设置AMD的铁路钢桥鲁棒控制研究
2018-04-04刘嘉沈正松周长超
刘嘉,沈正松,周长超
(1. 武汉理工大学 道路桥梁与结构工程湖北省重点实验室,湖北 武汉 430070;2. 武汉理工大学 土木工程与建筑学院,湖北 武汉 430070;3. 青岛市市政工程管理处,山东 青岛 266000)
铁路钢桥是铁路客运交通中的重要设施,其对当前愈加严峻的客流运输形势起着至关重要的缓解作用。然而,在大轴重及高速度的列车荷载作用下,铁路钢桥的振动与疲劳寿命问题日益突出,并因此影响到了其安全性和耐久性。因此,有必要采取理论成熟且控制效果良好的主动控制以抑制其振动响应,但是铁路钢桥结构由于其粗大、自由度较多的特点使得该种结构构件物理参数具有不确定性以及易变性从而导致大多数主动控制算法对铁路钢桥结构的振动抑制效果并不理想,相对而言,鲁棒控制算法能够有效处理以上的不确定性,因此对采取鲁棒控制下铁路钢桥的振动响应抑制效果展开深入研究非常必要。随着振动控制理论的不断深入,国内外学者对鲁棒控制的研究亦取得了令人瞩目的成就[1−5]。Oucheriah[6]针对具有时变时滞且承受功能特性确定的未知边界这样一类不确定动力系统设计了一个自适应鲁棒控制器,研究表明在与时滞相关的矩阵范数约束满足的条件下,该控制器所求得的解收敛;Claudio等[7]对装置MRD半主动悬架系统采用 LQG/LTR鲁棒控制算法,数值和试验结果表明系统的安全性和舒适性得以改善;WANG等[8]针对风激励下的高层建筑提出了一种鲁棒滤波滑模控制,并通过对装置有ATMD的76层建筑在风激励下的基准问题应用该方法来评估其性能,结果表明该方法与 LQG和其他滑模控制法相比对于结构刚度的不确定性具有更好的鲁棒性;Luu等[9]为降低高速铁路桥梁的共振响应,提出了使用 H∞控制算法的半主动磁流变阻尼器,为提高该 MR阻尼器控制力的循迹能力引入相应的权函数,最后通过对具有不确定和时滞参数的铁路桥梁模型控制效果的分析与比较验证所提方法的有效性。刘鹏飞等[10]研究了考虑土-结构相互作用时桥梁结构的MRD半主动振动控制,分别采用LQR和H∞控制算法对比分析桥梁响应的控制效果,结果表明在场地条件较差时,使用 H∞控制算法时其鲁棒性更好,能获得较好的控制效果;李志军等[11]针对LQR 主动控制算法的缺陷,提出了对结构参数和外部激励的不确定性均有较好适应性的鲁棒 H∞最优控制,结果表明其效果更好。霍林生等[12]基于结构参数的不确定性设计了 H∞鲁棒控制器,将其应用于装置AMD的两层结构模型的振动台试验,最终证明了该控制器能有效处理结构的不确定性。综上所述,虽然鲁棒控制理论与实践比较成熟,但是对于采用AMD的铁路钢桥在列车荷载下的鲁棒振动控制研究相对较少。为此,对设置有AMD系统的铁路钢桥在不同速度列车荷载作用下使用鲁棒控制算法的振动特性展开了研究。以某铁路钢桥为工程背景,建立了该桥在装置AMD系统时承受列车荷载作用下的受控状态方程和鲁棒控制算法,同时,为了后续的鲁棒疲劳延寿控制的深入展开,本文选取桥梁相关节点的位移和应变作为研究指标,然而这两个指标又具有粗糙性和精确性不匹配等特点,因此本文采用多尺度模型建立了全桥壳体模型以及下弦节点实体子模型,研究其在使用未受控制、LQR控制、鲁棒控制算法下跨中节点位移振动响应和危险点最大正应变的控制效果,得到鲁棒控制的优势,进而为后续的鲁棒延寿控制做好准备。
1 铁路钢桥鲁棒控制理论
1.1 设置AMD系统的受控状态方程
在列车荷载作用下,铁路钢桥以竖向振动为主,且其跨中振动位移最大,所以应将AMD系统设置在跨中,图1所示为该AMD系统的动力学模型。在列车竖向荷载F(t),以及AMD系统提供的控制力U(t)作用下,铁路钢桥结构的受控运动方程可表示为[13]:
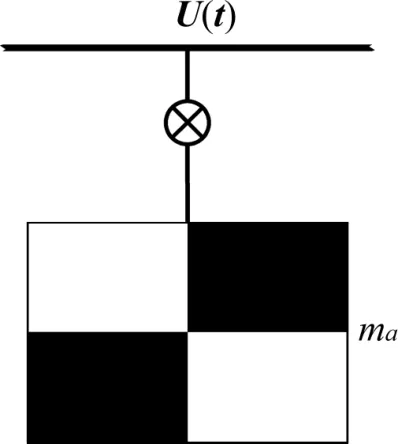
图1 AMD系统模型Fig. 1 AMD system model

式中:M,C和K分别是结构的质量、阻尼和刚度矩阵;X,X˙和X˙分别是结构的位移、速度和加速度向量。Ds和Bs分别表示相应的位置向量。
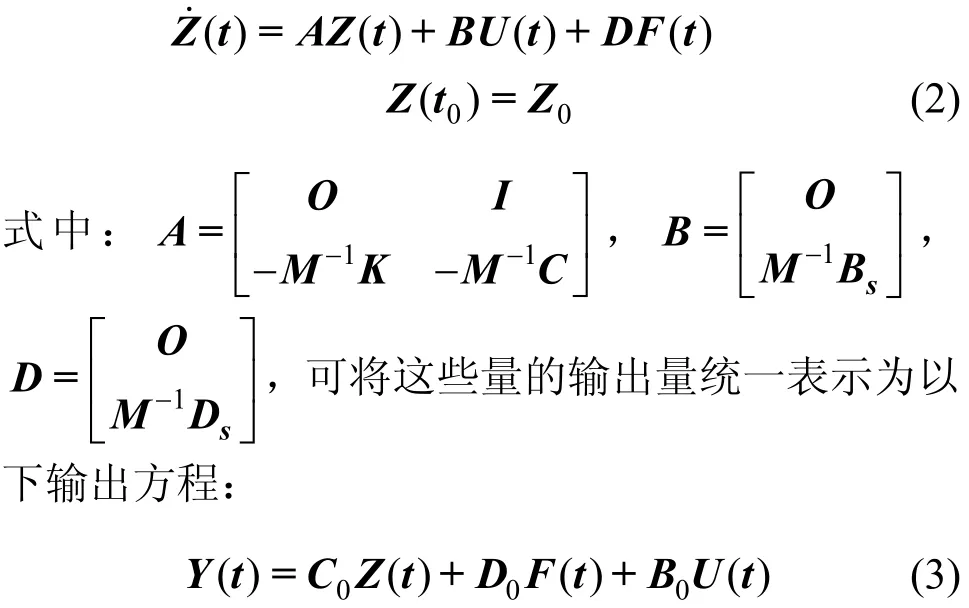
式中:Y(t)为输出向量;C0是输出矩阵;D0和 B0是直接传递矩阵。
1.2 铁路钢桥鲁棒控制
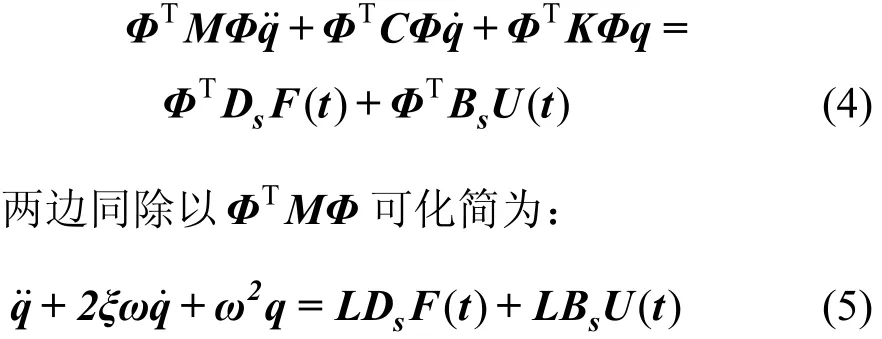
使用振型叠加法,则在正规坐标下x=Φq,对方程(1)两边同乘TΦ可得[14]:
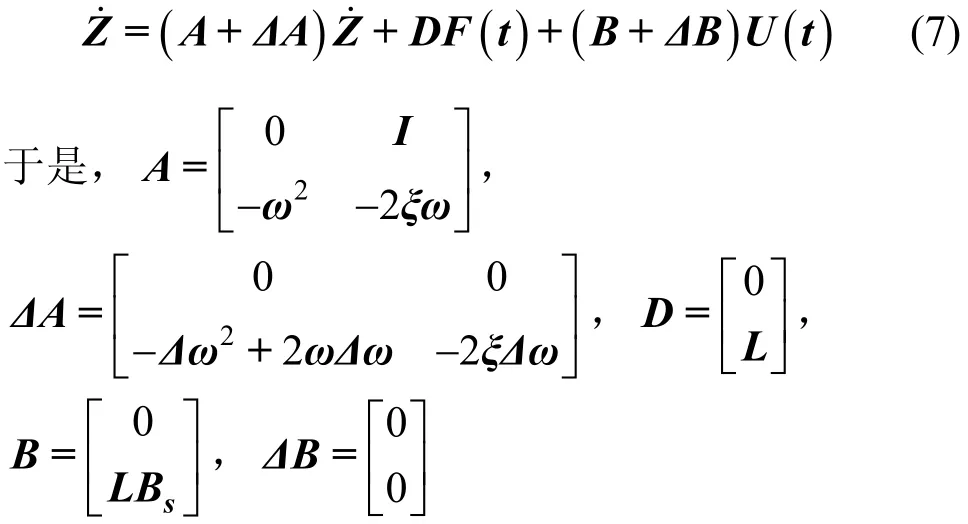
本文以频率变化Δω作为不确定参数进行研究,于是根据式(5)可得其受控下的运动方程为:

根据文献[15],可知钢桥结构的受控状态方程为:
可得:


式中:ri为第i阶频率的变化参数;r(t)为对角矩阵,可令于是有:

推论 对系统(8),存在状态反馈-U=GZ,使闭环系统二次稳定的充要条件为:存在一个常数ε>0,使得下面代数Riccati方程:
如果解存在,则闭环系统二次稳定的状态反馈控制律,亦即鲁棒控制的控制力为:

对于常数 ε,其为任意小值,本身并无实际含义,其取值满足方程(9)使其存在正定对称解P,采用人为假设对其初始值进行确定,在满足方程(9)后,代入方程(11)进行控制力的求解,由此可知控制后的振动状态,不断对ε的取值进行调整以得到优良的控制效果,本研究中最终确定的 ε取值为1.0×10−4。
2 鲁棒控制算例
2.1 工程背景
以某铁路钢桥为研究背景,对不同速度列车荷载作用下使用鲁棒控制算法时其竖向位移振动响应和下弦节点最大正应变的抑制效果进行了研究。该桥主体为焊接钢桁架结构,总长度为480 m,由四跨组成,各跨跨长均为120 m,高度和宽度分别为14.5 m和13 m,各跨桁架均有10个节间,节间长度为12 m,桁架主跨如图2所示(图中限于篇幅只画出两跨,对称两跨并未画出)。桁架腹杆为宽翼缘H型钢,上下弦杆为箱型截面,钢桥纵横梁以及上下平联等构件均采用H型钢,上下弦节点为焊接整体式,各杆件与节点采用螺栓连接,跨中下弦大节点如图2所示,其高度为1.5 m,长度3.5 m,板厚40 mm,下弦箱梁截面尺寸为800 mm×800 mm。
2.2 有限元模型
以该桥的结构设计图纸为依据,使用有限元分析软件ANSYS建立该铁路钢桁架桥梁的有限元模型,如图3所示,模型构件均采用实际尺寸,对该桥梁全桥模型采用shell63壳体单元模拟,模型总单元数为106 137,而对跨中下弦大节点采用solid185单元模拟,模型总单元数为28 834。采用模态分析法对该结构的振型和自振频率进行求解。

图2 钢桥桁架主跨及下弦节点板示意图Fig. 2 Diagrammatic sketch of main span of steel bridge truss and lower-chord node plate
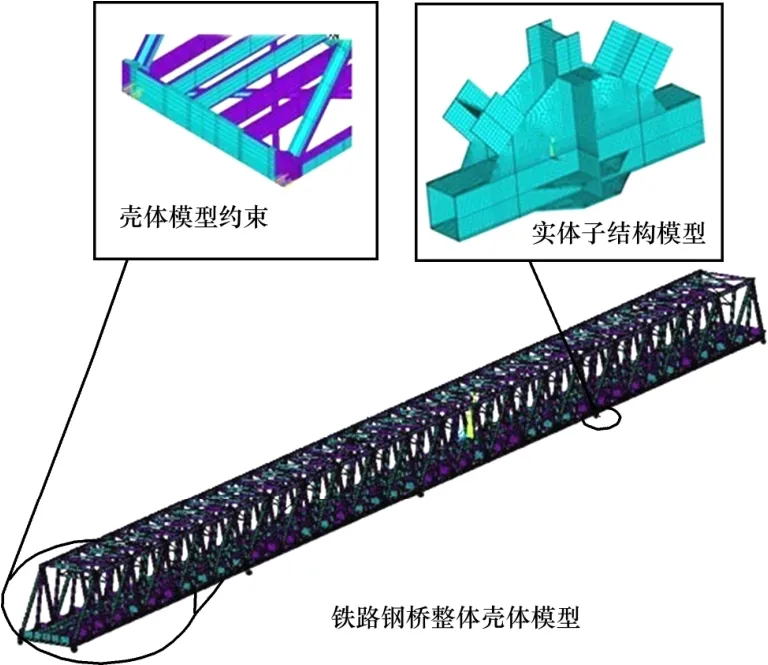
图3 钢桥整体壳体模型及下弦节点实体子模型Fig. 3 Steel bridge integral shell model and lower-chord node entity submodel
2.3 AMD系统设置
在列车荷载作用下,铁路钢桥的竖向振动与水平方向上的响应相比其反应更大,且竖向响应最大部位位于每跨跨中部位,所以为减小列车荷载作用下主梁的竖向振动位移,在钢桥每跨跨中布置AMD系统,将跨中两侧各放置10个AMD系统,则在四跨主梁中AMD系统的总数为80个。参考喻梅等[16−17]结合钢桥的工作环境,对AMD系统采取悬挂式进行布置,其立面布置图如图4所示。

图4 AMD系统立面布置图Fig. 4 Elevation layout of AMD system
2.4 鲁棒控制效果
2.4.1参数选取
由于实际参数的不确定性获取非常困难,为验证鲁棒控制的适应性,显示该算法在强烈变化作用下仍有良好的控制效果,所以选取时间相关型的正弦函数表示其变化规律,表达式为 r(t)=Aωsin(2π fωt),式中,对于参数Aω和fω范围的确定,到目前为止,并没有相关的文献说明结构的变化幅度和频率的取值规律,为了研究的方便以说明鲁棒控制的有效性,人为选取较为可能的范围进行分析,因此本文 Aω的取值为 0~0.15,fω的取值为 0~1.0 Hz,为研究fω的取值,可首先对Aω取最大值0.15,因鲁棒控制是与LQR控制进行比较,所以对正弦式中fω应首先研究其变化对 LQR控制性能的影响。图 5给出了参数fω在不变和变化时,采用LQR算法时钢桥跨中节点在列车荷载下的竖向位移响应,容易看出,fω不变时,LQR主动控制效果不变,fω发生变化且取值为 0.6时,位移响应达到最大值 12.78 mm,LQR控制效果最差。因此,为研究鲁棒控制对振动响应的抑制效果,应取fω=0.6进行对比分析,于是有r(t)=0.15sin(2π×0.6t),利用该式可以对LQR主动控制以及鲁棒控制的效果进行分析。鉴于该铁路钢桥线路主要用于进行货物的运输,其设计时速为100 km/h,本文为更好地验证鲁棒振动控制效果的有效性并使所得结果具有更广的适用性,使用72,90和108 km/h 3种速度的列车荷载进行对比分析并相互验证以获得预期的目标。
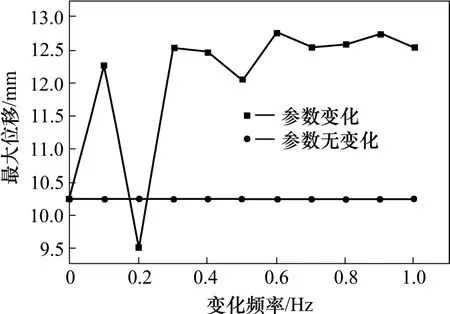
图5 参数fω与竖向振动位移控制效果的关系Fig. 5 Relationship between parameter fω and control effect of vertical vibration displacement
2.4.2全桥壳体模型跨中节点竖向振动控制效果
图6给出了在不确定性r(t)=0.15 sin(2π×0.6t)下,设置AMD系统的铁路钢桥当采用鲁棒控制算法、LQR主动控制算法和不控制时,在速度为 72 km/h的列车荷载作用下,其跨中节点竖向位移响应的时程曲线。可以看出,在列车荷载作用下,该桥梁结构因为采用了AMD系统进行抑制,2种主动控制算法下跨中节点的响应与原结构的相比均得到明显的控制,从数据上看,使用 LQR主动控制算法后跨中节点竖向位移的最大值由控制前的15.44 mm减少到12.75 mm,而鲁棒控制算法下其对应的最大值从15.44 mm降低到9.83 mm,二者的控制率分别为17.42%和36.33%。
为了验证鲁棒控制的有效性,从平均角度说明鲁棒控制的效果,取相应位移最大值的均方根(RMS)值进行辅助性分析,通过不同算法下的位移时程曲线可以求得,不受控制、主动控制、鲁棒控制时位移最大值对应的RMS值分别为8.1,4.6和4.3 mm。
综上可以看出,在列车荷载作用下,该铁路钢桥跨中节点竖向位移响应最大值的鲁棒控制效果明显优于LQR主动控制,且从RMS值也可以看出鲁棒控制效果略优于LQR控制。
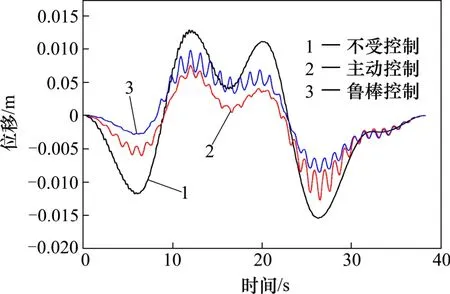
图6 跨中节点竖向振动位移时程曲线Fig. 6 Vertical vibration displacement time history curve of midspan node

图7 不确定参数Aω与竖向位移最大值的关系Fig. 7 Relationship between Aω and maximum value of vertical displacement
对于以上的分析,其不确定性r(t)中Aω取为固定值0.15,为进一步说明该铁路钢桥在不确定性参数变化时鲁棒控制的效果优于 LQR主动控制,所以应分析当 Aω发生变化时,该桥梁在 2种主动控制算法下跨中节点竖向位移最大值的变化规律,选取不确定性参数 r(t)=Aωsin(2π×0.6t),其中,fω=0.6时,LQR主动控制的效果最差,作为对比,fω取为固定值0.6,而对于Aω其变化范围是0~0.15,可将其变化幅度取为0.03进行分析。图7给出了两种主动控制算法下该铁路钢桥跨中节点竖向位移最大值与Aω之间的变化规律,容易看出:随着Aω的增大,2种主动控制算法下的最大位移均不断增加,在 LQR主动控制算法下跨中节点竖向最大位移变化范围是10.26~12.75,变化幅度平均为0.50,而在鲁棒控制算法下对应的变化范围是7.99~9.83,变化幅度平均为0.37,且在同一Aω下,LQR控制下的最大位移始终大于鲁棒控制的最大位移,由此可以说明鲁棒控制的效果优于 LQR主动控制,且之前对于竖向振动位移的分析选取 Aω=0.15是符合逻辑的。
2.4.3下弦大节点实体子模型危险点正应变控制效果
为了验证鲁棒控制效果的正确性,同时为了后续的鲁棒延寿控制研究做好准备,对该铁路钢桥下弦大节点实体子模型中危险点使用鲁棒控制算法、LQR主动控制算法和不控制时的最大正应变状态进行分析,以上一节作为参照,首先取不确定性r(t)=0.15sin(2π×0.6t),图8给出了车速为72 km/h下2种控制算法下最大正应变时程曲线。容易看出,相比于不受控制的情况,2种主动控制算法下危险点最大正应变均得到一定的抑制效果。具体而言,当不受控制时,其最大值为 5.54×10−4,最小值为3.28×10−4,使用LQR主动控制算法时其最大值为5.35×10−4,最小值为 3.74×10-4,而鲁棒控制算法下最大值为 5.17×10−4,最小值为 3.53×10−4。通过不同算法下的最大正应变时程曲线可以求得,不受控制、主动控制、鲁棒控制时最大正应变对应的RMS 值分别为 4.69×10−4,4.61×10−4和 4.56×10−4。对比可知,对于危险点最大正应变的控制,鲁棒控制的效果比LQR主动控制更好。
与上一节的分析内容一致,为了进一步说明该铁路钢桥在不确定性参数变化时其下弦大节点实体子模型危险点最大正应变的鲁棒控制效果优于LQR主动控制,仍需对Aω的变化进行分析,其变化范围是0~0.15,则变化幅度仍取为0.03。图9给出了2种主动控制算法下危险点最大正应变的最大值与Aω之间的变化规律,容易看出:随着Aω的变化,2种主动控制算法下正应变最大值均不断增加,在 LQR主动控制算法下正应变最大值的变化范围是 3.75×10−4~5.35×10−4,平均变化幅度为 0.32,而在鲁棒控制算法下对应的变化范围是3.67×10−4~5.17×10−4,平均变化幅度为 0.30,且在同一Aω下,LQR控制下的正应变最大值始终大于鲁棒控制下的最大值,所以鲁棒控制的效果优于LQR主动控制,且本节开始对于最大正应变控制的分析中选取Aω=0.15是符合逻辑的。
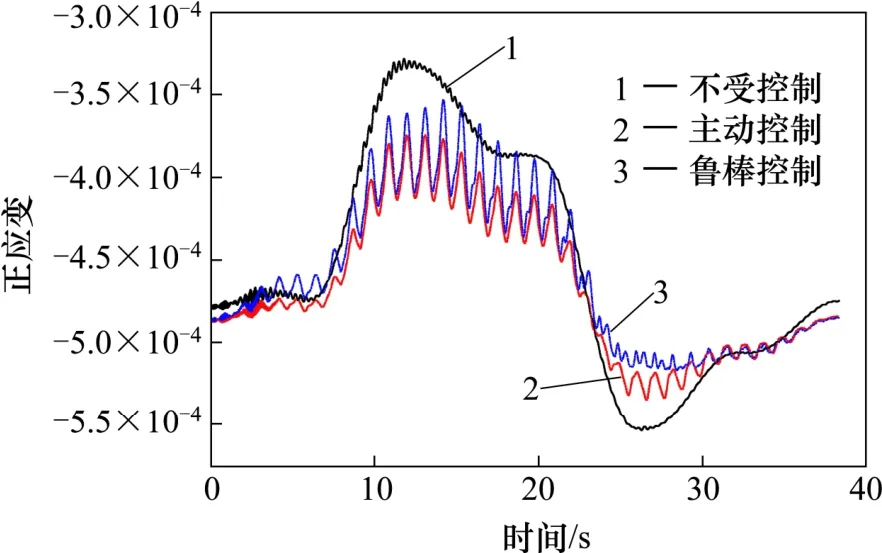
图8 临界面最大正应变时程曲线Fig. 8 Maximum normal strain time history curve of critical plane

图9 不确定参数Aω与正应变最大值的关系Fig. 9 Relationship between parameter Aω and maximum of normal strain
2.4.4不同车速下的控制效果
图10给出了在不确定性r(t)=0.15sin(2π×0.6t)下,设置AMD系统的铁路钢桥当采用鲁棒控制算法、LQR主动控制算法和不控制时,在90 km/h和108 km/h(图中由上至下)2种不同速度的列车荷载作用下,其跨中节点竖向位移响应的时程曲线。可以看出,在不同车速荷载下,该桥梁结构因为采用了AMD系统进行抑制,2种主动控制算法下跨中节点的响应与原结构的相比均得到明显的控制,从数据上看,当车速为90 km/h时,使用LQR主动控制算法后相对应的最大值由控制前的15.57 mm减少到 12.66 mm,而鲁棒控制算法下该最大值从15.57 mm降低到 9.81 mm,二者的控制率分别为18.69%和36.99%;当车速为108 km/h时,使用LQR主动控制算法后对应的最大值由控制前的 15.47 mm减少到12.75 mm,而鲁棒控制算法下该最大值从15.47 mm降低到9.55 mm,二者的控制率分别为17.58%和38.27%。通过以上对比分析可知,对于参数不确定的铁路钢桥承受不同时速的列车荷载时,其节点竖向位移的响应在鲁棒控制算法下的控制效果明显优于LQR主动控制;结合图6可知,对于不同时速下的列车荷载作用,鲁棒控制的效果相差较小。
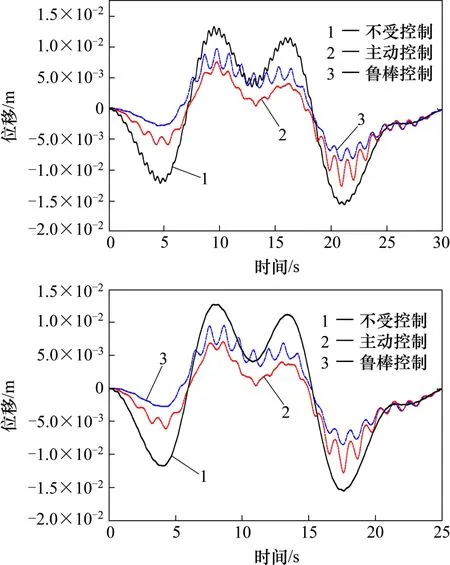
图10 不同车速下跨中节点竖向振动位移时程曲线Fig. 10 Time history curve of vertical vibration displacement node under different vehicle speeds
图11给出了在不确定性r(t)=0.15sin(2π×0.6t)下,设置AMD系统的铁路钢桥当采用鲁棒控制算法、LQR主动控制算法和不控制时,在90 km/h和108 km/h(图中由上至下)2种不同速度的列车荷载作用下,危险点正应变最大值的时程曲线。容易看出,当车速为90 km/h时,相应的最大正应变在不受控制时,其最大值为5.55×10−4,最小值为3.25×10−4,使用LQR主动控制算法时其最大值为5.35×10−4,最小值为 3.74×10−4,而鲁棒控制算法下最大值为 5.17×10−4,最小值为 3.54×10−4;当车速为108 km/h时,该最大正应变不受控制时,其最大值为5.53×10−4,最小值为 3.31×10−4,使用 LQR 主动控制算法时其最大值为 5.35×10−4,最小值为3.74×10−4,而鲁棒控制算法下最大值为 5.17×10-4,最小值为3.53×10−4。对比可知:LQR主动控制与鲁棒控制算法均能在一定程度上抑制危险点最大正应变,且鲁棒控制相比 LQR主动控制而言,控制效果更好;结合图8可知,鲁棒控制的效果对速度变化不敏感。
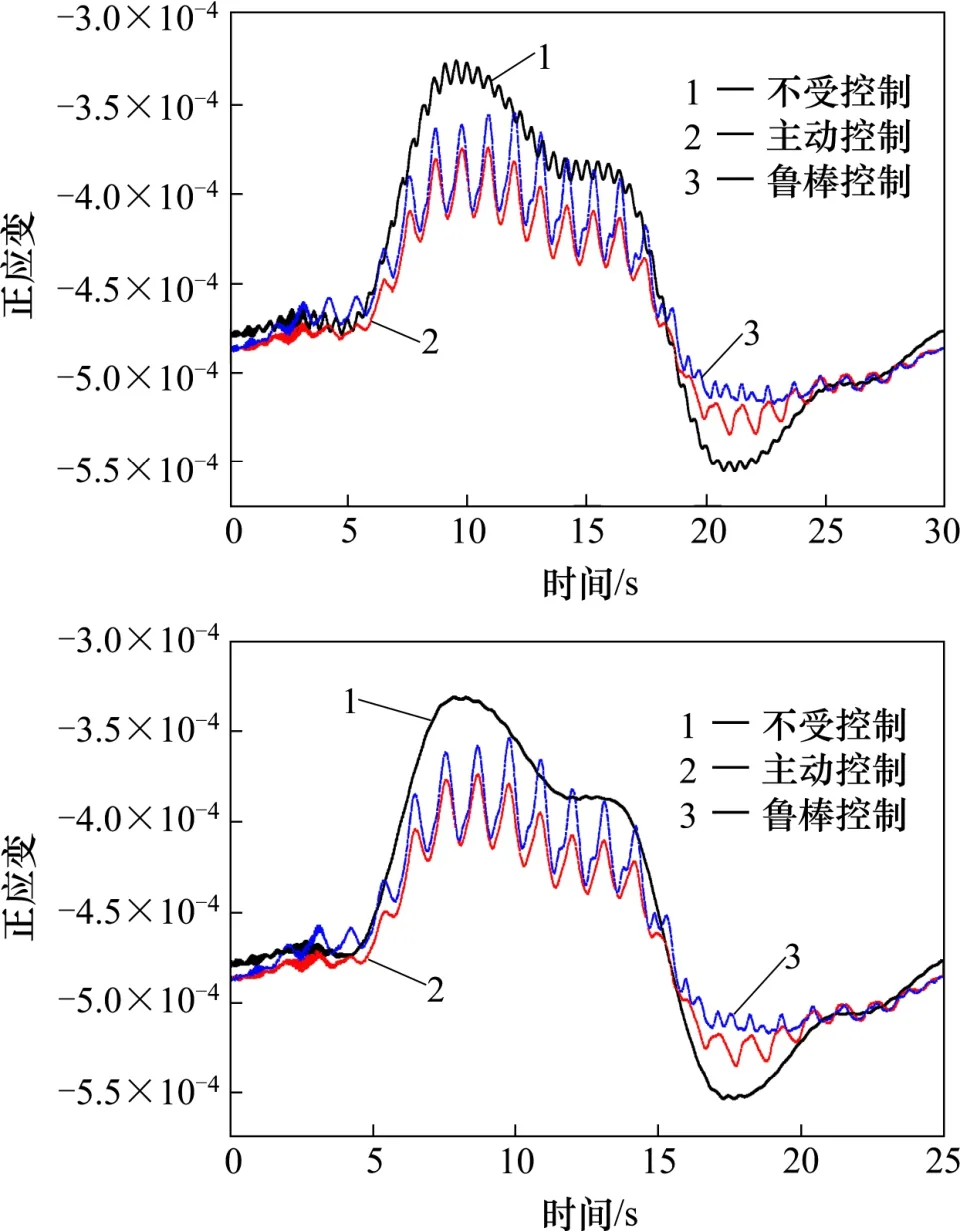
图11 不同车速下临界面最大正应变时程曲线Fig. 11 Time history curve of maximum of critical plane positive strain under different vehicle speeds
3 结论
1) 对于参数不确定的铁路钢桥,应采取鲁棒控制以应对其在列车荷载作用下产生的振动响应。
2) 在列车荷载作用下,LQR主动控制与鲁棒控制均能够有效抑制钢桥节点的竖向位移以及下弦大节点危险点的最大正应变,但鲁棒控制的效果明显比 LQR主动控制的效果更好,而且其效果对速度变化不敏感。
3) 本文所做的研究工作对后续的鲁棒疲劳延寿的研究具有重要的先导与准备作用,相关设置AMD的铁路钢桥疲劳裂纹萌生鲁棒延寿控制的研究将另文专述。
参考文献:
[1] 邓春萍, 陈晖, 吴敏. 非线性鲁棒控制系统分析和设计的μ方法[J]. 铁道科学与工程学报, 2001, 19(2): 69−73.DENG Chunping, CHEN Hui, WU Min. μ method for nonlinear robust control system analysis and synthesis[J].Journal of Railway Science and Engineering, 2001, 19 (2):69−73.
[2] 杨胜跃, 樊晓平, 杨晓峰. 基于新型 CMAC神经网路的不确定性机器人鲁棒控制[J]. 铁道科学与工程学报,2001, 19(3): 64−68.YANG Shengyue, FAN Xiaoping, YANG Xiaofeng.Robot robust control based on new CMAC neural network[J]. Journal of Railway Science and Engineering,2001, 19(3): 64−68.
[3] Fakhari V, Ohadi A, Talebi H A. A robust adaptive control scheme for an active mount using a dynamic engine model[J]. Journal of Vibration and Control, 2013, 21(11):2223−2245.
[4] ZHANG K, Behal A. Continuous robust control for aeroelastic vibration control of a 2-D airfoil under unsteady flow[J]. Journal of Vibration and Control, 2014,22(12): 2841−2860.
[5] Thenozhi S, YU W. Stability analysis of active vibration control of building structures using PD/PID control[J].Engineering Structures, 2014, 81(15): 208−218.
[6] Oucheriah S. Adaptive robust control of a class of dynamic delay systems with unknown uncertainty bounds[J]. International Journal of Adaptive Control &Signal Processing, 2015, 15(15): 53−63.
[7] Claudio Crivellaro, Decio Crisol Donha. LQG/LTR robust control applied to semi-active suspension system using MR dampers[J]. International Journal of Mechanical Engineering and Automation, 2015, 2(1):22−31.
[8] WANG N, Adeli H. Robust vibration control of wind-excited highrise building structures[J]. Journal of Civil Engineering & Management, 2015, 21(8): 967−976.
[9] Luu M M D, Martinez-Rodrigo, Zabel V, et al.Semi-active magnetorheological dampers for reducing response of high-speed railway bridges[J]. Control Engineering Practice, 2014, 32(32): 147−160.
[10] 刘鹏飞, 王波, 汪正兴. 考虑土−结构相互作用下桥梁震动的半主动控制研究[J]. 力学季刊, 2016, 37(1):194−200.LIU Pengfei, WANG Bo, WANG Zhengxing. Study on semi-active vibration control of bridge considering soil-structure interaction[J]. Chinese Quarterly of Mechanics, 2016, 37(1): 194−200.
[11] 李志军, 王社良. 建筑结构的鲁棒 H∞最优控制[J]. 地震工程与工程振动, 2013, 33(2): 176−184.LI Zhijun, WANG Sheliang. A robust H∞ optimal control method for seismic protection of building structures[J].Earthquake Engineering and Engineering Vibration, 2013,33(2): 176−184.
[12] 霍林生, 李宏男, 宋钢兵. 不确定性AMD系统的鲁棒控制器设计研究[J]. 武汉理工大学学报, 2010, 32(9):40−44.HUO Linsheng, LI Hongnan, SONG Gangbing. Research on the design of robust controller for AMD system with uncertainties[J]. Journal of Wuhan University of Technology, 2010, 32(9): 40−44.
[13] 欧进萍. 结构振动控制: 主动、半主动和智能控制[M].北京: 科学出版社, 2003.OU Jinping. Structural vibration control: active,semi-active and intelligent control[M]. Beijing: Science Press, 2003.
[14] R.克拉夫, J.彭津. 结构动力学[M]. (2版)(修订版). 北京: 高等教育出版社, 2006.R. Clough, J. Peng Jin. Dynamics of structures[M]. (2nd ed) (Revised Edition). Beijing: Higher Education Press,2006.
[15] 褚健. 鲁棒控制理论及应用[M]. 杭州: 浙江大学出版社, 2000.CHU Jian. Robust control theory and application[M].Hangzhou: Zhejiang University Press, 2000.
[16] 喻梅. 大跨度桥梁颤振及涡激振动主动控制[D]. 成都:西南交通大学, 2013.YU Mei. Active control for flutter and vortex-induced vibration of long-span bridges[D]. Chengdu: Southwest Jiao Tong University, 2013.
[17] 何建, 孙炳楠, 瞿伟廉, 等. 大跨度斜拉桥颤振主动控制研究[J]. 振动工程学报, 1999, 12(2): 286−291.HE Jian, SUN Bingnan, QU Weilian, et al. Study on the active control of flutter of long-span cable-stayed bridge[J]. Journal of Vibration Engineering, 1999, 12(2):286−291.
