单的颜色直方图特征,利用目标图像对训练相对距离比较模型,该模型可以使真正匹配对间的距离小于误匹配对间的距离,从而具有较高的匹配率。基于深度学习车辆重识别虽然不需要人工提取车辆的特征,但需要大量车辆图片信息用于神经网络模型的训练,且运算量大,训练时间长。文献[9]用支持向量机学习中层语义属性的判断,并确定各属性的权重,形成以属性为中心,基于部分特征的再识别模型。但由于该方法训练时需要手动标记属性,且属性分类较多,训练的复杂度较大,在只有少量样本时又存在过拟合问题。
本文所提出的方法针对车辆重识别时不同摄像机中同一车辆的图像差异较大,单一特征难以稳定地描述图像的问题,采用多种特征融合实现车辆特征的提取,该方法将车辆图片的HSV特征和LBP特征进行融合,并对融合特征矩阵进行奇异值分解,提取特征值。针对传统BP算法收敛速度慢,精度不高的问题,采用L-M自适应调整算法优化BP神经网络。进而对不同光照,不同视角的同一车辆图片进行识别。
1 特征融合和BP算法
1.1 特征融合
由于车辆的颜色和几何特征包含了车辆本身的一些个性化信息,所以本文提取的图片特征为车辆的HSV和LBP特征,并将两种类型的特征进行串联,从而得到融合特征。并对融合特征矩阵进行奇异值分解,提取特征值。
车辆的HSV特征即为车辆的一种颜色空间模型,该模型对目标颜色的表达接近人类眼睛的视觉感知特性。它根据色彩的3个基本属性(色调、饱和度和亮度)来表达颜色。由于不同品牌的车外形设计不尽相同,所以车辆的几何特征在一定程度上可以代表车辆的个性化信息。本文在车辆几何特征的描述上采用简单实用的LBP特征,LBP特征的提取过程是在图像的某个区域内,将中心像素点的像素值作为阈值,相邻像素点与其进行对比,比阈值大的标定为1,并生成8位二进制数,作为该区域中心像素点的LBP值。
考虑到车辆图片的特征维数对重识别率有很大影响,故本文采用SVD即奇异值分解来提取车辆图片分块矩阵特征信息。奇异值分解的实现过程可通过式(1)表示
A=U∑VT
(1)
A为n×m的矩阵,代表待分解的特征矩阵,U是一个n×n的方阵,U中的向量称为左奇异向量。∑是一个n×m矩阵,VT是一个n×n矩阵,V中的向量称为右奇异向量。等式(1)右边的3个矩阵相乘的结果为一个接近于A的矩阵,而这3个矩阵的面积之和要远小于矩阵A。这样,特征矩阵就可以通过SVD分解达到降维的目的。
1.2 BP算法的原理
在BP神经网络中,多层前馈是其典型特征,多层是指该网络由3部分组成,分别为输入层、隐含层和输出层。前馈是指信号正向传播所得的误差信号作为调整信号按先前的路线返回,根据预测误差反复修正权值和阀值,使得误差函数值达到最小。Robert Hecht Nielson证明了任意连续函数都可以由上述BP 神经网络有效的逼近。BP神经网络的优点是其具有自学习、自适应和优异的非线性映射能力[10-12]。其一般结构如图1所示。

图1 3层BP网络结构图
1.3 Levenberg-Marguardt 优化方法
考虑到传统BP神经网络采用的梯度下降法优化学习方法易陷入局部最优,本文采用Levenberg - Marguardt优化方法对传统BP神经网络进行优化,L-M算法是一种结合牛顿法和梯度下降法的非线性优化算法,该方法能提供非线性最小化(局部最小)的数值解,并能有效解决过参数化和冗余参数问题,避免代价函数陷入局部极小值,这些特性使得L-M算法在计算机视觉等领域得到广泛应用[13-15]。
本文利用L-M算法克服了线性搜索难以寻找下降方向的问题,为了解决这一问题该算法假设f(x)是非线性函数,并把问题转化为约束线性化最小二乘问题。即式(2)的信赖域模型。
(2)
其中,hk为信赖域半径。这个方程的解可由求解式(3)得到。
(A(xk)TA(xk)+λkI)z=-A(xk)Tf(xk)
(3)
(A(xk)TA(xk)+λkI)
(4)
比例系数λk为常数,I是单位矩阵。由于式(4)正定(适当调整λk),从而式(3)产生的方向Z是下降方向。从式(3)可看出:如果比例系数λk为零时,随着每一步成功迭代,则依次减小,当与误差目标较为接近时,可以看作与高斯-牛顿法相似;当λk的值很大的时L-M算法与梯度下降法相近。由于类似于二阶导数的信息被运用到L-M算法当中,所以在权值数较少的情况下L-M算法比梯度下降法具有更快的收敛速度,此外,L-M算法还具有迭代次数相对较少,识别准确率高的优点。
2 车辆重识别流程
本文所提出的车辆重识别方法的流程为:首先对车辆图片进行归一化处理,然后提取车辆图片的HSV特征和LBP特征,并采用串联的方式实现特征的融合,对融合的特征矩阵进行奇异值分解,并提取子矩阵特征值。最后采用Levenberg-Marguardt 自适应调整算法优化BP神经网络,对车辆库图像的特征进行训练,进而对不同光照,不同视角的同一车辆图片进行识别。具体步骤如图2所示。

图2 特征融合和L-M算法的车辆重识别流程图
3 实验结果
本文随机采集车辆照片作为车辆数据库进行车辆重识别实验。该图片库共有40组车辆图片,每组车辆图片由同一车辆的10 幅92×112 图像组成,共400张图像。拍摄车辆的角度以及光照条件均有一定的变化。车辆图片库部分图像如图3所示。

图3 车辆图片库中部分车辆图片
本文在构建BP神经网络时所取隐含神经元个数为110,输出的神经元个数为40,学习速率为0.005。选择车辆库中每辆车的n(n<10)幅图像用于训练,另外10-n幅图像用于测试,得到本文所使用的特征融合改进方法与传统BP神经网络梯度下降方法的识别率对比图,如图4所示。
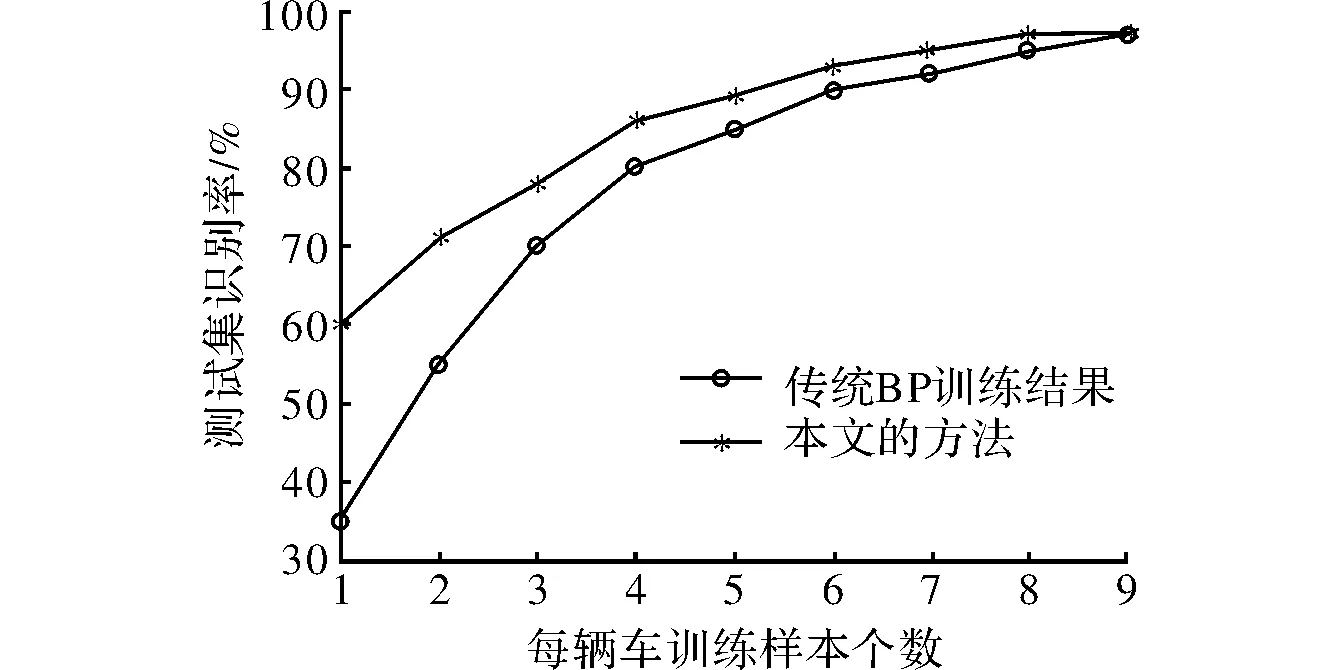
图4 训练样本数与识别率之间的关系
由图4可以看出,本文的方法比传统的BP算法在训练样本数相同的情况下具有更高的识别率。另外,从该图可以看出,随着训练样本数的增加,测试样本的识别率也相应的提高,最后趋于平稳,所以BP神经网络在训练模型时需要大量的样本才能有效提取目标的特征信息,即用于训练图像数量对测试集的识别率有很大的影响。
另外,影响测试集识别率的因素还有车辆图片的特征维数。实验证明当特征维数为48维时车辆的测试集识别率最高为97.5%。车辆图片特征维数与识别率之间的关系如图5所示。
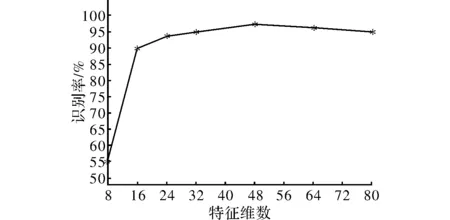
图5 特征维数与识别率之间的关系
4 结束语
本文针对车辆重识别时不同摄像机中同一车辆的图像差异较大,单一特征难以稳定地描述图像的问题,采用多种特征融合实现车辆特征的提取,然后对图像融合特征矩阵进行奇异值分解,并提取特征值。最后采用L-M自适应调整算法优化BP神经网络,进而对不同光照,不同视角的同一车辆图片进行重识别。由车辆重试别的验证实验结果可知,该方法在车辆的同一性识别方面具有较高的识别率,且对光照变化、视角变化都具有较好的鲁棒性。本文所提出的方法在视频监控中无牌照或者牌照遮挡的车辆的同一性检索方面具有一定的实用价值。
[1]Kostinger M, Hirzer M, Wohlhhart P, et al. Large scale metroc learning from equivalence constraints[C].Grace:IEEE Conference on Computer Vision and Pattern Recognition,IEEE,2012.
[2]Zheng W,Gong S,Xiang T. Re-identification by relave distance comparision[J].IEEE,2013,35(3):653-668.
[3]Shan Y,Sawhney H,Kumar R.Vehicle identification between non over-lapping cameras without direct feature matching[C].Hong Kong:IEEE International Conference on Computer Vision,2005.
[4]Zheng Weishi,Gong Shaogang,Xiang Tao.Re-identification by relative distance comparison[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,35(3):653-668.
[5]Friasvelazquez A,Ortiz C,Pizurica A,et al.Object identification by using or thonormal circus functions from the trace transform[C].France:IEEE International Conference on Image Processing,2012.
[6]Chai Zhenhua,Sun Zhenan, Mendez-Vazquez H,et al.Gabor ordinal measures for face recognition[J].IEEE Transactions on Information Forensics and Security,2014,9(1):14-26.
[7]Ahmed E,Jones M,Marks T K.An improved deep learning architecture for person re-identication[C].Boston:Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR),IEEE,2015.
[8]Heng W S,Gong S,Xiang T.Person reidentification by probabilistic relative distance comparison[C]. Providence:Proceedings of IEEE Conference on Computer Vision and Pauem Recognition,IEEE Press,2011.
[9]Layne R,Hospedales T M,Gong S.Person re-identification by attributes[C].Surrey:Proceedings of the British Machine Vision Conference,BMVA Press,2012.
[10] Robert Hecht-Nielsen.Theory of the back propagation neural network[C].Combridge:Proceedings of the International Joint Conference on Neural Networks,1989.
[11] 薛皓天.一种改进的BP神经网络在手写体识别上的应用[J].电子科技,2015,28(5):20-23.
[12] 白雪,田启川.基于神经网络的性别识别方法[J].电子科技,2013,26(9):151-154.
[13] 吴福朝.计算机视觉中的教学方法[M].北京:高等教育出版社,2008.
[14] 袁亚湘,孙文瑜.最优化理论与方法[M].北京:科学出版社,1997.
[15] Lwikipediaorg.Levenbers marquardt algorithm [EB/OL]. (2008-05-26)[2017-03-21]http://er.wikipedia.org/wiki/Levenberg Marquardt_algorithm.
